Wind Turbine Level Energy Storage for Low Voltage Ride Through (LVRT) Support Ali Yousef University of Wisconsin-Milwaukee
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Final Report DE-EE0005380: Assessment of Offshore Wind Farm
THE UNIVERSITY OF TEXAS AT AUSTIN Final Report DE-EE0005380 Assessment of Offshore Wind Farm Effects on Sea Surface, Subsurface and Airborne Electronic Systems Prepared for: U.S. Department of Energy Prepared by: Hao Ling (UT) Mark F. Hamilton (ARL:UT) Rajan Bhalla (SAIC) Walter E. Brown (ARL:UT) Todd A. Hay (ARL:UT) Nicholas J. Whitelonis (UT) Shang-Te Yang (UT) Aale R. Naqvi (UT) 9/30/2013 DE-EE0005380 The University of Texas at Austin Notice and Disclaimer This report is being disseminated by the Department of Energy. As such, the document was prepared in compliance with Section 515 of the Treasury and General Government Appropriations Act for Fiscal Year 2001 (Public Law 106-554) and information quality guidelines issued by the Department of Energy. Though this report does not constitute “influential” information, as that term is defined in DOE’s information quality guidelines or the Office of Management and Budget's Information Quality Bulletin for Peer Review (Bulletin), the study was reviewed both internally and externally prior to publication. For purposes of external review, the study benefited from the advice, technical responses and comments of an expert group of stakeholders. That group of contributors and reviewers included representatives from academia, private corporations, national laboratories, and a broad spectrum of federal agencies. ii DE-EE0005380 The University of Texas at Austin Acknowledgments For their support of this report, the authors thank the entire U.S. Department of Energy (DOE) Wind & Water Power Technologies Program team, and in particular Brian Connor, Gary Norton, Bryan Miller, Michael Hahn, Gretchen Andrus, and Patrick Gilman. -

WIND FARMS of TOMORROW PROFILE NRG Systems, Inc
Giving Wind Direction SYSTEMS IN FOCUS Turbine Inspection Systems & Parts WIND FARMS OF TOMORROW PROFILE NRG Systems, Inc. MARCH 2019 windsystemsmag.com [email protected] 888.502.WORX torkworx.com OH BABY! We have cut the cord on RAD Extreme Torque Machines. See it at the WINDPOWER EXPO in Houston, TX May 20 –23, 2019. BOOTH 3528 • Range from 250 to 3000 ft/lbs • Torque and angle feature • Automatic -2 speed gaearbox • Programmable preset torque settings • Latest Li-ion 18V battery • High accuracy +/- 5% CONTENTS 12 PROFILE IN FOCUS NRG Systems, Inc. helps its customers secure the lowest possible financing rates for their prospective wind projects, AUTOMATING and ensures those projects keep running INSPECTIONS efficiently after they go live. 22 WITH DRONES AND AI AI-based autonomous drones can complete visual inspections for the entire turbine in as little as 15 minutes, 10 times more efficiently than traditional methods. SEVEN YEARS OF SOLID RESULTS Field testing confirms the long-life potential CONVERSATION for Timken™ wear-resistant mainshaft Ben Moss, senior projects director at New bearings in wind turbines. 16 Energy Update, says business gets done at Wind O&M Dallas, and that creates an excitement that people thrive off. 26 2 MARCH 2019 THE COVER: Shutterstock / Illustration by Michele Hall EcoGear 270XP EcoGear ® 270 XP Full-Synthetic PAG Wind Turbine Gear Oil Eliminate oil change headaches THE LIFETIME FILL Reduction in wear on critical equipment Higher load carrying capacity Chemically Engineered Load-Carrying Capacity Non-sludge or varnish forming Better Cold Temperature Start-Ups Hydrolytic stability forgives water ingression Condensation/Water Forgiveness Superior Wear Characteristics Polyalkalene Glycol based synthetic lubricants by American Chemical Technologies protect your turbines and stay within spec while extendingwww.AmericanChemTech.com oil changes to 20 years. -
Wind Power Today, 2010, Wind and Water Power Program
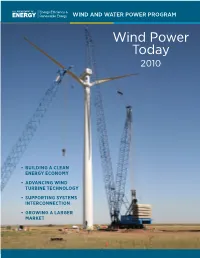
