Performance Analysis of Token Bus Protocol with Maintenance Functions Joon-Nyun Kim Iowa State University
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Part 2: Packet Transmission
Mesh networks LAN technologies and network topology • Early local networks used dedicated links between each pair of computers LANs and shared media • Some useful properties Locality of reference – hardware and frame details can be tailored for Star, bus and ring topologies each link Medium access control protocols – easy to enforce security and privacy Disadvantages of meshes Links between rooms/buildings • Poor scalability • Many links would follow the same physical path Shared Communication Channels Locality of reference • Shared LANs invented in the 1960s • LANs now connect more computers than any other form of network • Rely on computers sharing a single medium • The reason LANs are so popular is due to • Computers coordinate their access the principle of locality of reference • Low cost – physical locality of reference - computers more • But not suitable for wide area - likely to communicate with those nearby communication delays inhibit coordination – temporal locality of reference - computer is more likely to communicate with the same computers repeatedly 1 LAN topologies • LANs may be categorised according to topology ring bus star Pros and cons Example bus network: Ethernet • Star is more robust but hub may be a • Single coaxial cable - the ether - to which bottleneck computers connect • Ring enables easy coordination but is • IEEE standard specifies details sensitive to a cable being cut – data rates • Bus requires less wiring but is also sensitive – maximum length and minimum separation to a cable being cut – frame formats -

Upcoming Standards in Wireless Local Area Networks
Preprint: http://arxiv.org/abs/1307.7633 Original Publication: UPCOMING STANDARDS IN WIRELESS LOCAL AREA NETWORKS Sourangsu Banerji Department of Electronics & Communication Engineering, RCC-Institute of Information Technology, India Email: [email protected] ABSTRACT: Network technologies are However out of every one of these standards, traditionally centered on wireline solutions. WLAN and recent developments in WLAN Wireless broadband technologies nowadays technology will be our main subject of study in this particular paper. The IEEE 802.11 is the most provide unlimited broadband usage to users widely deployed WLAN technology as of today. that have been previously offered simply to Another renowned counterpart is the HiperLAN wireline users. In this paper, we discuss some of standard by ETSI. These two technologies are the upcoming standards of one of the emerging united underneath the Wireless Fidelity (Wi-fi) wireless broadband technology i.e. IEEE alliance. In literature though, IEEE802.11 and Wi- 802.11. The newest and the emerging standards fi is used interchangeably and we will also continue with the same convention in this fix technology issues or add functionality that particular paper. A regular WLAN network is will be expected to overcome many of the associated with an Access Point (AP) in the current standing problems with IEEE 802.11. middle/centre and numerous stations (STAs) are connected to this central Access Point (AP).Now, Keywords: Wireless Communications, IEEE there are just two modes in which communication 802.11, WLAN, Wi-fi. normally takes place. 1. Introduction Within the centralized mode of communication, The wireless broadband technologies were communication to/from a STA is actually carried developed with the objective of providing services across by the APs. -

The Design of PROFIBUS-DP HUB Based on FPGA
International Conference on Computer Science and Service System (CSSS 2014) The Design of PROFIBUS-DP HUB based on FPGA Jiao Ping Zhou Tong Lab. of Networked Control Systems Lab. of Networked Control Systems Shenyang Institute of Automation (SIA), Chinese Shenyang Institute of Automation (SIA), Chinese Academy of Sciences China, Shenyang Academy of Sciences China, Shenyang [email protected] [email protected] Abstract—This paper analyzes the PROFIBUS-DP and specified the standard EIA RS-485, and the traffic rate is physical layer signals states, DP time series and other from 9.6kbps to 12Mbps [2, 3, 6]. characteristics. In the past, PROFIBUS-DP HUB common IEC 1158-2 specified the station number of problems of poor universal apply, shape communication is PROFIBUS-DP is 126 (station address from 0 to 125 contain more time-consuming, required message analysis, Drop frame master and slave station) [4]. In the one segment of etc, this paper propose a new design of PROFIBUS-DP HUB PROFIBUS-DP, the maximum station is 32. DP HUB or DP which based on FPGA. The design contain a detector which Repeater device requires the use, if want to connect more used to monitor the physical layer signal state of the DP bus, stations or change the network topology. As figure shown, use of FPGA synthesis logic signal, could control the direction DP HUB or DP Repeater divided the DP network into many of data flow in the physical layer, and Unrelated with the subnet segments [7]. Each interface of DP HUB is a upper layer protocol, without message analysis, compliance the protocol which used the standard RS-485, and Repeater, which can independently drive a PROFIBUS baudrate-adaptive. -

