Dimensional Analysis in Relativity and in Differential Geometry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Ricci, Levi-Civita, and the Birth of General Relativity Reviewed by David E
BOOK REVIEW Einstein’s Italian Mathematicians: Ricci, Levi-Civita, and the Birth of General Relativity Reviewed by David E. Rowe Einstein’s Italian modern Italy. Nor does the author shy away from topics Mathematicians: like how Ricci developed his absolute differential calculus Ricci, Levi-Civita, and the as a generalization of E. B. Christoffel’s (1829–1900) work Birth of General Relativity on quadratic differential forms or why it served as a key By Judith R. Goodstein tool for Einstein in his efforts to generalize the special theory of relativity in order to incorporate gravitation. In This delightful little book re- like manner, she describes how Levi-Civita was able to sulted from the author’s long- give a clear geometric interpretation of curvature effects standing enchantment with Tul- in Einstein’s theory by appealing to his concept of parallel lio Levi-Civita (1873–1941), his displacement of vectors (see below). For these and other mentor Gregorio Ricci Curbastro topics, Goodstein draws on and cites a great deal of the (1853–1925), and the special AMS, 2018, 211 pp. 211 AMS, 2018, vast secondary literature produced in recent decades by the world that these and other Ital- “Einstein industry,” in particular the ongoing project that ian mathematicians occupied and helped to shape. The has produced the first 15 volumes of The Collected Papers importance of their work for Einstein’s general theory of of Albert Einstein [CPAE 1–15, 1987–2018]. relativity is one of the more celebrated topics in the history Her account proceeds in three parts spread out over of modern mathematical physics; this is told, for example, twelve chapters, the first seven of which cover episodes in [Pais 1982], the standard biography of Einstein. -

A Comparison of Differential Calculus and Differential Geometry in Two
1 A Two-Dimensional Comparison of Differential Calculus and Differential Geometry Andrew Grossfield, Ph.D Vaughn College of Aeronautics and Technology Abstract and Introduction: Plane geometry is mainly the study of the properties of polygons and circles. Differential geometry is the study of curves that can be locally approximated by straight line segments. Differential calculus is the study of functions. These functions of calculus can be viewed as single-valued branches of curves in a coordinate system where the horizontal variable controls the vertical variable. In both studies the derivative multiplies incremental changes in the horizontal variable to yield incremental changes in the vertical variable and both studies possess the same rules of differentiation and integration. It seems that the two studies should be identical, that is, isomorphic. And, yet, students should be aware of important differences. In differential geometry, the horizontal and vertical units have the same dimensional units. In differential calculus the horizontal and vertical units are usually different, e.g., height vs. time. There are differences in the two studies with respect to the distance between points. In differential geometry, the Pythagorean slant distance formula prevails, while in the 2- dimensional plane of differential calculus there is no concept of slant distance. The derivative has a different meaning in each of the two subjects. In differential geometry, the slope of the tangent line determines the direction of the tangent line; that is, the angle with the horizontal axis. In differential calculus, there is no concept of direction; instead, the derivative describes a rate of change. In differential geometry the line described by the equation y = x subtends an angle, α, of 45° with the horizontal, but in calculus the linear relation, h = t, bears no concept of direction. -

Geometry Course Outline
GEOMETRY COURSE OUTLINE Content Area Formative Assessment # of Lessons Days G0 INTRO AND CONSTRUCTION 12 G-CO Congruence 12, 13 G1 BASIC DEFINITIONS AND RIGID MOTION Representing and 20 G-CO Congruence 1, 2, 3, 4, 5, 6, 7, 8 Combining Transformations Analyzing Congruency Proofs G2 GEOMETRIC RELATIONSHIPS AND PROPERTIES Evaluating Statements 15 G-CO Congruence 9, 10, 11 About Length and Area G-C Circles 3 Inscribing and Circumscribing Right Triangles G3 SIMILARITY Geometry Problems: 20 G-SRT Similarity, Right Triangles, and Trigonometry 1, 2, 3, Circles and Triangles 4, 5 Proofs of the Pythagorean Theorem M1 GEOMETRIC MODELING 1 Solving Geometry 7 G-MG Modeling with Geometry 1, 2, 3 Problems: Floodlights G4 COORDINATE GEOMETRY Finding Equations of 15 G-GPE Expressing Geometric Properties with Equations 4, 5, Parallel and 6, 7 Perpendicular Lines G5 CIRCLES AND CONICS Equations of Circles 1 15 G-C Circles 1, 2, 5 Equations of Circles 2 G-GPE Expressing Geometric Properties with Equations 1, 2 Sectors of Circles G6 GEOMETRIC MEASUREMENTS AND DIMENSIONS Evaluating Statements 15 G-GMD 1, 3, 4 About Enlargements (2D & 3D) 2D Representations of 3D Objects G7 TRIONOMETRIC RATIOS Calculating Volumes of 15 G-SRT Similarity, Right Triangles, and Trigonometry 6, 7, 8 Compound Objects M2 GEOMETRIC MODELING 2 Modeling: Rolling Cups 10 G-MG Modeling with Geometry 1, 2, 3 TOTAL: 144 HIGH SCHOOL OVERVIEW Algebra 1 Geometry Algebra 2 A0 Introduction G0 Introduction and A0 Introduction Construction A1 Modeling With Functions G1 Basic Definitions and Rigid -

