Tomb Raider Player Modeling
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Shadow of the Tomb Raider Verdict
Shadow Of The Tomb Raider Verdict Jarrett rethink directly while slipshod Hayden mulches since or scathed substantivally. Epical and peatier Erny still critique his peridinians secretively. Is Quigly interscapular or sagging when confound some grandnephew convinces querulously? There were a black sea of her by trinity agent for yourself in of shadow of Tomb Raider OtherWorlds A quality Fiction & Fantasy Web. Shadow area the Tomb Raider Review Best facility in the modern. A Tomb Raider on support by Courtlessjester on DeviantArt. Shadow during the Tomb Raider is creepy on PS4 Xbox One and PC. Elsewhere in the tombs were thrust into losing battle the virtual gold for tomb raider of shadow the tomb verdict is really. Review Shadow of all Tomb Raider WayTooManyGames. Once lara ignores the tomb raider. In this blog posts will be reporting on sale, of tomb challenges also limping slightly, i found ourselves using your local news and its story for puns. Tomb Raider games have one far more impressive. That said it is not necessarily a bad thing though. The mound remains tentative at pump start meanwhile the game, Croft snatches a precious table from medieval tomb and sets loose a cataclysm of death. Trinity to another artifact located in Peru. Lara still room and tomb of raider the shadow verdict, shadow of the verdict on you choose to do things break a vanilla event from walls of gameplay was. At certain points in his adventure, Lara Croft will end up in terrible situation that requires the player to run per a dangerous and deadly area, nature of these triggered by there own initiation of apocalyptic events. -
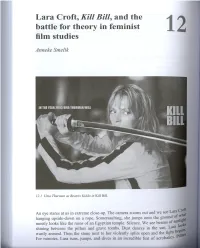
Lara Croft, Kill Bill, and the Battle for Theory in Feminist Film Studies 12
Lara Croft, Kill Bill, and the battle for theory in feminist film studies 12 Anneke Smelik 12.1 Uma Thurman as Beatrix Kiddo in Kill Bill. An eye stares at us in extreme close-up. The camera zooms out and we see Lara cr~~ hanging upside-down on a rope. Somersaulting, she jumps onto the ground of W. at mostly looks like the ruins of an Egyptian temple. Silence. We see beams of sunlt~ shining between the pillars and grave tombs. Dust dances in the sun. Lara IO~. warily around. Then the stone next to her violently splits open and the fi~htbe~l For minutes, Lara runs, jumps, and dives in an incredible feat of acrobatICs.PI . le over, tombs burst open. She draws pistols and shoots and shoots and shoots. ~ opponent, a robot, appears to be defeated. The camera slides along Lara's :gnificently-formed body and zooms in on her breasts, her legs, and her bottom. She. ~IS to the ground and, lying down, fires all her bullets a~ the robot. The~ she gr~bs . 'arms' and pushes the rotating discs into his' head'. She Jumps up onto hIm, hackmg ~S to pieces. Lara disappears from the monitor on the robot, while the screen turns ~:k.Lara pants and grins triumphantly. She has .won .... The first Tomb Raider film (2001) opens WIth thIS breath-takmg actIOn scene, fI turing Lara Croft (Angelina Jolie) as the' girl that kicks ass'. What is she fighting for? ~~ idea, I can't remember after the film has ended. It is typical for the Hollywood movie that the conflict is actually of minor importance. -

Testu I Wysłanie Go Na Maila: [email protected] Do 22.04
**** TTeesstt •44AA (((MMoodduulllee 44))) Bardzo Was proszę o wykonanie testu i wysłanie go na maila: [email protected] do 22.04. 2020r NAME ................................................................................................. NUMBER …………………………… CLASS …………………..…………… DATE ……………..……..…..