Indian Remote Sensing Missions & Payloads
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mission/PDS Build Schedule
Mission/PDS Build Schedule Last updated 30 Oct 2017: Updated ExoMars Rover, BepiColom, Chandrayaan-2, Psyche launch dates. Updated New Horizons 2014 MU69 flyby. Updated Juno EOM. Extended active missions: Venus Climate Orbiter, Dawn, Voyager 1/2, Mars Orbiter Mission. Project Summary Extended past mission wrapping up archives: Rosetta. Changed MESSENGER, Cassini to "Past" missions. Added new missions: Hope Mars, Mars Orbiter Mission-2, Martian Moon eXplorer. Removed AIM (cancelled). a = Adoption of PDS4 release(s) PDS4 Release Version 1.7 1.8 1.9 1.10 1.11 V V V V V d = Distribution of PDS4 data Lead PDS PDS4 Release FY17 FY18 FY19 FY20 FY21 FY22 FY23 FY24 FY25 FY26 FY27 FY28 Other Nodes Status Mission Node Version Adopted 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 MAVEN ATM PPI,NAIF Active 4 1.1-1.5 d d d d d d d d d d MOI Sep 2014; Extended through Sep 2018 Mars Science Laboratory/MSL/Curiosity GEO ATM,CIS,PPI,NAIF Active 3 Extended through Sep 2018 Mars Reconnaissance Orbiter/MRO GEO ATM,CIS,NAIF Active 3 Extended through Sep 2018 Study: pre-Phase A (response to proposal request) Mars Exploration Rover/MER/Opportunity GEO ATM,CIS,NAIF Active 3 Extended through Sep 2018 Formulation: Phase A (mission and systems definition) Mars Odyssey GEO CIS,NAIF Active 3 Extended through Sep 2018 Formulation: Phase B (preliminary design) InSight GEO ATM,CIS,PPI,NAIF Future 4 1.4-1.5 (?) a a a a a a/d d d d d d d d d d Launch May 2018; Land Nov 2018 Implementation: Phase C (design) / D (build, test, -
May Art and Cuture
CURRENT AFFAIRS(2019-2020) FOR UPSC AND OTHER EXAMS MAY ART AND CUTURE By SIDDHANT AGNIHOTRI B.Sc (Silver Medalist) M.Sc (Applied Physics) Facebook: sid_Econnect CHARDHAM • Chardham Yatra: Kedarnath portals open for public.The project involves developing and widening 900-km of national highways connecting the holy Hindupilgrimage sites of; Badrinath, Kedarnath, Gangotri, and Yamunotri at an estimated cost of Rs.12,000 crores. • The highway will be called Char Dham Mahamarg(Char Dham Highway) and the highway construction project will be called as Char Dham Mahamarg Vikas Pariyojana (Char Dham Highway Development Project). • The roads will be widened from 12m to 24m and the project will involve construction of tunnels, bypasses, bridges, subways and viaducts. SEXUAL OFFENCE ISHWAR CHANDRA SAGAR • The giant statue of Ishwar Chandra was recently vandalized by some political goons in Kolkata. • He was the 19th century intellectual. He was perhaps the first Indian reformer to put forward the issues of women. • His Bengali primer, Borno Porichoy, remains, more than 125 years after his death in 1891, the introduction to the alphabet for nearly all Bengali children. • He was a polymath who reconstructed the modern Bengali alphabet and initiated pathbreaking reform in traditional upper caste Hindu society. ISHWAR CHANDRA SAGAR - REFORMS • The focus of his social reform was women — and he spent his life’s energies trying to ensure an end to the practice of child marriage and initiate widow remarriage. • He argued, on the basis of scriptures and old commentaries, in favour of the remarriage of widows in the same way as Roy did for the abolition of Sati. -
Overview of Chandrayaan-1 PDS (Planetary Data System) Products
