Coarse-Grained Simulation of a Real-Time Process Control Network Under Peak Load
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Upcoming Standards in Wireless Local Area Networks
Preprint: http://arxiv.org/abs/1307.7633 Original Publication: UPCOMING STANDARDS IN WIRELESS LOCAL AREA NETWORKS Sourangsu Banerji Department of Electronics & Communication Engineering, RCC-Institute of Information Technology, India Email: [email protected] ABSTRACT: Network technologies are However out of every one of these standards, traditionally centered on wireline solutions. WLAN and recent developments in WLAN Wireless broadband technologies nowadays technology will be our main subject of study in this particular paper. The IEEE 802.11 is the most provide unlimited broadband usage to users widely deployed WLAN technology as of today. that have been previously offered simply to Another renowned counterpart is the HiperLAN wireline users. In this paper, we discuss some of standard by ETSI. These two technologies are the upcoming standards of one of the emerging united underneath the Wireless Fidelity (Wi-fi) wireless broadband technology i.e. IEEE alliance. In literature though, IEEE802.11 and Wi- 802.11. The newest and the emerging standards fi is used interchangeably and we will also continue with the same convention in this fix technology issues or add functionality that particular paper. A regular WLAN network is will be expected to overcome many of the associated with an Access Point (AP) in the current standing problems with IEEE 802.11. middle/centre and numerous stations (STAs) are connected to this central Access Point (AP).Now, Keywords: Wireless Communications, IEEE there are just two modes in which communication 802.11, WLAN, Wi-fi. normally takes place. 1. Introduction Within the centralized mode of communication, The wireless broadband technologies were communication to/from a STA is actually carried developed with the objective of providing services across by the APs. -

C:\Andrzej\PDF\ABC Nagrywania P³yt CD\1 Strona.Cdr
IDZ DO PRZYK£ADOWY ROZDZIA£ SPIS TREFCI Wielka encyklopedia komputerów KATALOG KSI¥¯EK Autor: Alan Freedman KATALOG ONLINE T³umaczenie: Micha³ Dadan, Pawe³ Gonera, Pawe³ Koronkiewicz, Rados³aw Meryk, Piotr Pilch ZAMÓW DRUKOWANY KATALOG ISBN: 83-7361-136-3 Tytu³ orygina³u: ComputerDesktop Encyclopedia Format: B5, stron: 1118 TWÓJ KOSZYK DODAJ DO KOSZYKA Wspó³czesna informatyka to nie tylko komputery i oprogramowanie. To setki technologii, narzêdzi i urz¹dzeñ umo¿liwiaj¹cych wykorzystywanie komputerów CENNIK I INFORMACJE w ró¿nych dziedzinach ¿ycia, jak: poligrafia, projektowanie, tworzenie aplikacji, sieci komputerowe, gry, kinowe efekty specjalne i wiele innych. Rozwój technologii ZAMÓW INFORMACJE komputerowych, trwaj¹cy stosunkowo krótko, wniós³ do naszego ¿ycia wiele nowych O NOWOFCIACH mo¿liwoYci. „Wielka encyklopedia komputerów” to kompletne kompendium wiedzy na temat ZAMÓW CENNIK wspó³czesnej informatyki. Jest lektur¹ obowi¹zkow¹ dla ka¿dego, kto chce rozumieæ dynamiczny rozwój elektroniki i technologii informatycznych. Opisuje wszystkie zagadnienia zwi¹zane ze wspó³czesn¹ informatyk¹; przedstawia zarówno jej historiê, CZYTELNIA jak i trendy rozwoju. Zawiera informacje o firmach, których produkty zrewolucjonizowa³y FRAGMENTY KSI¥¯EK ONLINE wspó³czesny Ywiat, oraz opisy technologii, sprzêtu i oprogramowania. Ka¿dy, niezale¿nie od stopnia zaawansowania swojej wiedzy, znajdzie w niej wyczerpuj¹ce wyjaYnienia interesuj¹cych go terminów z ró¿nych bran¿ dzisiejszej informatyki. • Komunikacja pomiêdzy systemami informatycznymi i sieci komputerowe • Grafika komputerowa i technologie multimedialne • Internet, WWW, poczta elektroniczna, grupy dyskusyjne • Komputery osobiste — PC i Macintosh • Komputery typu mainframe i stacje robocze • Tworzenie oprogramowania i systemów komputerowych • Poligrafia i reklama • Komputerowe wspomaganie projektowania • Wirusy komputerowe Wydawnictwo Helion JeYli szukasz ]ród³a informacji o technologiach informatycznych, chcesz poznaæ ul. -

