Research on Guidance Devices for the Blind
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lawrence Berkeley National Laboratory Recent Work
Lawrence Berkeley National Laboratory Recent Work Title TESTING TECHNIQUES USED IN THE QUALITY SELECTION OF RCA 6810 MULTIPLIER PHOTOTUBES Permalink https://escholarship.org/uc/item/5jv0v3kb Author Kirsten, Frederick A. Publication Date 1956-10-16 eScholarship.org Powered by the California Digital Library University of California UNIVERSITY OF CALIFORNIA ' TWO-WEEK LOAN COPY This is a Library Circulating Copy which may be borrowed for two weeks. For a personal retention copy, call Tech. Info. Diuision, Ext. 5545 BERKELEY, CALIFORNIA DISCLAIMER This document was prepared as an account of work sponsored by the United States Government. While this document is believed to contain correct information, neither the United States Government nor any agency thereof, nor the Regents of the University of California, nor any of their employees, makes any warranty, express or implied, or assumes any legal responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by its trade name, trademark, manufacturer, or otherwise, does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or the Regents of the University of California. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof or the Regents of the University of California. · UCRL- 3430(rev.) Engineering Distribution UNIVERSITY OF CALIFORNIA Radiation Laboratory Berkeley,. California Contract No. W -7405-eng-48 • •·l TESTING TECHNIQUES USED IN THE QUALITY SELECTION OF RCA 6810 MULTIPLIER PHOTOTUBES . -

Iii. Modern Electronic Techniques Applied to Physics and Engineering
_~__~~n~~____ I_~__ III. MODERN ELECTRONIC TECHNIQUES APPLIED TO PHYSICS AND ENGINEERING A. DESIGN AND CONSTRUCTION OF A MICROWAVE ACCELERATOR Staff: Professor J. C. Slater Professor A. F. Kip Dr. W. H. Bostick R. J. Debs P. T. Demos M. Labitt L. Maier S. J. Mason I. Polk J. R. Terrall Since the last progress report, primary emphasis has been on con- struction of additional lengths of accelerating cavity and the associated equipment necessary for operation. Primary design work has been finished on all components necessary for operation of the accelerator and most com- ponents are in the process of being assembled. The following items include recent developments and design details which have not been mentioned earlier. Delivery on the 2-Mev Van de Graaff machine is expected at an early date. A pulsing circuit to modulate the electron beam from the Van de Graaff machine has been designed and built. Since this circuit is to be placed in the dome of the machine at high pres- sure, all component parts have been subjected to 400 lb/in2 pressure to ensure that they have the necessary strength. Machining work on the one-foot accelerator sections is essentially completed. Assembly and brazing of the parts are now in progress. The final design for the 20-foot accelerator tube has been slightly modified in that it has been divided into three sections which are isolated from each other rf-wise by short drift tubes which act as waveguides beyond cut-off. The primary purpose of this procedure is to allow for tuning each section to optimum frequency independently. -
7.4 UV, Visible and Near IR Detectors
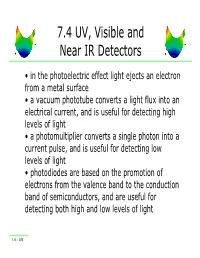
7.4 UV, Visible and Near IR Detectors • in the photoelectric effect light ejects an electron from a metal surface • a vacuum phototube converts a light flux into an electrical current, and is useful for detecting high levels of light • a photomultiplier converts a single photon into a current pulse, and is useful for detecting low levels of light • photodiodes are based on the promotion of electrons from the valence band to the conduction band of semiconductors, and are useful for detecting both high and low levels of light 7.4 : 1/8 Photoelectric Effect • because metals contain free electrons they can absorb UV, visible, and near IR radiation • if the energy of the absorbed photon is greater than the ______ ________ of the metal, an electron is ejected into the vacuum • the energy of the photon equals the work function of the metal plus the kinetic energy of the electron hc1 hc =+mv2 ωλ = λ 2 0 ω where ω is the work function, and λ0 is the wavelength that just barely ejects an electron • alkali metals are commonly used in detectors metal Li Na K Rb Cs ω 2.9 eV 2.75 2.3 2.16 2.14 λ0 428 nm 451 539 574 579 • mixtures of alkali metals can give λ0 as high as ______ nm • because __________ energy can combine with optical energy, the onset of photo-ejection is gradual 7.4 : 2/8 Vacuum Phototube A metallic surface with a low work function is placed inside an evacuated tube. When light interacts with the metal, electrons are photo-ejected. -

A Relatively Simple Device for Recording Radiation Intensities in The
A RELATIVELY SIMPLE DEVICE FOR RECORDING RADIATION INTENSITIES IN HE ULTRAVIOLET PORTION OF THE SPECTRUM by HENRY WALLACE HENDRICKS A THESIS submitted to OREGON STATE COLLEGE in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE June 19S0 APPROVED: Professor of Physics In Charge of Major Chairman of School Graduate Committee Dean of Graduate School ACKN OWLEDGMENT Sincere appreciation and thanks are expressed to Dr. Weniger for his interest and assistance in the preparation of this thesis. TABLE OF CONThNTS a ge I NTROD[JCTION . ..... , . i Statement of . Problem . i Some Basic Information about Ultraviolet, Sun and Sky Radiation, Its Biological Etc. Effectiveness, . 1 INSTRUMLNTS FOR RECORDING ULTRAVIOLET INTENSITIES . 3 DESIGNOONSIDERATIONS. ... .. .. The R e e e i y e . r ....... The . Receiving Circuit . 9 The R e c o e . rd r . 9 . ThePowerSupply . .10 EX>ERIMENTAL . 1)EVELOPMENT . 11 THE FINAL CIRCUIT AND . 7OER SUPPLY . 16 PREPARATION AND SILVERING OF THE QUARTZ PLATES . 20 THERECEIVERUNIT..................23 TESTOFAPPARATtJS . .26 Adjustment8 . 26 Results and Conclusions . 27 . Data . 3]. BILIOGRAPHY . 37 LIST OF ILLUBTRATIONS Figure Page J. Spectral Sensitivfty of the S Photocathode 6 2 OriginalCircuit . 12 3 First Vacuum Tube Circuit . 12 Lj. Variation of the Counts per Minute with Filament Voltage . 11i The Final Circuit . ........ 17 6 The Power Suoply, Counter and Receiver . 22 The 7 Receiver ............... 2)4. 8 Step-diagram from Data ObtaIned on MaylO,l9O ............. 28 9 Step-diagram from Data Obtained on Mayll,l9O ............. 29 10 Step-diagram from Data Obtained on Mayl2,l95O ......... .. 30 A RELATIVELY SIMPLE DEVICE FOR RECORDING RADIATION .LNTENSITIES IN T}IE ULTRAVIOLET PORTION OF THE SPECTRUM INTRODUCTION Statement of Problem The purpose of this thesis is to develop a more or less portable aiaratua that will measure ultraviolet energy in or near the erythemal region. -
Controlled Dynamics of Laser-Cooled Ions in a Penning Trap
Controlled Dynamics of Laser-Cooled Ions in a Penning Trap Eoin Seymour Gwyn Phillips December 2004 Thesis submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy of the University of London and for the Diploma of Imperial College Abstract I report on a scheme for improved control over the motion of small numbers of laser-cooled ions in a Penning trap. This work is part of a larger project to assess the suitability of the Penning trap for quantum information processing (QIP). Laser cooling of ions in this type of trap is complicated by large Zeeman shifts of the cooling- and repumping-transition wavelengths from those in zero mag- netic field. Lasers can not, therefore, be tuned to the unshifted atomic spectral lines using an external reference such as a hollow-cathode lamp. In order to address this difficulty I built a wavemeter with a precision of one part in 107 for direct tuning of the lasers to the transition wavelengths. It was also necessary to improve the laser-frequency stabilities by building reference cavities to which they could be locked. In evaluating the suitability of the Penning trap for QIP, one must address the poor localisation of the ions due to the difficulty in cool- ing one of the radial motions: the magnetron motion. I have implemented a technique called axialisation that reduces this motion's amplitude by coupling it to the other radial motion: the modified cyclotron motion, which is efficiently laser-cooled. This was done with small clouds of magnesium ions and later with small clouds of calcium ions. -