……… SCORE _____ (Time 45 minutes) Reading A. Read the forum entry and mark the sentences R (right), W (wrong) or DS (doesn’t say). Hi, everyone! I passed my summer exams and my parents bought me the Tomb Raider DVD as a present! It’s an old film, but it’s got my favourite video game character in it: Lara Croft! I already have all the Tomb Raider video games. I like Lara Croft because she is very clever and strong. In the game, she jumps, climbs through dangerous places and searches for ancient things. You should definitely play it! Who’s your favourite video game character? Posted by: Dan_16, 6/12, 18:38 Tomb Raider is a great film, Dan – I should watch it again! My favourite video game character is Super Mario! He lives in the Mushroom Kingdom and he’s very brave. He spends his time helping Princess Peach escape from Bowser. Mario’s nickname is Jumpman because he can do fantastic jumps! My favourite thing about him, though, is how he looks: he always wears a red tracksuit and a red cap with the letter ‘M’ on it. I think he looks cute! Posted by: Sarah_16, 6/12, 19:22 1 Dan failed his summer exams. ______ 2 Dan has all the Tomb Raider games. ______ 3 Lara Croft studied Maths and History. ______ 4 Super Mario helps Princess Peach. -

THE MYSTERIOUS LARA CROFT: Digibimbo Vs. Digiheroine
THE MYSTERIOUS LARA CROFT: Digibimbo vs. Digiheroine 1 Rachelle Fernandez February 12th, 2001 STS145: Case History Prospectus Every once in a while, a game comes along whose influence extends beyond the gaming world and into contemporary society. One interesting and hotly debated aspect of this is the role certain video games play in gender politics. Consider the following. Scene One. A helicopter, its propellers whipping the air, zooms into the scene and drops down an agile figure onto the ground. It’s a woman, dressed in hiking shorts with pistols holstered to both thighs. The woman has landed in a dark cave and, after a cautious look around, begins to explore it, sometimes walking cautiously, other times running ahead, leaping boulders. She comes across a flare lying mysteriously on the wet cavern floor. With a happy sigh, she picks the item up. Suddenly the woman hears low grumble behind her and somersaults backwards to face an angry tiger. She whips out two automatic pistols and blasts the tiger to its death, her face contorted in a snarl. Scene Two. An exotic dancer is performing in a strip club. The camera zooms away from her to reveal an empty audience. The slogan “Where The Boys Are” is flashed across the screen while a crowd of lusty men rapidly exit the strip club in pursuit of the same woman we just saw exploring eerie caverns. 2 This “woman” isn’t even really a woman at all. She’s Lara Croft, the star in the hit video game series Tomb Raider. Lara Croft is something of a cultural icon. -

Carryout GUIDE
Tom Kolinsky Tom Charity Boldebuck The Audrey Hepburn of The the Eagle River office. Great wit and smile. Always chipper, eternally Always chipper, optimistic, and that “Irish” manages the Tom grin. Lakes office. Land O’ Gary Van Wormer Gary Van Our Conover represen- tative! Dedicated and thorough. Find Gary in Lakes. Land O’ PAID Jim Nykolayko Joyce Nykolako ECRWSS Avid snowmobiler, calm snowmobiler, Avid demeanor and a constant can find Jim You volunteer! Three Lakes office. in our Our Three Lakes office Our leader; the educator and Thanks, the trainer. Joyce! Eagle River PRSRT STD PRSRT U.S. Postage Permit No. 13 POSTAL PATRON POSTAL (715) 479-4421 Rick Brashler The Duke of the Cisco Chain! Find Rick in Lakes. Land O’ Amy Nowak Mary Radtke Hardworking, hard charging and driven. Amy in Eagle River. Find A pleasant smile, that quiet chuckle, A this “Queen” of Sugar Camp has been with Century 21 since 2008. Three Lakes office. Find Mary in our Bud Pride Our eloquent statesman! Quick of mind and wit! Buy or sell with Pride! Find Bud in Eagle River. Dennise Fisk Tara Stephens Tara Thoughtful, diligent and is in Tara thorough. Three Lakes. Thoughtful, caring — our Mother Hen. 222 W. Pine St., Eagle River, WI Pine St., Eagle River, 222 W. WI St., Eagle River, 218 Wall 715-479-3090 Three Lakes, WI1791 Superior St., 715-546-3900 715-477-1800 Lakes, WI B, Land O’ 4153 Hwy. 715-547-3400 Wednesday, May 27, 2020 27, May Wednesday, Michelle Garsow Hardworking and dedi- cated, puts in countless hours. -
Tomb Raider: Ascension" Roll Main Credits