Chandrayaan-1 PDS Data Products Archival Generation and Browse By Ajay Kumar Prashar HRDPD/SIPG Chandrayaan-1 SAC Data Processing Team Contents • ISDA (ISRO Science Data Archive) Overview • PDS (Planetary Data System) Overview • Mission & instrument Overview • Archive Process • Data Products Definitions • Data Products Archive Generation • Archive Organization : Mission & Instrument level • Visualizations of PDS Data Products (Ch1PDSViewer/NASAVIEW/USGS-ISIS) • Chandrayaan-1 Browse Application ISDA – Overview Central repository for all scientific and engineering data returned by ISRO’s planetary missions Established at Indian Space Science Data Centre (ISSDC) Bangalore - in 2008. ISDA archives data sets from following missions: Chandrayaan-1 Mars Orbiter Mission Astrosat Chandrayaan-2 (Future) ISDA adopted PDS as archive standard for generating mission & instrument specific data sets for the scientific user community ISDA provides international collaboration with IPDA (International Planetary Data Alliance) PDS - Overview Well known Archive standard for all the NASA planetary missions in the scientific user community. Adopted by ESA, JAXA and other space agencies across globe. Features of PDS Self structured, documented & Peer Review Data Sets Long-term access and usability of data ISRO had also adopted PDS3 for following missions Chandrayaan-1 Mars Orbiter Mission. ISRO will adopt PDS4 for Chandrayaan-2 and continue PDS4 for future planetary missions. PDS Home Page (http://pds.nasa.gov) Mission & Instruments – Overview Chandrayaan-1, India’s first mission to Moon, was launched successfully on 22 October 2008 from SDSC SHAR, Sriharikota. Spacecraft was orbiting around Moon at a height of 100 km from the lunar surface for chemical, mineralogical and photo-geologic mapping of the Moon. Spacecraft carried 11 scientific instruments built in India, USA, UK,Germany, Sweden and Bulgaria. -

G. Madhavan Nair - Wikipedia, the Free Encyclopedia
G. Madhavan Nair - Wikipedia, the free encyclopedia G. Madhavan Nair From Wikipedia, the free encyclopedia G. Madhavan Nair (Malayalam: ജി. മാധവ നായ) (born October 31, 1943) is the G Madhavan Nair present Chairman of Indian Space Research Organisation and Secretary to the Department of Space, Government of India since September 2003. He is also the Chairman, Space Commission and acts as the Chairman of Governing Body of the Antrix Corporation, Bangalore. Madhavan Nair was awarded the Padma Vibhushan, India's second highest civilian honour, on January 26, 2009.[1][2] Contents 1 Early life 2 Career 3 As Chairman of ISRO 4 Additional responsibilities G Madhavan Nair 5 Awards Born 31 October 1943 6 Honours Thiruvanathapuram, India 7 Fellowships/Memberships 8 Lashkar Threat Residence India 9 References Nationality Indian 10 External links Fields Rocket Technology Institutions Indian Space Research Organisation Bhabha Atomic Research Center Early life Alma mate r B.Sc. (Engineering - Electrical & Communication) (1966), College of Nair was born at Neyyattinkara near Thiruvananthapuram, Kerala, India. He also studied in his Engineering, Trivandrum early life in Kanyakumari District. He graduated with a B.Sc. in Engineering (1966) from College Known for Indian Space Program of Engineering, Thiruvananthapuram, Kerala University with specialization in Electrical & Communication Engineering. After his graduation Nair attended a training program at the Bhabha Notable Padma Bhushan (1998) awards Atomic Research Center (BARC) Training School, Mumbai. Padma Vibhushan (2009) Career Nair is a leading technologist in the field of rocket systems and has made significant contribution to the development of multi-stage satellite launch vehicles, achieving self-reliance in independent access to space using indigenous technologies. -