WIND AND WATER POWER PROGRAM Wind Power Today 2010 •• BUILDING•A•CLEAN• ENERGY •ECONOMY •• ADVANCING•WIND• TURBINE •TECHNOLOGY •• SUPPORTING•SYSTEMS•• INTERCONNECTION •• GROWING•A•LARGER• MARKET 2 WIND AND WATER POWER PROGRAM BUILDING•A•CLEAN•ENERGY•ECONOMY The mission of the U.S. Department of Energy Wind Program is to focus the passion, ingenuity, and diversity of the nation to enable rapid expansion of clean, affordable, reliable, domestic wind power to promote national security, economic vitality, and environmental quality. Built in 2009, the 63-megawatt Dry Lake Wind Power Project is Arizona’s first utility-scale wind power project. Building•a•Green•Economy• In 2009, more wind generation capacity was installed in the United States than in any previous year despite difficult economic conditions. The rapid expansion of the wind industry underscores the potential for wind energy to supply 20% of the nation’s electricity by the year 2030 as envisioned in the 2008 Department of Energy (DOE) report 20% Wind Energy by 2030: Increasing Wind Energy’s Contribution to U.S. Electricity Supply. Funding provided by DOE, the American Recovery and Reinvestment Act CONTENTS of 2009 (Recovery Act), and state and local initiatives have all contributed to the wind industry’s growth and are moving the BUILDING•A•CLEAN•ENERGY•ECONOMY• ........................2 nation toward achieving its energy goals. ADVANCING•LARGE•WIND•TURBINE•TECHNOLOGY• .....7 Wind energy is poised to make a major contribution to the President’s goal of doubling our nation’s electricity generation SMALL •AND•MID-SIZED•TURBINE•DEVELOPMENT• ...... 15 capacity from clean, renewable sources by 2012. The DOE Office of Energy Efficiency and Renewable Energy invests in clean SUPPORTING•GRID•INTERCONNECTION• .................... -

Microgrid and Distributed Energy Resources Standards and Guidelines Review: Grid Connection and Operation Technical Requirements
energies Review Microgrid and Distributed Energy Resources Standards and Guidelines Review: Grid Connection and Operation Technical Requirements David Rebollal, Miguel Carpintero-Rentería , David Santos-Martín * and Mónica Chinchilla Department of Electrical Engineering, University Carlos III of Madrid (UC3M), Avda. De la Universidad 30, Leganés, 28911 Madrid, Spain; [email protected] (D.R.); [email protected] (M.C.-R.); [email protected] (M.C.) * Correspondence: [email protected] Abstract: In this review, the state of the art of 23 distributed generation and microgrids standards has been analyzed. Among these standards, 18 correspond mainly to distributed generation while five of them introduce the concept of microgrid. The following topics have been considered: interconnection criteria, operating conditions, control capabilities, power quality, protection functions and reference variables. The revised national standards cover ten countries on four continents, which represents 80% of the countries with the largest installed renewable capacities. In addition, eight other relevant international standards have been analyzed, finding IEEE 1547 as the most comprehensive standard. It is identified a clear need to define a common framework for distributed energy resources (DERs) and microgrid standards in the future, wherein topics, terminology, and values are expressed in a manner that may widely cover the entire diversity in a way similar to how it has already been expressed at the network transport level by the ENTSO-E codes. Citation: Rebollal, D.; Carpintero-Rentería, M.; Keywords: microgrids; distributed energy resources; standard; grid support; voltage ride through; Santos-Martín, D.; Chinchilla, M. anti-islanding protection; intentional island Microgrid and Distributed Energy Resources Standards and Guidelines Review: Grid Connection and Operation Technical Requirements. -

Wind Powering America Fy08 Activities Summary
WIND POWERING AMERICA FY08 ACTIVITIES SUMMARY Energy Efficiency & Renewable Energy Dear Wind Powering America Colleague, We are pleased to present the Wind Powering America FY08 Activities Summary, which reflects the accomplishments of our state Wind Working Groups, our programs at the National Renewable Energy Laboratory, and our partner organizations. The national WPA team remains a leading force for moving wind energy forward in the United States. At the beginning of 2008, there were more than 16,500 megawatts (MW) of wind power installed across the United States, with an additional 7,000 MW projected by year end, bringing the U.S. installed capacity to more than 23,000 MW by the end of 2008. When our partnership was launched in 2000, there were 2,500 MW of installed wind capacity in the United States. At that time, only four states had more than 100 MW of installed wind capacity. Twenty-two states now have more than 100 MW installed, compared to 17 