Field Networking Solutions
Field Networking Solutions Courtesy of Steven Engineering, Inc. ! 230 Ryan Way, South San Francisco, CA 94080-6370 ! Main Office: (650) 588-9200 ! Outside Local Area: (800) 258-9200 ! www.stevenengineering.com TYPES OF FIELDBUS NETWORKS* Field Networking 101 Features and Benefits of Fieldbus Networks The combination of intelligent field devices, digital bus networks, and various open communications protocols Fieldbus networks provide an array of features and benefits that make them an excellent choice is producing extraordinary results at process plants in nearly all process control environments. around the world. Compared to conventional technology, fieldbus networks deliver the following benefits: Just as our ability to retrieve, share, and analyze data Reduced field wiring costs has increased tremendously by use of the Internet and - Two wires from the control room to many devices PC network technology in our homes and at our desk- Reduced commissioning costs tops, so has our ability to control and manage our - Less time and personnel needed to perform process plants improved. Digital connectivity in process I/O wiring checkouts - No time spent calibrating intermediate signals manufacturing plants provides an infrastructure for the (such as 4-20mA signals) - Digital values are delivered directly from field flow of real-time data from the process level, making it devices, increasing accuracy available throughout our enterprise networks. This data Reduced engineering/operating costs is being used at all levels of the enterprise to provide - Much smaller space required for panels, I/O racks, and connectivity boxes increased process monitoring and control, inventory and - Fewer I/O cards and termination panels for materials planning, advanced diagnostics, maintenance control system equipment - Lower power consumption by control system planning, and asset management. -

Efficiently Triggering, Debugging and Decoding Low-Speed Serial Buses
Efficiently Triggering, Debugging and Decoding Low-Speed Serial Buses Hello, my name is Jerry Mark, I am a Product Marketing Engineer at Tektronix. The following presentation discusses aspects of embedded design techniques for “Efficiently Triggering, Debugging, and Decoding Low-Speed Serial Buses”. 1 Agenda Introduction – Parallel Interconnects – Transition from Parallel to Serial Buses – High-Speed versus Low-Speed Serial Data Buses Low-Speed Serial Data Buses – Challenges – Technology Reviews – Measurement Solutions Summary 2 In this presentation we will begin by taking a glance at the transition from parallel-to-serial data and the challenges this presents to engineers. Then we will briefly review some of the most widely used low-speed serial buses in industry today and some of their key characteristics. We will turn our attention to the key measurements on these buses. Subsequently, we will present by example how the low-speed serial solution from Tektronix addresses these challenges. 2 Parallel Interconnects Traditional way to connect digital devices used parallel buses Advantages – Simple point-to-point connections – All signals are transmitted in parallel, simultaneously – Easy to capture state of bus (if you have enough channels!) – Decoding the bus is relatively easy Disadvantages – Occupies a lot of circuit board space – All high-speed connections must be the same length – Many connections limit reliability – Connectors may be very large 3 Parallel buses present all of the bits in parallel, as shown in the logic analyzer display. A parallel connection between two ICs can be as simple as point-to-point circuit board traces for each of the data lines. If you can physically probe these lines, it is easy to display the bus state on a logic analyzer or mixed signal oscilloscope. -