Overview of Sensors for Applications
OVERVIEW OF SENSORS FOR APPLICATIONS Deepak Putrevu Head, MTDD/AMHTDG EM SPECTRUM Visible 0.4-0.7μm Near infrared (NIR) 0.7-1.5μm Optical Infrared Shortwave infrared (SWIR) 1.5-3.0μm Mid-wave infrared (MWIR) 3.0-8.0μm (OIR) Region Longwave IR(LWIR)/Thermal IR(TIR) 8.0-15μm Far infrared (FIR) Beyond15μm Gamma Rays X Rays UV Visible NIR SWIR Thermal IR Microwave P-band: ~0.25 – 1 GHz Microwave Region L-band: 1 -2 GHz S-band: 2-4 GHz •Sensors are 24x365 C-band: 4-8 GHz •Signal data characteristics X-band: 8-12 GHz unique to the microwave region of the EM spectrum Ku-band: 12-18 GHz K-band: 18-26 GHz •Response is primarily governed by geometric Ka-band: 26-40 GHz structures and hence V-band: 40 - 75 GHz complementary to optical W-band: 75-110 GHz imaging mm-wave: 110 – 300GHz Basic Interactions between Electromagnetic Energy and the Earth’s Surface Incident Power reflected, ρP Reflectivity: The fractional part of the radiation, P incident radiation that is reflected by the surface. Power absorbed, αP Absorptivity: the fractional part of the = Power emitted, εP incident radiation that is absorbed by the surface. Power transmitted, τP Emissivity: The ratio of the observed flux emitted by a body or surface to that of a P= Pr + Pt + Pa blackbody under the same condition. 푃 푃 푃 푟 + 푡 + 푎 = 1 푃 푃 푃 Transmissivity: The fractional part of the ρ + τ + α =1 radiation transmitted through the medium. At thermal equilibrium, absorption and emission are the same. -

Indian Payload Capabilities for Space Missions
INDIAN PAYLOAD CAPABILITIES FOR 13, Bangalore - SPACE MISSIONS July 11 A.S. Kiran Kumar Director Space Applications Centre International ASTROD Symposium, Ahmedabad th 5 Application-specific EO payloads IMS-1(2008) RISAT-1 (2012) MX/ HySI-T C-band SAR CARTOSAT-2/2A/2B RESOURCESAT-2 (2011) (2007/2009/2010) LISS 3/ LISS 4/AWiFS PAN RESOURCESAT-1 (2003) LISS 3/ LISS 4 AWiFS CARTOSAT-1 (2005) (Operational) STEREOPAN Megha-Tropiques (2011) TES(2001) MADRAS/SAPHIR/ScARaB/ Step& Stare ROSA PAN OCEANSAT-2 (2009) OCM/ SCAT/ROSA YOUTHSAT(2011) LiV HySI/RaBIT INSAT-3A (2003) KALPANA-1 (2002) VHRR, CCD VHRR Application-specific EO payloads GISAT MXVNIR/SWIR/TIR/HySI RISAT-3 RESOURCESAT-3A/3B/3C L-band SAR CARTOSAT-3 RESOURCESAT-2A LISS 3/LISS 4/AWiFS PAN LISS3/LISS4/AWiFS RESOURCESAT-3 LISS 3/LISS 4/ CARTOSAT-2C/2D AWiFS (Planned) PAN RISAT-1R C-band SAR SARAL Altimeter/ARGOS OCEANSAT-3 OCM , TIR GISAT MXVNIR/SWIR/ INSAT- 3D TIR/HySI Imager/Sounder EARTH OBSERVATION (LAND AND WATER) RESOURCESAT-1 IMS-1 RESOURCESAT-2 RISAT-1 RESOURCESAT-2A RESOURCESAT-3 RESOURCESAT-3A/3B/3C RISAT-3 GISAT RISAT-1R EARTH OBSERVATION (CARTOGRAPHY) TES CARTOSAT-1 CARTOSAT-2/2A/2B RISAT-1 CARTOSAT-2C/2D CARTOSAT-3 RISAT-3 RISAT-1R EARTH OBSERVATION (ATMOSPHERE & OCEAN) KALPANA-1 INSAT- 3A OCEANSAT-1 INSAT-3D OCEANSAT-2 YOUTHSAT GISAT MEGHA–TROPIQUES OCEANSAT-3 SARAL Current observation capabilities : Optical Payload Sensors in Spatial Res. Swath/ Radiometry Spectral bands Repetivity/ operation Coverage (km) revisit CCD 1 1 Km India & 10 bits 3 (B3, B4, B5) 4 times/ day surround. -
State Universities Vice Chancellor & Registrar Email Id's& University