at the end of 2007. We anticipate that four or five additional states will join the 100-MW club in 2009, and by the end of the decade, more than 30 states will have passed the 100-MW milestone. WPA celebrates the 100-MW milestones because the first 100 megawatts are always the most difficult and lead to significant experience, recognition of the wind energy’s benefits, and expansion of the vision of a more economically and environmentally secure and sustainable future. Of course, the 20% Wind Energy by 2030 report (developed by AWEA, the U.S. Department of Energy, the National Renewable Energy Laboratory, and other stakeholders) indicates that 44 states may be in the 100-MW club by 2030, and 33 states will have more than 1,000 MW installed (at the end of 2008, there were six states in that category). -

DNVGL-ST-0125 Grid Code Compliance
STANDARD DNVGL-ST-0125 Edition March 2016 Grid code compliance The electronic pdf version of this document found through http://www.dnvgl.com is the officially binding version. The documents are available free of charge in PDF format. DNV GL AS FOREWORD DNV GL standards contain requirements, principles and acceptance criteria for objects, personnel, organisations and/or operations. © DNV GL AS March 2016 Any comments may be sent by e-mail to [email protected] This service document has been prepared based on available knowledge, technology and/or information at the time of issuance of this document. The use of this document by others than DNV GL is at the user's sole risk. DNV GL does not accept any liability or responsibility for loss or damages resulting from any use of this document. CHANGES – CURRENT General This is a new document. Changes – current Standard, DNVGL-ST-0125 – Edition March 2016 Page 3 DNV GL AS Contents CHANGES – CURRENT .................................................................................................. 3 Sec.1 General ......................................................................................................... 6 1.1 Introduction ...........................................................................................6 1.2 Objective................................................................................................6 1.3 Scope and application ............................................................................6 1.4 Glossary .................................................................................................7 -
Microgrid Design Considerations
Microgrid Design Considerations Dr. Arindam Maitra, EPRI September 8, 2016 Part 3 of 3 © 2015 Electric Power Research Institute, Inc. All rights reserved. Outline – Microgrid Design and Analysis Tutorial Part II Time Topics 14:30-15:00 Design analysis • Needs and Key Interconnection Issues (Arindam Maitra) 15:30-17:30 Design analysis (cont.) • Methods and Tools • Case Studies #1: Renewable Rich Microgrids - Protection Case Studies (Mohamed El Khatib) #2: Rural radial #3: Secondary n/w 17:00-17:30 Q&A 17:30 Adjourn 2 © 2015 Electric Power Research Institute, Inc. All rights reserved. Microgrids .Optimization of microgrid design is challenging and inherently contains many unknowns… Regulatory Issues Value of Resiliency System Design Challenges Engineering Studies Costs 3 © 2015 Electric Power Research Institute, Inc. All rights reserved. Integrating Customer DER with Utility Assets Customer Utility Assets Assets Micro Grid Controller SCADA/DMS/ / DERMS* Enterprise Integrate d Grid Energy Storage* Isolating Device* Distribution Transformer *New assets 4 © 2015 Electric Power Research Institute, Inc. All rights reserved. Microgrid Types .Commercial/Industrial Microgrids: Built with the goal of reducing demand and costs during normal operation, although the operation of critical functions during outages is also important, especially for data centers. .Community/City/Utility and Network Microgrids: Improve reliability of critical infrastructure, deferred asset investment, emission and energy policy targets and also promote community participation. .University Campus Microgrids: Meet the high reliability needs for research labs, campus housing, large heating and cooling demands at large cost reduction opportunities, and lower emission targets. Most campuses already have DG resources, with microgrid technology linking them together. -
