Compiler and Runtime Techniques for Optimizing Dynamic Scripting Languages
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 1 Introduction to Computers, Programs, and Java
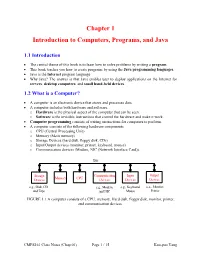
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • The central theme of this book is to learn how to solve problems by writing a program . • This book teaches you how to create programs by using the Java programming languages . • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers , desktop computers , and small hand-held devices . 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Computer programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Bus Storage Communication Input Output Memory CPU Devices Devices Devices Devices e.g., Disk, CD, e.g., Modem, e.g., Keyboard, e.g., Monitor, and Tape and NIC Mouse Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. CMPS161 Class Notes (Chap 01) Page 1 / 15 Kuo-pao Yang 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. -

Cross-Platform Language Design
Cross-Platform Language Design THIS IS A TEMPORARY TITLE PAGE It will be replaced for the final print by a version provided by the service academique. Thèse n. 1234 2011 présentée le 11 Juin 2018 à la Faculté Informatique et Communications Laboratoire de Méthodes de Programmation 1 programme doctoral en Informatique et Communications École Polytechnique Fédérale de Lausanne pour l’obtention du grade de Docteur ès Sciences par Sébastien Doeraene acceptée sur proposition du jury: Prof James Larus, président du jury Prof Martin Odersky, directeur de thèse Prof Edouard Bugnion, rapporteur Dr Andreas Rossberg, rapporteur Prof Peter Van Roy, rapporteur Lausanne, EPFL, 2018 It is better to repent a sin than regret the loss of a pleasure. — Oscar Wilde Acknowledgments Although there is only one name written in a large font on the front page, there are many people without which this thesis would never have happened, or would not have been quite the same. Five years is a long time, during which I had the privilege to work, discuss, sing, learn and have fun with many people. I am afraid to make a list, for I am sure I will forget some. Nevertheless, I will try my best. First, I would like to thank my advisor, Martin Odersky, for giving me the opportunity to fulfill a dream, that of being part of the design and development team of my favorite programming language. Many thanks for letting me explore the design of Scala.js in my own way, while at the same time always being there when I needed him. -
Language Translators
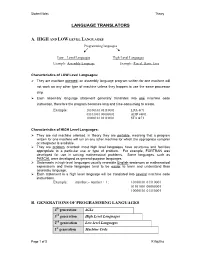
Student Notes Theory LANGUAGE TRANSLATORS A. HIGH AND LOW LEVEL LANGUAGES Programming languages Low – Level Languages High-Level Languages Example: Assembly Language Example: Pascal, Basic, Java Characteristics of LOW Level Languages: They are machine oriented : an assembly language program written for one machine will not work on any other type of machine unless they happen to use the same processor chip. Each assembly language statement generally translates into one machine code instruction, therefore the program becomes long and time-consuming to create. Example: 10100101 01110001 LDA &71 01101001 00000001 ADD #&01 10000101 01110001 STA &71 Characteristics of HIGH Level Languages: They are not machine oriented: in theory they are portable , meaning that a program written for one machine will run on any other machine for which the appropriate compiler or interpreter is available. They are problem oriented: most high level languages have structures and facilities appropriate to a particular use or type of problem. For example, FORTRAN was developed for use in solving mathematical problems. Some languages, such as PASCAL were developed as general-purpose languages. Statements in high-level languages usually resemble English sentences or mathematical expressions and these languages tend to be easier to learn and understand than assembly language. Each statement in a high level language will be translated into several machine code instructions. Example: number:= number + 1; 10100101 01110001 01101001 00000001 10000101 01110001 B. GENERATIONS OF PROGRAMMING LANGUAGES 4th generation 4GLs 3rd generation High Level Languages 2nd generation Low-level Languages 1st generation Machine Code Page 1 of 5 K Aquilina Student Notes Theory 1. MACHINE LANGUAGE – 1ST GENERATION In the early days of computer programming all programs had to be written in machine code. -