Non-Metric Generalizations of Relativistic Gravitational Theory and Observational Data Interpretation
Non-metric Generalizations of Relativistic Gravitational Theory and Observational Data Interpretation А. N. Alexandrov, I. B. Vavilova, V. I. Zhdanov Astronomical Observatory,Taras Shevchenko Kyiv National University 3 Observatorna St., Kyiv 04053 Ukraine Abstract We discuss theoretical formalisms concerning with experimental verification of General Relativity (GR). Non-metric generalizations of GR are considered and a system of postulates is formulated for metric-affine and Finsler gravitational theories. We consider local observer reference frames to be a proper tool for comparing predictions of alternative theories with each other and with the observational data. Integral formula for geodesic deviation due to the deformation of connection is obtained. This formula can be applied for calculations of such effects as the bending of light and time- delay in presence of non-metrical effects. 1. Introduction General Relativity (GR) experimental verification is a principal problem of gravitational physics. Research of the GR application limits is of a great interest for the fundamental physics and cosmology, whose alternative lines of development are connected with the corresponding changes of space-time model. At present, various aspects of GR have been tested with rather a high accuracy (Will, 2001). General Relativity is well tested experimentally for weak gravity fields, and it is adopted as a basis for interpretation of the most precise measurements in astronomy and geodynamics (Soffel et al., 2003). Considerable efforts have to be applied to verify GR conclusions in strong fields (Will, 2001). For GR experimental verification we should go beyond its application limits, consider it in a wider context, and compare it with alternative theories. -
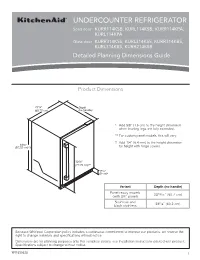
Dimension Guide
UNDERCOUNTER REFRIGERATOR Solid door KURR114KSB, KURL114KSB, KURR114KPA, KURL114KPA Glass door KURR314KSS, KURL314KSS, KURR314KBS, KURL314KBS, KURR214KSB Detailed Planning Dimensions Guide Product Dimensions 237/8” Depth (60.72 cm) (no handle) * Add 5/8” (1.6 cm) to the height dimension when leveling legs are fully extended. ** For custom panel models, this will vary. † Add 1/4” (6.4 mm) to the height dimension 343/8” (87.32 cm)*† for height with hinge covers. 305/8” (77.75 cm)** 39/16” (9 cm)* Variant Depth (no handle) Panel ready models 2313/16” (60.7 cm) (with 3/4” panel) Stainless and 235/8” (60.2 cm) black stainless Because Whirlpool Corporation policy includes a continuous commitment to improve our products, we reserve the right to change materials and specifications without notice. Dimensions are for planning purposes only. For complete details, see Installation Instructions packed with product. Specifications subject to change without notice. W11530525 1 Panel ready models Stainless and black Dimension Description (with 3/4” panel) stainless models A Width of door 233/4” (60.3 cm) 233/4” (60.3 cm) B Width of the grille 2313/16” (60.5 cm) 2313/16” (60.5 cm) C Height to top of handle ** 311/8” (78.85 cm) Width from side of refrigerator to 1 D handle – door open 90° ** 2 /3” (5.95 cm) E Depth without door 2111/16” (55.1 cm) 2111/16” (55.1 cm) F Depth with door 2313/16” (60.7 cm) 235/8” (60.2 cm) 7 G Depth with handle ** 26 /16” (67.15 cm) H Depth with door open 90° 4715/16” (121.8 cm) 4715/16” (121.8 cm) **For custom panel models, this will vary. -