Upcoming Standards in Wireless Local Area Networks
Preprint: http://arxiv.org/abs/1307.7633 Original Publication: Wireless & Mobile Technologies, Vol. 1, Issue 1, September 2013. [DOI: 10.12691/wmt-1-1-2] Upcoming Standards in Wireless Local Area Networks Sourangsu Banerji Department of Electronics & Communication Engineering, RCC-Institute of Information Technology, India Email: [email protected] ABSTRACT: In this paper, we discuss some widely deployed WLAN technology as of today. of the upcoming standards of IEEE 802.11 i.e. Another renowned counterpart is the HiperLAN Wireless Local Area Networks. The WLANs standard by ETSI. These two technologies are united underneath the Wireless Fidelity (Wi-fi) nowadays provide unlimited broadband usage alliance. In literature though, IEEE802.11 and Wi- to users that have been previously offered fi is used interchangeably and we will also simply to wireline users within a limited range. continue with the same convention in this The newest and the emerging standards fix particular paper. A regular WLAN network is technology issues or add functionality to the associated with an Access Point (AP) in the centre existing IEEE 802.11 standards and will be and numerous stations (STAs) are connected to this central Access Point (AP).There are just two expected to overcome many of the current modes in which communication normally takes standing problems with IEEE 802.11. place. Keywords: Wireless Communications, IEEE Within the centralized mode of communication, 802.11, WLAN, Wi-fi. communication to/from a STA is actually carried across by the APs. There's also a decentralized 1. Introduction mode in which communication between two STAs The wireless broadband technologies were can happen directly without the requirement developed with the objective of providing services associated with an AP in an ad hoc fashion. -

Notes-Cn-Unit-3
UNIT –0 3 ALOHA Unit-03/Lecture-01/ Lecture-02 Static Channel Allocation in LANs and MANs[RGPV/Jun 2010, Jun2014] Frequency Division Multiplexing - Frequency of one channel divided (usually evenly) among n users. Each user appears to have full channel of full frequency/n. Wastes bandwidth when user has nothing to send or receive, which is often the case in data communications. Other users cannot take advantage of unused bandwidth. Time Division Multiplexing - Time of one channel divided (usually evenly) among n users. Each user appears to have full channel for time/n. same problems as FDM. Analysis of Static Channel Allocation - Static allocation is intuitively a bad idea when considering that for an n divisions of a channel, any one user is limited to only 1/n channel bandwidth whether other users where accessing the channel or not. By limiting a user to only a fraction of the available channel, the delay to the user is increased over that if the entire channel were available. Intuitively, static allocation results in restricting one user to one channel even when other channels are available. Consider the following two diagrams, each with one user wanting to transmit 400 bits over a 1 bit per second channel. The left diagram would have a delay 4 times greater than the diagram on the right, delaying 400 seconds using 1 channel versus 100 second delay using the 4 channels. Static Allocation Dynamic Allocation One user with entire channel 1 channel per user up to 4 channels per user Generally we want delay to be small. -
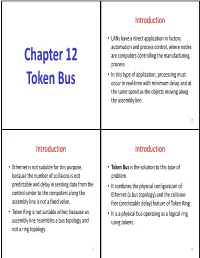
Token Bus Occur in Real‐Time with Minimum Delay, and at the Same Speed As the Objects Moving Along the Assembly Line
Introduction • LANs have a direct application in factory automation and process control, where nodes are computers controlling the manufacturing Chap ter 12 process. • In this type of application, processing must Token Bus occur in real‐time with minimum delay, and at the same speed as the objects moving along the assembly line. 2 Introduction Introduction • Ethernet is not suitable for this purpose, • Token Bus is the solution to this type of because the number of collisions is not problem. predictable and delay in sending data from the • It combines the physical configuration of control center to the computers along the Ethernet (a bus topology) and the collision‐ assembly line is not a fixed value. free (predictable delay) feature of Token Ring. • Token Ring is not suitable either, because an • It is a physical bus operating as a logical ring assembly line resembles a bus topology and using tokens. not a ring topology. 3 4 Figure 12-1 Physical Versus Logical Topology A Token Bus Network • The logical ring is formed based on the physical address of the stations in descending order. • Each station considers the station with the immediate lower address as the next station and the station with the immediate higher address as the previous station. • The station with the lowest address considers the station with the highest address the next station, and the station with the highest address considers the station with the lowest address the previous station. 5 6 Token Passing Token Passing • To control access to the shared medium, a • After sending all its frames or after the time small token frame circulates from station to period expires (whichever comes first), the station in the logical ring. -