Comparison of Network Topologies for Optical Fiber Communication
International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181 Vol. 1 Issue 10, December- 2012 Comparison Of Network Topologies For Optical Fiber Communication Mr. Bhupesh Bhatia Ms. Ashima Bhatnagar Bhatia Department of Electronics and Communication, Department of Computer Science, Guru Prem Sukh Memorial College of Engineering, Tecnia Institute of Advanced Studies, Delhi Delhi Ms. Rashmi Ishrawat Department of Computer Science, Tecnia Institute of Advanced Studies, Delhi Abstract advent of the Information age. Optical In this paper, the various network topologies technologies can cost effectively meet have been compared. The signal is analyzed as it corporate bandwidth needs today and passes through each node in each of the network tomorrow. Internet connections offering topology. There is no appreciable signal degradation in the ring network. Also there is bandwidth on demand, to fiber on the increase in Quality factor i.e. signal keeps on LAN. Fiber to the home can provide true improving as it passes through the successiveIJERT IJERTbroadband connectivity for nodes. For the bus topology, the quality of signal telecommuters as well as converged goes on decreasing with increase in the number multimedia offerings for consumers [2]. of nodes and the power penalty goes on increasing. For the star topology, it is observed These different communication networks that received power values of each node at a can be configured in a number of same distance from the hub are same and the topologies. These include a bus, with or performance is same. For the tree topology, it is without a backbone, a star network, a observed that the performance is almost identical ring network, which can be redundant to the performance of ring topology, as signal quality is improved as it passes through the and/ or self-healing, or some successive nodes of the hierarchy. -

C:\Andrzej\PDF\ABC Nagrywania P³yt CD\1 Strona.Cdr
IDZ DO PRZYK£ADOWY ROZDZIA£ SPIS TREFCI Wielka encyklopedia komputerów KATALOG KSI¥¯EK Autor: Alan Freedman KATALOG ONLINE T³umaczenie: Micha³ Dadan, Pawe³ Gonera, Pawe³ Koronkiewicz, Rados³aw Meryk, Piotr Pilch ZAMÓW DRUKOWANY KATALOG ISBN: 83-7361-136-3 Tytu³ orygina³u: ComputerDesktop Encyclopedia Format: B5, stron: 1118 TWÓJ KOSZYK DODAJ DO KOSZYKA Wspó³czesna informatyka to nie tylko komputery i oprogramowanie. To setki technologii, narzêdzi i urz¹dzeñ umo¿liwiaj¹cych wykorzystywanie komputerów CENNIK I INFORMACJE w ró¿nych dziedzinach ¿ycia, jak: poligrafia, projektowanie, tworzenie aplikacji, sieci komputerowe, gry, kinowe efekty specjalne i wiele innych. Rozwój technologii ZAMÓW INFORMACJE komputerowych, trwaj¹cy stosunkowo krótko, wniós³ do naszego ¿ycia wiele nowych O NOWOFCIACH mo¿liwoYci. „Wielka encyklopedia komputerów” to kompletne kompendium wiedzy na temat ZAMÓW CENNIK wspó³czesnej informatyki. Jest lektur¹ obowi¹zkow¹ dla ka¿dego, kto chce rozumieæ dynamiczny rozwój elektroniki i technologii informatycznych. Opisuje wszystkie zagadnienia zwi¹zane ze wspó³czesn¹ informatyk¹; przedstawia zarówno jej historiê, CZYTELNIA jak i trendy rozwoju. Zawiera informacje o firmach, których produkty zrewolucjonizowa³y FRAGMENTY KSI¥¯EK ONLINE wspó³czesny Ywiat, oraz opisy technologii, sprzêtu i oprogramowania. Ka¿dy, niezale¿nie od stopnia zaawansowania swojej wiedzy, znajdzie w niej wyczerpuj¹ce wyjaYnienia interesuj¹cych go terminów z ró¿nych bran¿ dzisiejszej informatyki. • Komunikacja pomiêdzy systemami informatycznymi i sieci komputerowe • Grafika komputerowa i technologie multimedialne • Internet, WWW, poczta elektroniczna, grupy dyskusyjne • Komputery osobiste — PC i Macintosh • Komputery typu mainframe i stacje robocze • Tworzenie oprogramowania i systemów komputerowych • Poligrafia i reklama • Komputerowe wspomaganie projektowania • Wirusy komputerowe Wydawnictwo Helion JeYli szukasz ]ród³a informacji o technologiach informatycznych, chcesz poznaæ ul. -