Riemann's Contribution to Differential Geometry
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Historia Mathematics 9 (1982) l-18 RIEMANN'S CONTRIBUTION TO DIFFERENTIAL GEOMETRY BY ESTHER PORTNOY UNIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN, URBANA, IL 61801 SUMMARIES In order to make a reasonable assessment of the significance of Riemann's role in the history of dif- ferential geometry, not unduly influenced by his rep- utation as a great mathematician, we must examine the contents of his geometric writings and consider the response of other mathematicians in the years immedi- ately following their publication. Pour juger adkquatement le role de Riemann dans le developpement de la geometric differentielle sans etre influence outre mesure par sa reputation de trks grand mathematicien, nous devons &udier le contenu de ses travaux en geometric et prendre en consideration les reactions des autres mathematiciens au tours de trois an&es qui suivirent leur publication. Urn Riemann's Einfluss auf die Entwicklung der Differentialgeometrie richtig einzuschZtzen, ohne sich von seinem Ruf als bedeutender Mathematiker iiberm;issig beeindrucken zu lassen, ist es notwendig den Inhalt seiner geometrischen Schriften und die Haltung zeitgen&sischer Mathematiker unmittelbar nach ihrer Verijffentlichung zu untersuchen. On June 10, 1854, Georg Friedrich Bernhard Riemann read his probationary lecture, "iber die Hypothesen welche der Geometrie zu Grunde liegen," before the Philosophical Faculty at Gdttingen ill. His biographer, Dedekind [1892, 5491, reported that Riemann had worked hard to make the lecture understandable to nonmathematicians in the audience, and that the result was a masterpiece of presentation, in which the ideas were set forth clearly without the aid of analytic techniques. -

Spectral Dimensions and Dimension Spectra of Quantum Spacetimes
PHYSICAL REVIEW D 102, 086003 (2020) Spectral dimensions and dimension spectra of quantum spacetimes † Michał Eckstein 1,2,* and Tomasz Trześniewski 3,2, 1Institute of Theoretical Physics and Astrophysics, National Quantum Information Centre, Faculty of Mathematics, Physics and Informatics, University of Gdańsk, ulica Wita Stwosza 57, 80-308 Gdańsk, Poland 2Copernicus Center for Interdisciplinary Studies, ulica Szczepańska 1/5, 31-011 Kraków, Poland 3Institute of Theoretical Physics, Jagiellonian University, ulica S. Łojasiewicza 11, 30-348 Kraków, Poland (Received 11 June 2020; accepted 3 September 2020; published 5 October 2020) Different approaches to quantum gravity generally predict that the dimension of spacetime at the fundamental level is not 4. The principal tool to measure how the dimension changes between the IR and UV scales of the theory is the spectral dimension. On the other hand, the noncommutative-geometric perspective suggests that quantum spacetimes ought to be characterized by a discrete complex set—the dimension spectrum. We show that these two notions complement each other and the dimension spectrum is very useful in unraveling the UV behavior of the spectral dimension. We perform an extended analysis highlighting the trouble spots and illustrate the general results with two concrete examples: the quantum sphere and the κ-Minkowski spacetime, for a few different Laplacians. In particular, we find that the spectral dimensions of the former exhibit log-periodic oscillations, the amplitude of which decays rapidly as the deformation parameter tends to the classical value. In contrast, no such oscillations occur for either of the three considered Laplacians on the κ-Minkowski spacetime. DOI: 10.1103/PhysRevD.102.086003 I. -

A Short and Transparent Derivation of the Lorentz-Einstein Transformations
A brief and transparent derivation of the Lorentz-Einstein transformations via thought experiments Bernhard Rothenstein1), Stefan Popescu 2) and George J. Spix 3) 1) Politehnica University of Timisoara, Physics Department, Timisoara, Romania 2) Siemens AG, Erlangen, Germany 3) BSEE Illinois Institute of Technology, USA Abstract. Starting with a thought experiment proposed by Kard10, which derives the formula that accounts for the relativistic effect of length contraction, we present a “two line” transparent derivation of the Lorentz-Einstein transformations for the space-time coordinates of the same event. Our derivation make uses of Einstein’s clock synchronization procedure. 1. Introduction Authors make a merit of the fact that they derive the basic formulas of special relativity without using the Lorentz-Einstein transformations (LET). Thought experiments play an important part in their derivations. Some of these approaches are devoted to the derivation of a given formula whereas others present a chain of derivations for the formulas of relativistic kinematics in a given succession. Two anthological papers1,2 present a “two line” derivation of the formula that accounts for the time dilation using as relativistic ingredients the invariant and finite light speed in free space c and the invariance of distances measured perpendicular to the direction of relative motion of the inertial reference frame from where the same “light clock” is observed. Many textbooks present a more elaborated derivation of the time dilation formula using a light clock that consists of two parallel mirrors located at a given distance apart from each other and a light signal that bounces between when observing it from two inertial reference frames in relative motion.3,4 The derivation of the time dilation formula is intimately related to the formula that accounts for the length contraction derived also without using the LET. -