Real-Time Communication Protocols: an Overview∗
Real-time communication protocols: an overview∗ Ferdy Hanssen and Pierre G. Jansen October 2003 Abstract This paper describes several existing data link layer protocols that provide real-time capabilities on wired networks, focusing on token-ring and Carrier Sense Multiple Access based networks. Existing modifications to provide better real-time capabilities and performance are also described. Finally the pros and cons regarding the At-Home Anywhere project are discussed. 1 Introduction In the past twenty-five years several different, wired networks have been designed and built. But not all of them are dependable, i.e. suitable for accomodating real-time traffic, or traffic with Quality of Service (QoS) requirements. Some were designed with QoS in mind, some had QoS added as an after-thought, and some do not support QoS requirements at all. The most popular wired network architecture used to date, IEEE 802.3 [46], pop- ularly called Ethernet1, does not provide any support for real-time traffic. There are no provisions to reserve bandwidth for a certain connection. Nodes access the network using the CSMA/CD (Carrier Sense Multiple Access with Collision Detect) technique [70]. The CSMA/CD algorithm does not define a collision resolvance protocol of its own. Ethernet uses the BEB (Binary Exponential Back-Off) algo- rithm. This algorithm resolves collisions in a non-deterministic manner, while the first requirement for a network to be called real-time is determinism. The most popular real-time network architecture, Asynchronous Transfer Mode (ATM), is used mostly for internetwork links these days. ATM provides high band- widths and QoS guarantees, but has proven to be too expensive for use as a lo- cal area network. -

Dissecting Industrial Control Systems Protocol for Deep Packet Inspection
Dissecting Industrial Control Systems Protocol for Deep Packet Inspection Abstract - The nation's critical infrastructures, such as avenues that can be pursued as extensions to this seminal those found in industrial control systems (ICS), are work. increasingly at risk and vulnerable to internal and external threats. One of the traditional ways of 2 Industrial Control System Protocols controlling external threats is through a network device Industrial control system protocols range from wired to called a firewall. However, given that the payload for wireless. Wired protocols include Ethernet/IP, Modbus, controlling the ICS is usually encapsulated in other Modbus/TCP, Distributed Network Protocol version3 protocols, the tendency is for the firewall to allow (DNP3), PROFIBUS, CANOpen, and DeviceNet. The packets that appear to be innocuous. These seemingly wireless variety include WirelessHART, 802.15 harmless packets can be carriers for sinister attacks that (Bluetooth), 802.16 (Broadband) and Zigbee. Some of are buried deep into the payload. The purpose of this these protocols are briefly described in the following paper is to present the different ICS protocol header subsections. signatures for the purpose of devising deep packet inspection strategies that can be implemented in network firewalls. 2.1 DNP3 The Distributed Network Protocol Version 3 (DNP 3.0) Keywords: Industrial Control Systems (ICS), Network is a protocol standard to define communications between Protocols, Deep Packet Inspection, Firewall, Intrusion Remote Terminal Units (RTU), master stations, and Intelligent Electronic Devices (IEDs). It was originally a Prevention, SCADA. proprietary model developed by Harris Controls Division and designed for SCADA systems. DNP 3.0 is an open 1 Introduction protocol standard and is an accepted standard by the The nation's critical infrastructures, such as those found electric, oil & gas, waste/water, and security industries in industrial control systems (ICS), are increasingly at [Clarke, Reynders & Wright, 2004]. -