Blossom: a Language Built to Grow
Macalester College DigitalCommons@Macalester College Mathematics, Statistics, and Computer Science Honors Projects Mathematics, Statistics, and Computer Science 4-26-2016 Blossom: A Language Built to Grow Jeffrey Lyman Macalester College Follow this and additional works at: https://digitalcommons.macalester.edu/mathcs_honors Part of the Computer Sciences Commons, Mathematics Commons, and the Statistics and Probability Commons Recommended Citation Lyman, Jeffrey, "Blossom: A Language Built to Grow" (2016). Mathematics, Statistics, and Computer Science Honors Projects. 45. https://digitalcommons.macalester.edu/mathcs_honors/45 This Honors Project - Open Access is brought to you for free and open access by the Mathematics, Statistics, and Computer Science at DigitalCommons@Macalester College. It has been accepted for inclusion in Mathematics, Statistics, and Computer Science Honors Projects by an authorized administrator of DigitalCommons@Macalester College. For more information, please contact [email protected]. In Memory of Daniel Schanus Macalester College Department of Mathematics, Statistics, and Computer Science Blossom A Language Built to Grow Jeffrey Lyman April 26, 2016 Advisor Libby Shoop Readers Paul Cantrell, Brett Jackson, Libby Shoop Contents 1 Introduction 4 1.1 Blossom . .4 2 Theoretic Basis 6 2.1 The Potential of Types . .6 2.2 Type basics . .6 2.3 Subtyping . .7 2.4 Duck Typing . .8 2.5 Hindley Milner Typing . .9 2.6 Typeclasses . 10 2.7 Type Level Operators . 11 2.8 Dependent types . 11 2.9 Hoare Types . 12 2.10 Success Types . 13 2.11 Gradual Typing . 14 2.12 Synthesis . 14 3 Language Description 16 3.1 Design goals . 16 3.2 Type System . 17 3.3 Hello World . -

Complete Code Generation from UML State Machine
Complete Code Generation from UML State Machine Van Cam Pham, Ansgar Radermacher, Sebastien´ Gerard´ and Shuai Li CEA, LIST, Laboratory of Model Driven Engineering for Embedded Systems, P.C. 174, Gif-sur-Yvette, 91191, France Keywords: UML State Machine, Code Generation, Semantics-conformance, Efficiency, Events, C++. Abstract: An event-driven architecture is a useful way to design and implement complex systems. The UML State Machine and its visualizations are a powerful means to the modeling of the logical behavior of such an archi- tecture. In Model Driven Engineering, executable code can be automatically generated from state machines. However, existing generation approaches and tools from UML State Machines are still limited to simple cases, especially when considering concurrency and pseudo states such as history, junction, and event types. This paper provides a pattern and tool for complete and efficient code generation approach from UML State Ma- chine. It extends IF-ELSE-SWITCH constructions of programming languages with concurrency support. The code generated with our approach has been executed with a set of state-machine examples that are part of a test-suite described in the recent OMG standard Precise Semantics Of State Machine. The traced execution results comply with the standard and are a good hint that the execution is semantically correct. The generated code is also efficient: it supports multi-thread-based concurrency, and the (static and dynamic) efficiency of generated code is improved compared to considered approaches. 1 INTRODUCTION Completeness: Existing tools and approaches mainly focus on the sequential aspect while the concurrency The UML State Machine (USM) (Specification and of state machines is limitedly supported. -

Chapter 1 Introduction to Computers, Programs, and Java
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers, desktop computers, and small hand-held devices. 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Memory Disk, CD, and Storage Input Keyboard, Tape Devices Devices Mouse CPU Modem, and Communication Output Monitor, NIC Devices Devices Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. • The CPU usually has two components: a control Unit and Arithmetic/Logic Unit. • The control unit coordinates the actions of the other components. • The ALU unit performs numeric operations (+ - / *) and logical operations (comparison). • The CPU speed is measured by clock speed in megahertz (MHz), with 1 megahertz equaling 1 million pulses per second. -