Master Product Fisting
Richardson "' Electronics, Ltd. Master Product fisting Part #and Description Guide • Electron Tubes • Semiconductors r Electron Tubes Part Description Part # Description Part # Description LCMG-B X-Ray Tube 2AS15A Receiving Rectifier QB3.5/750GA Power Tetrode QEL1/150 Power Tetrode 2AV2 Receiving Tube 6163.5/750/6156 Power Tetrode CCS-1/Y799 CC Power Tetrode 2822 Planar Diode QBL3.5/2000 Power Triode PE1/100/6083 Power Pentode 2B35/EA50 UHF Diode W3/2GC TWi C1A Thyratron 2694 Twin Tetrode W3/2GR TWi GV1A-1650 Corona Voltage Reg 2BU2/2AS2A/2AH2 Receiving Tube 61QV03/20A UHF Twin Tetrode CE1A/B Phototube 2C36 UHF Triode QQE03/20/6252 UHF Twin Tetrode 1A3/DA90 Mini HF Diode 2C39A Planar Triode QQE03/12/6360A Twin Tetrode 1AD2A/1BY2 Receiving Tube 2C39BA Planar Triode OE3/85A1 Voltage Regulator C1 B/3C31 /5664 Thyratron 2C39WA Planar Triode OG3/85A2 MIN Volt Regulator 1B3GT/1 G3GT Receiving Tube 2C40A Planar Triode QB3/200 Power Tetrode 1B35A ATR Tube 2C43 Planar Triode QB3/300 Power Tetrode 1658A TR Tube 2C51/396A MIN Twin Triode QB3/300GA Power Tetrode 1859/R1130B Glow Modulator 2C53 High Voltage Triode T83/750 Power Triode 1B63B TR Tube 2CW4 Receiving Tube OA3NR75 Voltage Regulator 1885 Geiger-Mueller Tube 2D21 Thyratron OB3NR90 Voltage Regulator 1BQ2IDY802 Receiving Rectifier 2D21W/5727 MIN Thyratron OC3NR105 Voltage Regulator 1C21 Cold Cathode 2D54 Receiving Tube OD3NR150 Voltage Regulator 1D21 /SN4 Cold Cathode Dischg 2E22 Pentode OB3A Receiving Tube 1G3GT/ 1B3GT Receiving Tube 2E24 Beam Amplifier OC3A Voltage Regulator 1G35P Hydrogen Thyratron 2E26 Beam Amplifier OD3A Voltage Regulator 1HSGT Recv. -

The Design and Construction of an Automatic Spectroscope a Thesis in Electrical Engineering
THE DESIGN AND CONSTRUCTION OF AN AUTOMATIC SPECTROSCOPE A THESIS IN ELECTRICAL ENGINEERING Zackie D, Reynolds Approved Texas Technological College May, 1951 Tp: DESIGN AND CQNSTEUCTION OP AN AUTOMATIC SPECTROSCOIE A THESIS IK ELECTRICAL ENGINEERING Submitted to the Faculty of the Division of Graduate Studlea of Texas Technological College in Partial Fulfillment of t^e Requirennts for the Degree of MASTER OP SCIENCE Zaokie D» Reynolda, B. S« It Lubbock, Texaa May, 1951 ACKNOTIXEDGSMENT Ihe aulhor hereby expresaea hie appreciation to the m9sft)era of his Oliesls Committee, Professors C, £• Houston, chairman, H, A. Spuhler, and v . i:. Craig, ^o have given helpful criticism and suggestions in the preparation of t^is paper* La particular, appreciation la expreaaod to Dr« Craig, Professor of Chemistry, for providing the opportunity of working on this project, for his much needed moral support, and for hia assistance in coordinating the spectrographic science with the electronic* in U TABLE OF CONTENTS Introduction •••••••••••••••• 1 1* Principls of Operation ••••• 9 2. The Spectroacope • • • • • • • • • 14 3, The Multiplier Phototube 21 4« The Power Supplies • 30 Theoretical Considerations Specific Construction Requiremonts Circuit resign The High Voltage Supply IhB / 250 Volt Supply 5* The Sequence and Timing Control •••••• 54 6. The Amplifiers • •••• 65 7* The Recordera • 76 8« Teated Operation and Suggested Improvementa 80 Bibliography • • 65 ill IHTRODUCTIOH 2 In 1666,^ Sir laaao Newton first separated white light into a band of colors with a prism* In 1814, v • H. V.oHas ten observed spectral lines, and In 1859, 0, l • Klrchhoff and R. Bunsen made the first practical spectroscope. -

RF Phototube, Optical Clock and Precise Measurements in Nuclear