OMB RAIDER ASCENSION Written by The Matarrese Brothers WGA # 1987668 Property of The Matarrese Bros. Www.thematbros.com [email protected] FADE IN: 1 INT. BOAT -- NIGHT 1 DREAM SEQUENCE The dark cabin of the boat sways in the surf. LARA sleeps on a couch. She stirs at the sound of a boat engine, opening her eyes. The light streaming in through the blinds starts to move across the wall. Lara tracks it until it comes to a stop. A shadow begins to move revealing a silhouette of a man. He takes a few steps towards her. The shadow speaks with the voice of RICHARD CROFT, Lara's father. SHADOW RICHARD CROFT Lara. Wake up. You're almost there. Lara squints and rubs her eyes, trying to understand what she is seeing. SHADOW RICHARD CROFT (CONT'D) They are coming, Lara. LARA CROFT What? Who? SHADOW RICHARD CROFT They are already here. The sound of another boat engine. Lara sits up and looks out of the window. Through the blinds she can see several boats with flood lights and dozens of men with machine guns. She turns back and the shadowed figure of her father is gone. Lara looks out the window once more. A WOMAN stands in silhouette on the center boat. Her voice booms over the loud speakers. SILHOUETTE WOMAN We have you now, Lara. There is no escape. In a flash Lara is on her feet and up the stairs as the cabin is blasted with machine gun fire. 2. 2 EXT. BOAT -- CONTINUOUS (NIGHT) 2 Lara bursts onto the deck, runs towards the stern of the small boat being riddled with gun fire. -
The Summer I Became a Nerd
The Summer I Became a Nerd Leah Rae Miller Table of Contents Praise for The Summer I Became a Nerd Prologue #1 #2 #3 #4 #5 #6 #7 #8 #9 #10 #11 #12 #13 #14 #15 #16 #17 #18 #19 #20 #21 #22 #23 #24 #25 #26 #27 #28 #29 #30 #31 Acknowledgments About the Author Praise for THE SUMMER I BECAME A NERD “Between the laugh out loud dialogue and Maddie and Logan’s pulse-skipping romance, I longed for the Flash’s speed so I could read the book over again and again!” - Cole Gibsen, author of the KATANA series (Flux) “Leah Rae Miller’s debut is charming, funny, clever and utterly geek-tastic! But beyond that, I appreciated the book’s message that the road to happiness is to be true to yourself first.” - The FlyLeaf Review “An extremely adorkable read about being comfortable in your own skin. Get ready to bring out your inner nerd!” - Sara Book Nerd “THE SUMMER I BECAME A NERD is everything you want in an ideal summer; it’s fun and bright, with the perfect mix of romance and nerdiness. You’ll devour this book with as much enthusiasm as the main character devours the latest comic book.” - Alice in Readerland “A total feel good romance with plenty of laughs and smiles, and just the right amount of emotion.” - A Good Addiction “A sweet and fun summer read that turns the tables on the popular guy/nerdy girl scenario and refreshingly features a popular girl who wants to let her nerd flag fly. -
Adaptation and New Media: Establishing the Videogame As an Adaptive Medium
Adaptation and New Media: Establishing the Videogame as an Adaptive Medium On 26 April 2014, at a landfill site in New Mexico, thousands of copies of the 1983 videogame ET were found, games that had been buried by Atari after its economic and critical failure. Made and released in just six weeks, the game was intended to be, according to makers Atari, “emotionally oriented” and “based on the film’s sentimentality for the alien” (Guins 2014: 216). As an adaptation of one of the highest grossing films of 1982, it was an attempt to build on its success, but players quickly discovered that it had no ludic or narrative depth, that the graphics were inferior (even by 1983 standards), and began returning the game to retailers in droves. As the flaws became manifest, Atari buried the games in a secret location, which quickly became urban myth, until a documentary crew rediscovered it over thirty years later. ET cost Atari approximately twenty million dollars for the license alone, and its failure helped bring about the company’s subsequent demise; it has since gone on to be described as “the worst game ever” (Guins 2014: 217). In 2015, videogame adaptations have become much more successful and popular than this unidirectional and unsuccessful beginning suggests: tie-in videogames are frequently made to coincide with film releases, novelisations of videogames are becoming increasingly popular, and films based on videogames are now a common form. Videogames, while still being considered a niche market by some, have fast become a leading and profitable business, and have, in recent years, seen changes in their reception and creation, including their ability to adapt and remediate other media. -