Distributive Disjoint Polymorphism for Compositional Programming
Distributive Disjoint Polymorphism for Compositional Programming Xuan Bi1, Ningning Xie1, Bruno C. d. S. Oliveira1, and Tom Schrijvers2 1 The University of Hong Kong, Hong Kong, China fxbi,nnxie,[email protected] 2 KU Leuven, Leuven, Belgium [email protected] Abstract. Popular programming techniques such as shallow embeddings of Domain Specific Languages (DSLs), finally tagless or object algebras are built on the principle of compositionality. However, existing program- ming languages only support simple compositional designs well, and have limited support for more sophisticated ones. + This paper presents the Fi calculus, which supports highly modular and compositional designs that improve on existing techniques. These im- provements are due to the combination of three features: disjoint inter- section types with a merge operator; parametric (disjoint) polymorphism; and BCD-style distributive subtyping. The main technical challenge is + Fi 's proof of coherence. A naive adaptation of ideas used in System F's + parametricity to canonicity (the logical relation used by Fi to prove co- herence) results in an ill-founded logical relation. To solve the problem our canonicity relation employs a different technique based on immediate substitutions and a restriction to predicative instantiations. Besides co- herence, we show several other important meta-theoretical results, such as type-safety, sound and complete algorithmic subtyping, and decidabil- ity of the type system. Remarkably, unlike F<:'s bounded polymorphism, + disjoint polymorphism in Fi supports decidable type-checking. 1 Introduction Compositionality is a desirable property in programming designs. Broadly de- fined, it is the principle that a system should be built by composing smaller sub- systems. -

Bs-6026-0512E.Pdf
THERMAL PRINTER SPEC BAS - 6026 1. Basic Features 1.) Type : PANEL Mounting or DESK top type 2.) Printing Type : THERMAL PRINT 3.) Printing Speed : 25mm / SEC 4.) Printing Column : 24 COLUMNS 5.) FONT : 24 X 24 DOT MATRIX 6.) Character : English, Numeric & Others 7.) Paper width : 57.5mm ± 0.5mm 8.) Character Size : 5times enlarge possible 9.) INTERFACE : CENTRONICS PARALLEL I/F SERIAL I/F 10.) DIMENSION : 122(W) X 90(D) X 129(H) 11.) Operating Temperature range : 0℃ - 50℃ 12.) Storage Temperature range : -20℃ - 70℃ 13.) Outlet Power : DC 12V ( 1.6 A )/ DC 5V ( 2.5 A) 14.) Application : Indicator, Scale, Factory automation equipments and any other data recording, etc.,, - 1 - 1) SERIAL INTERFACE SPECIFICATION * CONNECTOR : 25 P FEMALE PRINTER : 4 P CONNECTOR 3 ( TXD ) ----------------------- 2 ( RXD ) 2 2 ( RXD ) ----------------------- 1 ( TXD ) 3 7 ( GND ) ----------------------- 4 ( GND ) 5 DIP SWITCH BUAD RATE 1 2 3 ON ON ON 150 OFF ON ON 300 ON OFF ON 600 OFF OFF ON 1200 ON ON OFF 2400 OFF ON OFF 4800 ON OFF OFF 9600 OFF OFF OFF 19200 2) BAUD RATE SELECTION * PROTOCOL : XON / XOFF Type DIP SWITCH (4) ON : Combination type * DATA BIT : 8 BIT STOP BIT : 1 STOP BIT OFF: Complete type PARITY CHECK : NO PARITY * DEFAULT VALUE : BAUD RATE (9600 BPS) - 2 - PRINTING COMMAND * Explanation Command is composed of One Byte Control code and ESC code. This arrangement is started with ESC code which is connected by character & numeric code The control code in Printer does not be still in standardization (ESC Control Code). All printers have a code structure by themselves. -

What Is a Computer Program? 1 High-Level Vs Low-Level Languages
What Is A Computer Program? Scientific Computing Fall, 2019 Paul Gribble 1 High-level vs low-level languages1 2 Interpreted vs compiled languages3 What is a computer program? What is code? What is a computer language? A computer program is simply a series of instructions that the computer executes, one after the other. An instruction is a single command. A program is a series of instructions. Code is another way of referring to a single instruction or a series of instructions (a program). 1 High-level vs low-level languages The CPU (central processing unit) chip(s) that sit on the motherboard of your computer is the piece of hardware that actually executes instructions. A CPU only understands a relatively low-level language called machine code. Often machine code is generated automatically by translating code written in assembly language, which is a low-level programming language that has a relatively direcy relationship to machine code (but is more readable by a human). A utility program called an assembler is what translates assembly language code into machine code. In this course we will be learning how to program in MATLAB, which is a high-level programming language. The “high-level” refers to the fact that the language has a strong abstraction from the details of the computer (the details of the machine code). A “strong abstraction” means that one can operate using high-level instructions without having to worry about the low-level details of carrying out those instructions. An analogy is motor skill learning. A high-level language for human action might be drive your car to the grocery store and buy apples. -