State Universities Vice Chancellor & Registrar Email Id’s& University Web Address Sl University Name Year of Vice Chancellor Email & Contacts Registrar Registrar Evaluation Web Address No Establishment 1 Prof. Dayanand Mane 1916 [email protected], Prof.R.Rajanna [email protected] www.uni-mysore.ac.in Vice Chancellor Mob: 0821-2419273(O), 0821-2419396(F) University of Mysore 0821-2419666(O)/ 0821-2419361/2419222(O), 0821- Crawford Hall, ManasaGangothri, 0821-2419200(o), 2419301(F) Mysore – 570 005 0821-2419363(F) [email protected] Universityof Mysore, Mysore Mob: 9902441898 2 Dr. B. PramodGai 1949 [email protected] Dr. Mahadev N Joshi [email protected] www.kud.ac.in Vice Chancellor Mob: 9591171725 Mob: 9449120474 0836-2447771 (O), 0836-2741928 (F) Karnataka University 0836-2215255/ 2215210/ 2448600 (O) 0836-2447750(o), 0836-2446601 (F) Pavate Nagar, 0836-2747884 (F) [email protected] Dharwad – 580 003. 3 Prof.M. Muniraju 2nd July 1964 [email protected] Prof. B.K.Ravi Dr.M.S.Reddy www.bangaloreuniversity.ac.in Vice Chancellor Mob: 9342530924 Mob: [email protected] Bangalore University 080-22961015(City), 080-22961011 080-22961012 (Camp), 080-22961016 080-22244082(City), 080-22961013 JnanaBharathi (Camp) (City) (Camp), Bangalore – 560 056. 080-22213052( F) 080-23211020 (Camp) (F), 080- Fax: 080-23214414(CITY) 22100187 (City) (F) [email protected] 4 Dr. K. Byrappa 10th Sep 1980 [email protected] Prof.K.M.Lokesh [email protected] www.mangaloreuniversity.ac.in Vice Chancellor [email protected] Mob:94499010276,9448982976 0824-2287327(O), 0824-2287452(F) Mangalore University Mob:7259667666 0824-2287276(O), 0824-2287424 (F) MangalaGangothri, 0824-2287347(O), 0824-2287367(F) [email protected] Mangalore – 574 199. -

Global Exploration Roadmap
The Global Exploration Roadmap January 2018 What is New in The Global Exploration Roadmap? This new edition of the Global Exploration robotic space exploration. Refinements in important role in sustainable human space Roadmap reaffirms the interest of 14 space this edition include: exploration. Initially, it supports human and agencies to expand human presence into the robotic lunar exploration in a manner which Solar System, with the surface of Mars as • A summary of the benefits stemming from creates opportunities for multiple sectors to a common driving goal. It reflects a coordi- space exploration. Numerous benefits will advance key goals. nated international effort to prepare for space come from this exciting endeavour. It is • The recognition of the growing private exploration missions beginning with the Inter- important that mission objectives reflect this sector interest in space exploration. national Space Station (ISS) and continuing priority when planning exploration missions. Interest from the private sector is already to the lunar vicinity, the lunar surface, then • The important role of science and knowl- transforming the future of low Earth orbit, on to Mars. The expanded group of agencies edge gain. Open interaction with the creating new opportunities as space agen- demonstrates the growing interest in space international science community helped cies look to expand human presence into exploration and the importance of coopera- identify specific scientific opportunities the Solar System. Growing capability and tion to realise individual and common goals created by the presence of humans and interest from the private sector indicate and objectives. their infrastructure as they explore the Solar a future for collaboration not only among System. -