Radio Frequency Phototube, Optical Clock and Precise Measurements in Nuclear Physics Amur Margaryan Yerevan Physics Institute after A.I. Alikhanian Yerevan, Armenia Abstract Recently a new experimental program of novel systematic studies of light hypernuclei using pionic decay was established at JLab (Study of Light Hypernuclei by Pionic Decay at JLab, JLab Experiment PR-08-012). The highlights of the proposed program include high precision measurements of binding energies of hypernuclei by using a high resolution pion spectrometer, HπS. The average values of binding energies will be determined within an accuracy of ~10 keV or better. Therefore, the crucial point of this program is an absolute calibration of the HπS with accuracy 10-4 or better. The merging of continuous wave laser-based precision optical-frequency metrology with mode-locked ultrafast lasers has led to precision control of the visible frequency spectrum produced by mode-locked lasers. Such a phase-controlled mode-locked laser forms the foundation of an optical clock or “femtosecond optical frequency comb (OFC) generator,” with a regular comb of sharp lines with well defined frequencies. Combination of this technique with a recently developed radio frequency (RF) phototube results in a new tool for precision time measurement. We are proposing a new time-of-flight (TOF) system based on an RF phototube and OFC technique. The proposed TOF system achieves 10 fs instability level and opens new possibilities for precise measurements in nuclear physics such as an absolute calibration of magnetic spectrometers within accuracy 10-4 - 10-5. 1. Introduction The binding energies of the Λ particle in the nuclear ground state give one of the basic pieces of information on the Λ-nucleus interaction. -

United States Patent 19 11 3,930,118 Midland Et Al
United States Patent 19 11 3,930,118 Midland et al. (45 Dec. 30, 1975 54 RADAR RECORDER SYSTEM Primary Examiner-Raymond F. Cardillo, Jr. 75) Inventors: Richard W. Midland, Arlington Attorney, Agent, or Firm-Pennie & Edmonds Heights; George S. Bayer, Long Grove; Keith H. Kreiger, Maywood, all of Ill. 57 ABSTRACT 73 Assignee: General Time Corporation, A radar recorder system is disclosed for recording and Thomaston, Conn. playing back information for a radar system. A motion 22 Filed: Apr. 24, 1973 picture camera is positioned opposite the face of the cathode ray tube (CRT) and is stepped in synchro (Under Rule 47) nism with the display on the tube each time the radar 21 Appl. No.: 353,985 sweep passes a reference such as true North. Thus, once each scan of the radar beam, a picture of the corresponding CRT display is taken by the camera. A 52 U.S. Cl............. 178/6.7 R; 178/6.7 A; 178/7.4; coder is provided for directing onto a portion of the 34315 PC exposed film information such as time, location, and 51 int. Cl......................... G01S 9/02; HO4N 5/88 other information for identifying each frame of the 58 Field of Search............... 178/6.7 R., 6.7 A, 7.4, film. A video phototube and video preamplifier are 178/7.83, 7.84, 7.87, 7.88, 7.89, DIG. 20, provided for replaying the information stored on the DIG. 28; 343/5 PC film. In a manner similar to a flying-spot scanner, the cathode ray tube scans across the film in the camera (56) References Cited with the light passing through the film being received UNITED STATES PATENTS by the video phototube which converts the sensed 2,470,912 5/1949 Best et al.......................... -

A New Approach to Direct-Reading Spectrochemical Analysis Richard Keith Brehm Iowa State College
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 1953 A new approach to direct-reading spectrochemical analysis Richard Keith Brehm Iowa State College Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Analytical Chemistry Commons Recommended Citation Brehm, Richard Keith, "A new approach to direct-reading spectrochemical analysis " (1953). Retrospective Theses and Dissertations. 