Upcoming Standards in Wireless Local Area Networks
Preprint: http://arxiv.org/abs/1307.7633 Original Publication: Wireless & Mobile Technologies, Vol. 1, Issue 1, September 2013. [DOI: 10.12691/wmt-1-1-2] Upcoming Standards in Wireless Local Area Networks Sourangsu Banerji Department of Electronics & Communication Engineering, RCC-Institute of Information Technology, India Email: [email protected] ABSTRACT: In this paper, we discuss some widely deployed WLAN technology as of today. of the upcoming standards of IEEE 802.11 i.e. Another renowned counterpart is the HiperLAN Wireless Local Area Networks. The WLANs standard by ETSI. These two technologies are united underneath the Wireless Fidelity (Wi-fi) nowadays provide unlimited broadband usage alliance. In literature though, IEEE802.11 and Wi- to users that have been previously offered fi is used interchangeably and we will also simply to wireline users within a limited range. continue with the same convention in this The newest and the emerging standards fix particular paper. A regular WLAN network is technology issues or add functionality to the associated with an Access Point (AP) in the centre existing IEEE 802.11 standards and will be and numerous stations (STAs) are connected to this central Access Point (AP).There are just two expected to overcome many of the current modes in which communication normally takes standing problems with IEEE 802.11. place. Keywords: Wireless Communications, IEEE Within the centralized mode of communication, 802.11, WLAN, Wi-fi. communication to/from a STA is actually carried across by the APs. There's also a decentralized 1. Introduction mode in which communication between two STAs The wireless broadband technologies were can happen directly without the requirement developed with the objective of providing services associated with an AP in an ad hoc fashion. -

Notes-Cn-Unit-3
UNIT –0 3 ALOHA Unit-03/Lecture-01/ Lecture-02 Static Channel Allocation in LANs and MANs[RGPV/Jun 2010, Jun2014] Frequency Division Multiplexing - Frequency of one channel divided (usually evenly) among n users. Each user appears to have full channel of full frequency/n. Wastes bandwidth when user has nothing to send or receive, which is often the case in data communications. Other users cannot take advantage of unused bandwidth. Time Division Multiplexing - Time of one channel divided (usually evenly) among n users. Each user appears to have full channel for time/n. same problems as FDM. Analysis of Static Channel Allocation - Static allocation is intuitively a bad idea when considering that for an n divisions of a channel, any one user is limited to only 1/n channel bandwidth whether other users where accessing the channel or not. By limiting a user to only a fraction of the available channel, the delay to the user is increased over that if the entire channel were available. Intuitively, static allocation results in restricting one user to one channel even when other channels are available. Consider the following two diagrams, each with one user wanting to transmit 400 bits over a 1 bit per second channel. The left diagram would have a delay 4 times greater than the diagram on the right, delaying 400 seconds using 1 channel versus 100 second delay using the 4 channels. Static Allocation Dynamic Allocation One user with entire channel 1 channel per user up to 4 channels per user Generally we want delay to be small. -
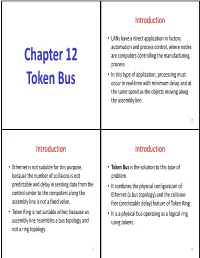
Token Bus Occur in Real‐Time with Minimum Delay, and at the Same Speed As the Objects Moving Along the Assembly Line
Introduction • LANs have a direct application in factory automation and process control, where nodes are computers controlling the manufacturing Chap ter 12 process. • In this type of application, processing must Token Bus occur in real‐time with minimum delay, and at the same speed as the objects moving along the assembly line. 2 Introduction Introduction • Ethernet is not suitable for this purpose, • Token Bus is the solution to this type of because the number of collisions is not problem. predictable and delay in sending data from the • It combines the physical configuration of control center to the computers along the Ethernet (a bus topology) and the collision‐ assembly line is not a fixed value. free (predictable delay) feature of Token Ring. • Token Ring is not suitable either, because an • It is a physical bus operating as a logical ring assembly line resembles a bus topology and using tokens. not a ring topology. 3 4 Figure 12-1 Physical Versus Logical Topology A Token Bus Network • The logical ring is formed based on the physical address of the stations in descending order. • Each station considers the station with the immediate lower address as the next station and the station with the immediate higher address as the previous station. • The station with the lowest address considers the station with the highest address the next station, and the station with the highest address considers the station with the lowest address the previous station. 5 6 Token Passing Token Passing • To control access to the shared medium, a • After sending all its frames or after the time small token frame circulates from station to period expires (whichever comes first), the station in the logical ring. -