History of the Indian Remote Sensing Programme
History of the Indian Remote Sensing Programme Ranganath Navalgund Vikram Sarabhai Distinguished Professor Indian Space Research Organisation Bangalore, India Workshop on Small Satellites & Sensor Technology for Disaster Management, Indo-US S&T Forum CANEUSMarch SSTDM 31, 2014 2014 BEGINNING Stared with the pioneering experiment of detecting Coconut Root Wilt Disease using Color Infrared Film in 1970s by Prof. P. R. Pisharoty. Jun 07,1979 Bhaskara-I (1979) and Bhaskara-II (1981) – Experimental Remote Sensing Satellites provided the Aerial view of Grove Area foundation for the operational Indian Remote Sensing Programme. Nov 20, 1981 (Coconut Root Wilt Disease Study) The Result is operational Indian Remote Sensing Programme with the launch of IRS-1A on March 17, 1988 CANEUS SSTDM 2014 DURING 1980s NRSA established Earth Station Complex at Annaram Village, Shadnagar, 59 km from Balanagar in 1979 to receive Landsat Data TERMINAL-1 (10M DIA) L & S Band 15 Mbps 1980-83: Landsat 2,3 & NOAA- 2, 3 1983-88: Landsat 5, ERS, SPOT & NOAA Today: Multimission ScenarioCANEUS - 4 SSTDMTerminals 2014 (7.5m) - upto 960Mbps EVOLUTION OF (Microwave RISAT-1 (2012) Capability) INDIAN EO SYSTEMS C Band SAR (5.35 GHz) IMS-1 (2008) (Hyperspectral HySI Sensor (64 bands, 506 m) Capability) TWSAT-MX (4 bands, 37 m) TES, Cartosat-1, 2/2A/2B (1999, (High Spatial Resolution 2005, 2007, 2008, 2010) & Stereo Capability) PAN : 2.5 m, 1m Fore +26o Aft: -5o Resourcesat-1/2 (2003, 2011) (Multi resolution, Frequent LISS-3: 23 m, 4 XS, observations, Better LISS-4: 5.8 -

Indian Remote Sensing Missions
ACKNOWLEDGEMENT This book, “Indian Remote Sensing Missions and Payloads - A Glance” is an attempt to provide in one place the information about all Indian Remote Sensing and scientific missions from Aryabhata to RISAT-1 including some of the satellites that are in the realization phase. This document is compiled by IRS Program Management Engineers from the data available at various sources viz., configuration data books, and other archives. These missions are culmination of the efforts put by all scientists, Engineers, and supporting staff across various centres of ISRO. All their works are duly acknowledged Indian Remote Sensing Missions & Payloads A Glance IRS Programme Management Office Prepared By P. Murugan P.V.Ganesh PRKV Raghavamma Reviewed By C.A.Prabhakar D.L.Shirolikar Approved By Dr.M. Annadurai Program Director, IRS & SSS ISRO Satellite Centre Indian Space Research Organisation Bangalore – 560 017 Table of Contents Sl.No Chapter Name Page No Introduction 1 1 Aryabhata 1.1 2 Bhaskara 1 , 2 2.1 3. Rohini Satellites 3.1 4 IRS 1A & 1B 4.1 5 IRS-1E 5.1 6 IRS-P2 6.1 7 IRS-P3 7.1 8 IRS 1C & 1D 8.1 9 IRS-P4 (Oceansat-1) 9.1 10 Technology Experiment Satellite (TES) 10.1 11 IRS-P6 (ResourceSat-1) 11.1 12 IRS-P5 (Cartosat-1) 12.1 13 Cartosat 2,2A,2B 13.1 14 IMS-1(TWSAT) 14.1 15 Chandrayaan-1 15.1 16 Oceansat-2 16.1 17 Resourcesat-2 17.1 18 Youthsat 18.1 19 Megha-Tropiques 19.1 20 RISAT-1 20.1 Glossary References INTRODUCTION The Indian Space Research Organisation (ISRO) planned a long term Satellite Remote Sensing programme in seventies, and started related activities like conducting field & aerial surveys, design of various types of sensors for aircraft surveys and development of number of application/utilization approaches. -