Design of Capacitive Bridge Fault Current Limiter for Low-Voltage Ride-Through Capacity Enrichment of Doubly Fed Induction Generator-Based Wind Farm
sustainability Article Design of Capacitive Bridge Fault Current Limiter for Low-Voltage Ride-Through Capacity Enrichment of Doubly Fed Induction Generator-Based Wind Farm A. Padmaja 1, Allusivala Shanmukh 1, Siva Subrahmanyam Mendu 2, Ramesh Devarapalli 3 , Javier Serrano González 4 and Fausto Pedro García Márquez 5,* 1 Department of Electrical and Electronics Engineering, JNTUK University College of Engineering, Vizianagaram 535003, India; [email protected] (A.P.); [email protected] (A.S.) 2 Department of Mechanical Engineering, MVGR College of Engineering (Autonomous), Vizianagaram 535005, India; [email protected] 3 Department of Electrical Engineering, Birsa Institute of Technology Sindri, Dhanbad 828123, India; [email protected] 4 Department of Electrical Engineering, University of Seville, 41004 Sevilla, Spain; [email protected] 5 Ingenium Research Group, University of Castilla-La Mancha, 13001 Ciudad Real, Spain * Correspondence: [email protected] Abstract: The increase in penetration of wind farms operating with doubly fed induction generators (DFIG) results in stability issues such as voltage dips and high short circuit currents in the case of faults. To overcome these issues, and to achieve reliable and sustainable power from an uncertain Citation: Padmaja, A.; Shanmukh, wind source, fault current limiters (FCL) are incorporated. This work focuses on limiting the short A.; Mendu, S.S.; Devarapalli, R.; circuit current level and fulfilling the reactive power compensation of a DFIG wind farm using a Serrano González, J.; García Márquez, capacitive bridge fault current limiter (CBFCL). To deliver sustainable wind power to the grid, a F.P. Design of Capacitive Bridge Fault fuzzy-based CBFCL is designed for generating optimal reactive power to suppress the instantaneous Current Limiter for Low-Voltage voltage drop during the fault and in the recovery state. -

A Comprehensive Review of Low-Voltage-Ride-Through Methods for fixed-Speed Wind Power Generators
Renewable and Sustainable Energy Reviews 55 (2016) 823–839 Contents lists available at ScienceDirect Renewable and Sustainable Energy Reviews journal homepage: www.elsevier.com/locate/rser A comprehensive review of low-voltage-ride-through methods for fixed-speed wind power generators Amirhasan Moghadasi a,b,n, Arif Sarwat a,b, Josep M. Guerrero c a Energy Systems Research Laboratory, Florida International University, FL 3920, FL, USA b Electrical and Computer Engineering Department, Florida International University (FIU), FL, USA c Department of Energy Technology, Aalborg University, Aalborg, Denmark article info abstract Article history: This paper presents a comprehensive review of various techniques employed to enhance the low voltage Received 7 February 2015 ride through (LVRT) capability of the fixed-speed induction generators (FSIGs)-based wind turbines Received in revised form (WTs), which has a non-negligible 20% contribution of the existing wind energy in the world. As the 6 September 2015 FSIG-based WT system is directly connected to the grid with no power electronic interfaces, terminal Accepted 12 November 2015 voltage or reactive power output may not be precisely controlled. Thus, various LVRT strategies based on Available online 5 December 2015 installation of the additional supporting technologies have been proposed in the literature. Although the Keywords: various individual technologies are well documented, a comparative study of existing approaches has not Economic feasibility been reported so far. This paper attempts to fill this void by providing a comprehensive analysis of these Fixed-speed induction generators (FSIGs) LVRT methods for FSIG-based WTs in terms of dynamic performance, controller complexity, and eco- Low voltage ride-through (LVRT) nomic feasibility. -
The Impact of Voltage Dip Characteristics on Low Voltage Ride Through of DFIG-Based Wind Turbines