Implementation of MIMO-OFDM System for Wimax
Degree Project Implementation of MIMO-OFDM System for WiMAX Muhammad Atif Gulzar Rashid Nawaz Devendra Thapa 2011-06-07 Subject: Electrical Engineering Level: Master Course code: 5ED06E Abstract Error free transmission is one of the main aims in wireless communications. With the increase in multimedia applications, large amount of data is being transmitted over wireless communications. This requires error free transmission more than ever and to achieve error free transmission multiple antennas can be implemented on both stations i.e. base station and user terminal with proper modulation scheme and coding technique. The 4th generation of wireless communications can be attained by Multiple-Input Multiple-Output (MIMO) in combination with Orthogonal Frequency Division Multiplexing (OFDM). MIMO multiplexing (spatial multiplexing) and diversity (space time coding) having OFDM modulation scheme are the main areas of focus in our thesis study. MIMO multiplexing increases a network capacity by splitting a high signal rate into multiple lower rate streams. MIMO allows higher throughput, diversity gain and interference reduction. It also fulfills the requirement by offering high data rate through spatial multiplexing gain and improved link reliability due to antenna diversity gain. Alamouti Space Time Block Code (STBC) scheme is used with orthogonal designs over multiple antennas which showed simulated results are identical to expected theoretical results. With this technique both Bit Error Rate (BER) and maximum diversity gain are achieved by increasing number of antennas on either side. This scheme is efficient in all the applications where system capacity is limited by multipath fading. Keywords: Multiple-Input Multiple-Output (MIMO), Orthogonal Frequency Division Multiplexing (OFDM), Space Time Block Code (STBC), Bit Error Rate (BER), Multipath Fading. -

Low Power QC-LDPC Decoder Based on Token Ring Architecture
energies Article Low Power QC-LDPC Decoder Based on Token Ring Architecture Mateusz Kuc * , Wojciech Sułek and Dariusz Kania Faculty of Automatic Control, Electronics and Computer Science, Silesian University of Technology, ul. Akademicka 16, 44-100 Gliwice, Poland; [email protected] (W.S.); [email protected] (D.K.) * Correspondence: [email protected] Received: 5 November 2020; Accepted: 26 November 2020; Published: 30 November 2020 Abstract: The article presents an implementation of a low power Quasi-Cyclic Low-Density Parity-Check (QC-LDPC) decoder in a Field Programmable Gate Array (FPGA) device. The proposed solution is oriented to a reduction in dynamic energy consumption. The key research concepts present an effective technology mapping of a QC-LDPC decoder to an LUT-based FPGA with many limitations. The proposed decoder architecture uses a distributed control system and a Token Ring processing scheme. This idea helps limit the clock skew problem and is oriented to clock gating, a well-established concept for power optimization. Then the clock gating of the decoder building blocks allows for a significant reduction in energy consumption without deterioration in other parameters of the decoder, particularly its error correction performance. We also provide experimental results for decoder implementations with different QC-LDPC codes, indicating important characteristics of the code parity check matrix, for which an energy-saving QC-LDPC decoder with the proposed architecture can be designed. The experiments are based on implementations in the Intel Cyclone V FPGA device. Finally, the presented architecture is compared with the other solutions from the literature. Keywords: LDPC; QC-LDPC; FPGA; Min-Sum; distributed control system; token ring; partially-parallel decoder 1. -