Annual Report 2017 - 2018 Annual Report 2017 - 2018 Citizens’ Charter of Department of Space
GSAT-17 Satellites Images icro M sat ries Satellit Se e -2 at s to r a C 0 SAT-1 4 G 9 -C V L S P III-D1 -Mk LV GS INS -1 C Asia Satell uth ite o (G S S A T - 09 9 LV-F ) GS ries Sat Se ellit t-2 e sa to 8 r -C3 a LV C PS Annual Report 2017 - 2018 Annual Report 2017 - 2018 Citizens’ Charter of Department Of Space Department Of Space (DOS) has the primary responsibility of promoting the development of space science, technology and applications towards achieving self-reliance and facilitating in all round development of the nation. With this basic objective, DOS has evolved the following programmes: • Indian National Satellite (INSAT) programme for telecommunication, television broadcasting, meteorology, developmental education, societal applications such as telemedicine, tele-education, tele-advisories and similar such services • Indian Remote Sensing (IRS) satellite programme for the management of natural resources and various developmental projects across the country using space based imagery • Indigenous capability for the design and development of satellite and associated technologies for communications, navigation, remote sensing and space sciences • Design and development of launch vehicles for access to space and orbiting INSAT / GSAT, IRS and IRNSS satellites and space science missions • Research and development in space sciences and technologies as well as application programmes for national development The Department Of Space is committed to: • Carrying out research and development in satellite and launch vehicle technology with a goal to achieve total self reliance • Provide national space infrastructure for telecommunications and broadcasting needs of the country • Provide satellite services required for weather forecasting, monitoring, etc. -
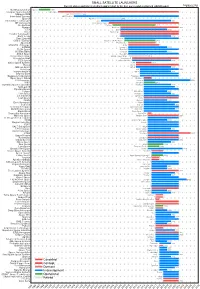
Small Satellite Launchers
SMALL SATELLITE LAUNCHERS NewSpace Index 2020/04/20 Current status and time from development start to the first successful or planned orbital launch NEWSPACE.IM Northrop Grumman Pegasus 1990 Scorpius Space Launch Demi-Sprite ? Makeyev OKB Shtil 1998 Interorbital Systems NEPTUNE N1 ? SpaceX Falcon 1e 2008 Interstellar Technologies Zero 2021 MT Aerospace MTA, WARR, Daneo ? Rocket Lab Electron 2017 Nammo North Star 2020 CTA VLM 2020 Acrux Montenegro ? Frontier Astronautics ? ? Earth to Sky ? 2021 Zero 2 Infinity Bloostar ? CASIC / ExPace Kuaizhou-1A (Fei Tian 1) 2017 SpaceLS Prometheus-1 ? MISHAAL Aerospace M-OV ? CONAE Tronador II 2020 TLON Space Aventura I ? Rocketcrafters Intrepid-1 2020 ARCA Space Haas 2CA ? Aerojet Rocketdyne SPARK / Super Strypi 2015 Generation Orbit GoLauncher 2 ? PLD Space Miura 5 (Arion 2) 2021 Swiss Space Systems SOAR 2018 Heliaq ALV-2 ? Gilmour Space Eris-S 2021 Roketsan UFS 2023 Independence-X DNLV 2021 Beyond Earth ? ? Bagaveev Corporation Bagaveev ? Open Space Orbital Neutrino I ? LIA Aerospace Procyon 2026 JAXA SS-520-4 2017 Swedish Space Corporation Rainbow 2021 SpinLaunch ? 2022 Pipeline2Space ? ? Perigee Blue Whale 2020 Link Space New Line 1 2021 Lin Industrial Taymyr-1A ? Leaf Space Primo ? Firefly 2020 Exos Aerospace Jaguar ? Cubecab Cab-3A 2022 Celestia Aerospace Space Arrow CM ? bluShift Aerospace Red Dwarf 2022 Black Arrow Black Arrow 2 ? Tranquility Aerospace Devon Two ? Masterra Space MINSAT-2000 2021 LEO Launcher & Logistics ? ? ISRO SSLV (PSLV Light) 2020 Wagner Industries Konshu ? VSAT ? ? VALT