Real-Time Communication Protocols: an Overview∗
Real-time communication protocols: an overview∗ Ferdy Hanssen and Pierre G. Jansen October 2003 Abstract This paper describes several existing data link layer protocols that provide real-time capabilities on wired networks, focusing on token-ring and Carrier Sense Multiple Access based networks. Existing modifications to provide better real-time capabilities and performance are also described. Finally the pros and cons regarding the At-Home Anywhere project are discussed. 1 Introduction In the past twenty-five years several different, wired networks have been designed and built. But not all of them are dependable, i.e. suitable for accomodating real-time traffic, or traffic with Quality of Service (QoS) requirements. Some were designed with QoS in mind, some had QoS added as an after-thought, and some do not support QoS requirements at all. The most popular wired network architecture used to date, IEEE 802.3 [46], pop- ularly called Ethernet1, does not provide any support for real-time traffic. There are no provisions to reserve bandwidth for a certain connection. Nodes access the network using the CSMA/CD (Carrier Sense Multiple Access with Collision Detect) technique [70]. The CSMA/CD algorithm does not define a collision resolvance protocol of its own. Ethernet uses the BEB (Binary Exponential Back-Off) algo- rithm. This algorithm resolves collisions in a non-deterministic manner, while the first requirement for a network to be called real-time is determinism. The most popular real-time network architecture, Asynchronous Transfer Mode (ATM), is used mostly for internetwork links these days. ATM provides high band- widths and QoS guarantees, but has proven to be too expensive for use as a lo- cal area network. -

COSC460 Report: Medium Access Control Protocols for WDM Optical Networks
COSC460 Report: Medium access control protocols for WDM optical networks November 6, 2001 Robert Mollard Associate Prof. K. Pawlikowski1 1Supervisor Abstract Wavelength-division multiplexing (WDM) has emerged as the most popular technology for utilising the huge bandwidth of optical fibre. This paper surveys medium access control protocols for the star, bus and ring WDM network topologies. The performance of two recently developed protocols, Pipelining Cyclic Scheduling Algorithm (PCSA) and Reservation/ACK/Transmission Protocol (RATP), is evaluated by stochastic simulation. It was found that RATP’s performance (measured by throughput and de- lay) degrades sharply with the increase in network size, making it impractical for use in metropolitan- or wide-area networks. PCSA does not suffer from this restriction, and can realise a throughput of 1. It also delivers short average packet delays, especially under light to moderate system loads. Keywords: Optical networks, wavelength division multiplexing, medium access control. Contents 1 Introduction 4 1.1Reportstructure........................... 5 2 Exploiting optical bandwidth 6 2.1 Time-division and Code-division multiplexing . 6 2.2 Wavelength-division multiplexing . 7 2.2.1 WDMnetworkclassification................. 7 3 Medium access control protocols 9 4 Previous Work 11 4.1 Indulska and Richards . 11 4.2Montgomery.............................. 11 4.3Li,MaodeandHamdi........................ 11 5 Star Topology 12 5.1Demonstrators............................ 13 5.2MACprotocols............................ 13 5.2.1 AlohaandSlottedAloha.................. 15 5.2.2 I-SA.............................. 15 5.2.3 I-SA*............................. 15 5.2.4 I-TDMA............................ 16 5.2.5 I-TDMA*........................... 16 5.2.6 TDMA-C........................... 16 5.2.7 DT-WDMA.......................... 16 5.2.8 Conflict-free DT-WDMA .