13225. https://lib.dr.iastate.edu/rtd/13225 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. UNCLASSIFIED Title; A Haw Approach to Dlyeot-"Reading Speotroohewical . ^ AnaXysla. , . Author; llohard K. il^etaa (Official certification of the classification shown Is filed in the Ames Laboratory Document Library) Signature was redacted for privacy. W. E- Dreeszen Secretary to Declassification Committee UNCLASSIFIED A NEW APPROACH TO DIRECT-READING SPECTROCHEMICAL ANALYSIS by Richard Keith Brehm A Dissertation Submitted to the Graduate Faculty in Partial Fulfillment of The Requirements for the Degree of DOCTOR OF PHILOSOPHY Major Subject; Analytical Chemistry Approved: Signature was redacted for privacy. In Charge of Major Work Signature was redacted for privacy. Signature was redacted for privacy. D ege Iowa State College 1953 UMI Number: DP12594 INFORMATION TO USERS The quality of this reproduction is dependent upon the quality of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleed-through, substandard margins, and improper alignment can adversely affect reproduction. -
“Wiiu!I!L%%Iiiir COPY
LA-5250-PR PROGRESS REPORT “wiiu!i!l%%iiiir COPY @ ● Progress Report I LASL Controlled Thermonuclear Research Program for a 12-Month period Ending December 1972 10sb a Iamos scientific laboratory of the University of California LOS ALAMOS, NEW MEXICO 87544 /\ UNITED STATES ATOMIC ENERGY COMMISSION CONTRACT W-7406 -ENG. 36 This report was prepared as an account of work sponsored by the United States Government. Neither the United States nor the United States Atomic Energy Commission, nor any of their employees, nor any of their contrac- tors, subcontractors, or their employees, makes any warranty, express or im- plied, or assumes any legal liability or responsibility for the accuracy, com- pleteness or usefulness of any information, apparatus, product or process dis- closed, or represents that its use would not infringe privately owned rights. This report presents the status of the IJKL Controlled Thermonuclear Research program. Previous annual status reports in this series, all unclas- sified, are: LA-4351-MS LA-4888-PR IA-4585-MS Printed in the United States of America. Available from National Technical Information Service U. S. Department of Commerce 5285 Port Royal Road L Springfield, Virginia 22151” Price: Printed Copy !$5.45; Microfiche $0.95 . LA-5250-PR PROGRESS REPORT UC-20 ISSUED: June 1973 10 Iamos scientific laboratory of the University of California LOS ALAMOS, NEW MEXICO 87544 Progress Report LASL Controlled Thermonuclear Research Program for a 12-Month Period Ending December 1972 —. ‘--T- ~mpiled by F. L. Ribe i s. m CONTENTS I. Introduction . .. O. O.. .. O.. .O . ..O1 11. Theta-PinchProgram . 3 A. -
History of Sound Motion Pictures by Edward W Kellogg First Installment
History of Sound Motion Pictures by Edward W Kellogg First Installment History of Sound Motion Pictures by Edward W Kellogg Our thanks to Tom Fine for finding and scanning the Kellogg paper, which we present here as a “searchable image”. John G. (Jay) McKnight, Chair AES Historical Committee 2003 Dec 04 Copyright © 1955 SMPTE. Reprinted from the Journal of the SMPTE, 1955 June, pp 291...302; July, pp 356...374; and August, pp 422...437. This material is posted here with permission of the SMPTE. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the SMPTE. By choosing to view this document, you agree to all provisions of the copyright laws protecting it. FIRST INSTALLMENT History of Sound Motion Pictures By EDWARD W. KELLOGG Excellent accounts of the history of the development of sound motion pictures special construction, to provide maxi- have been published in this Journal by Theisen6 in 1941 and by Sponablee in 1947. mum volume and long playing, the The present paper restates some of the information given in those papers, supple- cylinder record was oversize, and the menting it with some hitherto unpublished material, and discusses some of the horn and diaphragm considerably larger important advances after 1930. than those of home phonographs. Be- One of the numerous omissions of topics which undeniably deserve discussion tween the reproducing stylus and the at length, is that, except for some early work, no attempt is made to cover develop- diaphragm was a mechanical power am- ments abroad.