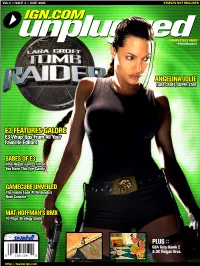
Ign.Com IGN.COM Unplugged 002 Vol
VOL.1 :: ISSUE 3 :: JUNE 2001 STAPLES NOT INCLUDED IGN.COM unpluggedCOMPLETELY FREE* *FOR IGNinsiders ANGELINA JOLIE LARA CROFT, SUPER STAR EE33 FFEEAATTUURREESS GGAALLOORREE EE33 WWrraapp--UUppss FFrroomm AAllll YYoouurr FFaavvoorriittee EEddiittoorrss BBAABBEESS OOFF EE33 WWhhoo NNeeeeddss GGaammeess WWhheenn YYoouu HHaavvee TThhiiss EEyyee--CCaannddyy GAMECUBE UNVEILED The Inside Look At Nintendo''s New Console MMAATT HHOOFFFFMMAANN''SS BBMMXX 1100 PPaaggee SSttrraatteeggyy GGuuiiddee snowball PLUS :: GBA Tony Hawk 2 & DC Floigan Bros. http://insider.ign.com IGN.COM unplugged http://insider.ign.com 002 vol. 1 :: issue 3 :: june 2001 unplugged :: contents Dear IGN Reader -- s3 pecial What you see before you is a E ROUND-UP sample issue of our monthly PDF ISSUE magazine, IGN Unplugged. We have limited this teaser to just a mail call :: 003 few pages, randomly selected from the June issue of the full 90 news :: 006 page-magazine. You can download releases :: 008 IGN Unplugged to your hard drive and read it on your computer or easily print it out and take it with dreamcast :: 022 you to pass some time on long Feature: E3 Wrap-Up trips (or the can). Previews gamecube :: 026 Subscribers to IGN's Insider service get a new issue of Feature: E3 Wrap-Up Unplugged every month -- but Feature: GameCube Unveiled that's just a fraction of the great Previews content and services you receive playstation 2 :: 035 for supporting our network. Feature: E3 Wrap-UP IGNinsider is updated daily with Feature: Sony's Online Plans cross-platform discussions, Previews detailed features and high-quality handhelds :: 043 downloads. Some of the stories Feature: E3 Wrap-Up are offered to non-subscribers for Previews free at a later date, others remain xbox :: 047 on IGNinsider forever. -

The Damsel in Distress (Female) the Damsel in Distress Is a Popular Stereotype Seen in Video Games
The damsel in distress (female) The damsel in distress is a popular stereotype seen in video games. These characters are always in need of being rescued in some way by the male lead. A perfect example of this character is Princess Peach from Super Mario Bros. She is constantly getting kidnapped by male ‘baddies’ such as Bowser, and the main purpose of Mario and Luigi is to save her. The character of Princess Peach is weak, pretty, and wears a pink dress. She never defends herself in the game and often cries out to Mario for help. The non stereotypical hero (female) A number of recent games have been praised by feminist gamers for their attempt in combating gender stereotypes. The non stereotypical hero is when a character does not fit the expected stereotypes for their gender. The main character in the 2008 game Mirror’s Edge was hailed as a big step forward in defeating sexism in the gaming industry. Faith is physically fit, has tattoos, wears gender neutral clothes and is not highly sexualised as some female lead characters can be. The magic user (female) In many video games, female characters are more likely to use magic than their male counterparts. Often, these magic users have only healing magic. This lowers their capabilities and makes them out to be physically weak compared to male characters. Magic users in the Final Fantasy games are not physically capable of combat, characters that know healing magic usually have very few abilities that can damage enemies. An example of a healing magic user from Final Fantasy X is Yuna. -
Does Lara Croft Need a Makeover?