Cormac Flanagan Fritz Henglein Nate Nystrom Gavin Bierman Jan Vitek Gilad Bracha Philip Wadler Jeff Foster Tobias Wrigstad Peter Thiemann Sam Tobin-Hochstadt
PC: Amal Ahmed SC: Matthias Felleisen Robby Findler (chair) Cormac Flanagan Fritz Henglein Nate Nystrom Gavin Bierman Jan Vitek Gilad Bracha Philip Wadler Jeff Foster Tobias Wrigstad Peter Thiemann Sam Tobin-Hochstadt Organizers: Tobias Wrigstad and Jan Vitek Schedule Schedule . 3 8:30 am – 10:30 am: Invited Talk: Scripting in a Concurrent World . 5 Language with a Pluggable Type System and Optional Runtime Monitoring of Type Errors . 7 Position Paper: Dynamically Inferred Types for Dynamic Languages . 19 10:30 am – 11:00 am: Coffee break 11:00 am – 12:30 pm: Gradual Information Flow Typing . 21 Type Inference with Run-time Logs . 33 The Ciao Approach to the Dynamic vs. Static Language Dilemma . 47 12:30 am – 2:00 pm: Lunch Invited Talk: Scripting in a Concurrent World John Field IBM Research As scripting languages are used to build increasingly complex systems, they must even- tually confront concurrency. Concurrency typically arises from two distinct needs: han- dling “naturally” concurrent external (human- or software-generated) events, and en- hancing application performance. Concurrent applications are difficult to program in general; these difficulties are multiplied in a distributed setting, where partial failures are common and where resources cannot be centrally managed. The distributed sys- tems community has made enormous progress over the past few decades designing specialized systems that scale to handle millions of users and petabytes of data. How- ever, combining individual systems into composite applications that are scalable—not to mention reliable, secure, and easy to develop maintain—remains an enormous chal- lenge. This is where programming languages should be able to help: good languages are designed to facilitate composing large applications from smaller components and for reasoning about the behavior of applications modularly. -

Chapter 1 Basic Principles of Programming Languages
Chapter 1 Basic Principles of Programming Languages Although there exist many programming languages, the differences among them are insignificant compared to the differences among natural languages. In this chapter, we discuss the common aspects shared among different programming languages. These aspects include: programming paradigms that define how computation is expressed; the main features of programming languages and their impact on the performance of programs written in the languages; a brief review of the history and development of programming languages; the lexical, syntactic, and semantic structures of programming languages, data and data types, program processing and preprocessing, and the life cycles of program development. At the end of the chapter, you should have learned: what programming paradigms are; an overview of different programming languages and the background knowledge of these languages; the structures of programming languages and how programming languages are defined at the syntactic level; data types, strong versus weak checking; the relationship between language features and their performances; the processing and preprocessing of programming languages, compilation versus interpretation, and different execution models of macros, procedures, and inline procedures; the steps used for program development: requirement, specification, design, implementation, testing, and the correctness proof of programs. The chapter is organized as follows. Section 1.1 introduces the programming paradigms, performance, features, and the development of programming languages. Section 1.2 outlines the structures and design issues of programming languages. Section 1.3 discusses the typing systems, including types of variables, type equivalence, type conversion, and type checking during the compilation. Section 1.4 presents the preprocessing and processing of programming languages, including macro processing, interpretation, and compilation. -

User's Guide and Reference
IBM Compiler and Library for REXX on IBM Z Version 1 Release 4 User’s Guide and Reference IBM SH19-8160-06 Note Before using this information and the product it supports, be sure to read the general information under Appendix G, “Notices,” on page 267. Seventh Edition, August 2013 This edition applies to version 1 release 4 of IBM Compiler for REXX on IBM Z (product number 5695-013) and the IBM Library for REXX on IBM Z (product number 5695-014), and to all subsequent releases and modifications until otherwise indicated in new editions. This edition replaces SH19-8160-04. © Copyright International Business Machines Corporation 1991, 2013. US Government Users Restricted Rights – Use, duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp. Contents About This Book..................................................................................................xix How to Read the Syntax Notation............................................................................................................. xix How This Book Is Organized..................................................................................................................... xix How to Send Your Comments.................................................................................................................... xx What's New in Release 4..................................................................................... xxi IBM Compiler for REXX on IBM Z..............................................................................................................xxi