Technologies and Approaches for Meeting the Demand for Wireless Data Using Licence Exempt Spectrum to 2022
Technologies and approaches for meeting the demand for wireless data using licence exempt spectrum to 2022 Final Report Final Report to Ofcom, January 2013 Contributors Steve Methley, Pau Salsas(Europe Economics) Quotient Associates Limited Compass House, Vision Park, Chivers Way, Histon, Cambridge, CB24 9AD, UK EMAIL [email protected] WEB www.QuotientAssociates.com Europe Economics Chancery House, 53-64 Chancery Lane London, WC2A 1QU Version 01 Status Approved Licence Exempt Study 2022 | Contributors Final Report : qa980 © Quotient Associates Ltd. 2013 Commercial in Confidence. No part of the contents of this document may be disclosed, used or reproduced in any form, or by any means, without the prior written consent of Quotient Associates Ltd. ii Contents 0 Executive Summary 6 1 Future wireless data applications 11 1.1 Introduction 11 1.1.1 Previous Ofcom licence exempt work 11 1.2 Licence exempt usage today - review 12 1.3 Future challenges in demand 14 1.4 Wireless broadband applications 14 1.4.1 Broadband data growth 14 1.4.2 Indoor wireless broadband 17 1.4.3 Outdoor wireless broadband 18 1.4.4 Rural broadband 19 1.4.5 Wireless backhaul 19 1.5 Sector specific applications 20 1.5.1 Smarts, Internet of Things, M2M 20 1.5.2 Intelligent mobility 26 1.5.3 Connected health 26 1.5.4 Entertainment 27 1.5.5 Wireless sensor networks 28 1.5.6 Further specific applications 28 1.6 Consolidated key application groups 28 2 Technologies 30 2.1 Introduction 30 2.2 Communications technologies 31 2.2.1 Wi-Fi and IEEE 802.11 31 2.2.2 Wireless video technologies 35 2.2.3 Bluetooth 36 2.2.4 ZigBee and IEEE 802.15.4 37 2.2.5 White space devices 38 2.2.6 Mesh networks 40 Licence Exempt Study 2022 | Contents Final Report : qa980 © Quotient Associates Ltd. -

Abcs of Z/OS System Programming Volume 4
Front cover ABCs of z/OS System Programming Volume 4 SNA, TCP/IP, Hardware interfaces, Enterprise Extender Routing, Parallel Sysplex, Operations TCP/IP applications, Security Paul Rogers ibm.com/redbooks International Technical Support Organization ABCs of z/OS System Programming Volume 4 February 2011 SG24-6984-00 Note: Before using this information and the product it supports, read the information in “Notices” on page vii. First Edition (February 2011) This edition applies to version 1 release 12 modification 0 of IBM z/OS (product number 5694-A01) and to all subsequent releases and modifications until otherwise indicated in new editions. © Copyright International Business Machines Corporation 2011. All rights reserved. Note to U.S. Government Users Restricted Rights -- Use, duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp. Contents Notices . vii Trademarks . viii Preface . ix The author who wrote this book . .x Now you can become a published author, too! . .x Comments welcome. .x Stay connected to IBM Redbooks . xi Chapter 1. Introducing z/OS Communications Server. 1 1.1 Communications Server overview. 2 1.2 Features and benefits . 4 1.3 Communications Server overview. 6 1.4 Communications Server protocols . 8 1.5 Communications Server functional overview . 10 1.6 System z physical interfaces. 12 1.7 System z connectivity overview . 14 1.8 VTAM and TCP/IP in Communications Server for z/OS . 16 Chapter 2. VTAM concepts for SNA networks . 19 2.1 SNA implementation and concepts . 20 2.2 VTAM nodes types . 22 2.3 SNA subarea network . 24 2.4 An APPN network . -
Media Access Control (MAC) (With Some IEEE 802 Standards)
Department of Computer and IT Engineering University of Kurdistan Computer Networks I Media Access Control (MAC) (with some IEEE 802 standards) By: Dr. Alireza Abdollahpouri Media Access Control Multiple access links There is ‘ collision ’ if more than one node sends at the same time only one node can send successfully at a time 2 Media Access Control • When a "collision" occurs, the signals will get distorted and the frame will be lost the link bandwidth is wasted during collision • Question: How to coordinate the access of multiple sending and receiving nodes to the shared link ? • Solution: We need a protocol to determine how nodes share channel Medium Access control (MAC) protocol • The main task of a MAC protocol is to minimize collisions in order to utilize the bandwidth by: - Determining when a node can use the link (medium) - What a node should do when the link is busy - What the node should do when it is involved in collision 3 Ideal Multiple Access Protocol 1. When one node wants to transmit, it can send at rate R bps, where R is the channel rate. 2. When M nodes want to transmit, each can send at average rate R/M (fair) 3. fully decentralized: - No special node to coordinate transmissions - No synchronization of clocks, slots 4. Simple Does not exist!! 4 Three Ways to Share the Media Channel partitioning MAC protocols: • Share channel efficiently and fairly at high load • Inefficient at low load: delay in channel access, 1/N bandwidth allocated even if only 1 active node! “Taking turns” protocols • Eliminates empty slots without