DEGREE PROJECT IN ELECTRICAL ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2019 The Impact of Voltage Dip Characteristics on Low Voltage Ride Through of DFIG-based Wind Turbines CHENG CHEN KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE The Impact of Voltage Dip Characteristics on Low Voltage Ride Through of DFIG-based Wind Turbines Author Cheng Chen <[email protected]> KTH Royal Institute of Technology Program MSc Electric Power Engineering Place and Date KTH Royal Institute of Technology, Stockholm, Sweden Luleå University of Technology, Skellefteå, Sweden June 2019 Examiner Patrik Hilber KTH Royal Institute of Technology Supervisors Math Bollen Luleå University of Technology Nathaniel Taylor KTH Royal Institute of Technology 1 Abstract In last decade, there is a large increase in installed capacity of wind power. As more wind power is integrated into utility networks, related technology challenges draw much attention. The doubly fed induction generator (DFIG) is the mainstream choice for wind turbine generator (WTG) in current market and the object of this thesis. It is very sensitive to voltage dips. The enhancement of low voltage ride through (LVRT) is one of the most important issues for DFIG, and many works have already been done to provide solutions. In current works, the voltage dip waveforms that are applied in LVRT related works are largely different from waveforms in reality, because they fail to consider the the effect of realistic wind farm configurations on waveforms of voltage dips and significant influences of additional characteristics of voltage dips. The true impact of the voltage dip needs to be assessed in performance evaluation and development of LVRT methods. -

To Download This Report (PDF)
2009 INDIANA RENEWABLE ENERGY RESOURCES STUDY State Utility Forecasting Group Energy Center Purdue University West Lafayette, Indiana David Nderitu Emily Gall Douglas Gotham Forrest Holland Marco Velastegui Paul Preckel September 2009 2009 Indiana Renewable Energy Resources Study - State Utility Forecasting Group Table of Contents Page List of Figures iii List of Tables v Acronyms and Abbreviations vi Foreword ix 1. Overview 1 1.1 Trends in renewable energy consumption in the United States 1 1.2 Trends in renewable energy consumption in Indiana 4 1.3 References 8 2. Energy from Wind 9 2.1 Introduction 9 2.2 Economics of wind energy 11 2.3 State of wind energy nationally 14 2.4 Wind energy in Indiana 18 2.5 Incentives for wind energy 24 2.6 References 26 3. Dedicated Energy Crops 27 3.1 Introduction 27 3.2 Economics of energy crops 30 3.3 State of energy crops nationally 32 3.4 Energy crops in Indiana 36 3.5 Incentives for energy crops 38 3.6 References 40 4. Organic Waste Biomass 43 4.1 Introduction 43 4.2 Economics of organic waste biomass 46 4.3 State of organic waste biomass nationally 47 4.4 Organic waste biomass in Indiana 49 4.5 Incentives for organic waste biomass 53 4.6 References 54 i 2009 Indiana Renewable Energy Resources Study - State Utility Forecasting Group 5. Solar Energy 57 5.1 Introduction 57 5.2 Economics of solar technologies 60 5.3 State of solar energy nationally 60 5.4 Solar energy in Indiana 66 5.5 Incentives for solar energy 66 5.6 References 69 6. -

Wind Turbines and Proximity to Homes
! ! ! ! ! ! ! Wind Turbines and Proximity! to Homes: The Impact of Wind Turbine Noise on Health a review of the literature & discussion of the issues ! ! ! by! ! Barbara J Frey, BA, MA (University of Minnesota) & Peter J Hadden, BSc (Est Man), FRICS January 2012 Health is a state of complete physical, mental, and social well-being, and not merely the absence of disease and infirmity. -- The World Health Organization Charter The objective of science is not agreement on a course of action, but the pursuit of truth. -- John Kay (2007) First, Do No Harm. -- The Hippocratic Oath ! "! Table of Contents ! Acknowledgements 3 Preface 4 Introduction 5 Chapter 1 Wind Turbines built near Homes: the Effects on People 8 Appendix 1: People’s Health Experiences: Additional References 21 Chapter 2 Wind Turbine Noise and Guidance 22 2.1 Wind turbine noise 22 2.2 Wind turbine noise guidance 38 2.3 Wind turbine noise: Guidance process 43 2.4 Wind turbine noise: Low frequency noise (LFN) 54 2.5 Wind turbine noise: Amplitude modulation (AM) 60 Appendix 2: Wind Turbine Noise & Guidance: Additional References 65 Chapter 3 Wind Turbine Noise: Impacts on Health 67 3.1 Wind turbine noise and its impacts on health, sleep, and cognition 67 3.2 Wind turbine noise: Clinical studies and counterclaims 92 Appendix 3.1 Health: International Perspectives 101 Appendix 3.2 Health: Additional References 102 Chapter 4 Wind Turbine Noise and Human Rights 103 4.1 Potential violations 103 4.2 The United Nations Universal Declaration of Human Rights 112 4.3 State Indifference to