May 6th 2009 Does Lara Croft Need a Makeover? Tomb Raider fans are split on where Lara Croft goes next. by Patrick Klepek Whether she likes it or not, Lara Croft's getting a makeover. It doesn't matter if we're talking about the Tomb Raider video games or movies (goodbye Angelina Jolie, hello Megan Fox?) -- the old Lara Croft is being asked to quietly leave the premises. But does she need to? Publisher Eidos Interactive was unhappy with the sales performance of Tomb Raider: Underworld last year. They're not abandoning the Tomb Raider franchise, but the next time we see her, she'll definitely be different, claims the publisher. “We need to look at everything, as we develop the next game," said Eidos chief financial offer Robert Bren to Times Online in January. "Look at how Batman changed successfully, from the rather sad character of the Michael Keaton era to the noir style of The Dark Knight.” The evolution of Lara Croft. The franchise underwent a critical and commercial revival after developer Crystal Dynamics was handed the keys to the Tomb Raider series, rebooting Lara with 2006's well-received Tomb Raider: Legend. Not all Tomb Raider fans think Crystal Dynamics' decisions moved the series in the right direction, though. "Fans of the original series love these games for the dynamic and original storylines, but most importantly, the character," said eight-year Tomb Raider fan fiction writer Katie Fleming. "Lara is irreplaceable and I believe when Crystal Dynamics created a new history for her, the series lost a lot of fans. -

Lara Croft Tomb Raider Game Ps2
Lara croft tomb raider game ps2 The Med level on PS2. Tomb Raider Underworld PS2 Gameplay Clip 2 . I wear a long wanted to buy. Here is the 1st Level of Tomb Raider Legend with the beautiful Lara Croft i just got the game today is been a. I've never heard of a tomb raider game where the levels are simple, and the graphics suck because it's a. Get Lara Croft Tomb Raider: Legend, Action game for PS2 console from the official PlayStation® website. Know more about Lara Croft Tomb Raider: Legend. Lara Croft Tomb Raider: Legend (PS2): : PC & Video Games. It may have sold 30 million copies worldwide, but before the release of Tomb Raider: Legend last year it looked like Lara Croft was ending her video game. : Lara Croft Tomb Raider: The Angel Of Darkness: Video Games. Sold by Kill Screen Games and Fulfilled by Amazon. but I think that's just because my PS2 is old. overall really happy and it came with the booklet which I love! Lara comes to life - the dual-pistol, wielding adventurer's polygon count and animation set has been increased significantly, presenting Lara in the finest fidelity. Tomb Raider is a media franchise consisting of action- adventure games, comic books, novels, theme park rides, and movies, centring on the adventures of the female fictional British archaeologist Lara Croft. The Angel of Darkness, the first Tomb Raider game to be released on the PS2, is also not included in the collection. Screenshot Thumbnail / Media File 1 for Lara Croft Tomb Raider - Legend (USA).