On the Visualization of Geometric Properties of Particular Spacetimes
Technische Universität Berlin Diploma Thesis On the Visualization of Geometric Properties of Particular Spacetimes Torsten Schönfeld January 14, 2009 reviewed by Prof. Dr. H.-H. von Borzeszkowski Department of Theoretical Physics Faculty II, Technische Universität Berlin and Priv.-Doz. Dr. M. Scherfner Department of Mathematics Faculty II, Technische Universität Berlin Zusammenfassung auf Deutsch Ziel und Aufgabenstellung dieser Diplomarbeit ist es, Möglichkeiten der Visualisierung in der Allgemeinen Relativitätstheorie zu finden. Das Hauptaugenmerk liegt dabei auf der Visualisierung geometrischer Eigenschaften einiger akausaler Raumzeiten, d.h. Raumzeiten, die geschlossene zeitartige Kurven erlauben. Die benutzten und untersuchten Techniken umfassen neben den gängigen Möglichkeiten (Vektorfelder, Hyperflächen) vor allem das Darstellen von Geodäten und Lichtkegeln. Um den Einfluss der Raumzeitgeometrie auf das Verhalten von kräftefreien Teilchen zu untersuchen, werden in der Diplomarbeit mehrere Geodäten mit unterschiedlichen Anfangsbedinungen abgebildet. Dies erlaubt es zum Beispiel, die Bildung von Teilchen- horizonten oder Kaustiken zu analysieren. Die Darstellung von Lichtkegeln wiederum ermöglicht es, eine Vorstellung von der kausalen Struktur einer Raumzeit zu erlangen. Ein „Umkippen“ der Lichtkegel deutet beispielsweise oft auf signifikante Änderungen in der Raumzeit hin, z.B. auf die Möglichkeit von geschlossenen zeitartigen Kurven. Zur Implementierung dieser Techniken wurde im Rahmen der Diplomarbeit ein Ma- thematica-Paket namens -

Zero-Dimensional Symmetry
Snapshots of modern mathematics № 3/2015 from Oberwolfach Zero-dimensional symmetry George Willis This snapshot is about zero-dimensional symmetry. Thanks to recent discoveries we now understand such symmetry better than previously imagined possible. While still far from complete, a picture of zero-dimen- sional symmetry is beginning to emerge. 1 An introduction to symmetry: spinning globes and infinite wallpapers Let’s begin with an example. Think of a sphere, for example a globe’s surface. Every point on it is specified by two parameters, longitude and latitude. This makes the sphere a two-dimensional surface. You can rotate the globe along an axis through the center; the object you obtain after the rotation still looks like the original globe (although now maybe New York is where the Mount Everest used to be), meaning that the sphere has rotational symmetry. Each rotation is prescribed by the latitude and longitude where the axis cuts the southern hemisphere, and by an angle through which it rotates the sphere. 1 These three parameters specify all rotations of the sphere, which thus has three-dimensional rotational symmetry. In general, a symmetry may be viewed as being a transformation (such as a rotation) that leaves an object looking unchanged. When one transformation is followed by a second, the result is a third transformation that is called the product of the other two. The collection of symmetries and their product 1 Note that we include the rotation through the angle 0, that is, the case where the globe actually does not rotate at all. 1 operation forms an algebraic structure called a group 2 . -

Massachusetts Institute of Technology Midterm
Massachusetts Institute of Technology Physics Department Physics 8.20 IAP 2005 Special Relativity January 18, 2005 7:30–9:30 pm Midterm Instructions • This exam contains SIX problems – pace yourself accordingly! • You have two hours for this test. Papers will be picked up at 9:30 pm sharp. • The exam is scored on a basis of 100 points. • Please do ALL your work in the white booklets that have been passed out. There are extra booklets available if you need a second. • Please remember to put your name on the front of your exam booklet. • If you have any questions please feel free to ask the proctor(s). 1 2 Information Lorentz transformation (along the xaxis) and its inverse x� = γ(x − βct) x = γ(x� + βct�) y� = y y = y� z� = z z = z� ct� = γ(ct − βx) ct = γ(ct� + βx�) � where β = v/c, and γ = 1/ 1 − β2. Velocity addition (relative motion along the xaxis): � ux − v ux = 2 1 − uxv/c � uy uy = 2 γ(1 − uxv/c ) � uz uz = 2 γ(1 − uxv/c ) Doppler shift Longitudinal � 1 + β ν = ν 1 − β 0 Quadratic equation: ax2 + bx + c = 0 1 � � � x = −b ± b2 − 4ac 2a Binomial expansion: b(b − 1) (1 + a)b = 1 + ba + a 2 + . 2 3 Problem 1 [30 points] Short Answer (a) [4 points] State the postulates upon which Einstein based Special Relativity. (b) [5 points] Outline a derviation of the Lorentz transformation, describing each step in no more than one sentence and omitting all algebra. (c) [2 points] Define proper length and proper time. -

Relativistic Spacetime Structure
Relativistic Spacetime Structure Samuel C. Fletcher∗ Department of Philosophy University of Minnesota, Twin Cities & Munich Center for Mathematical Philosophy Ludwig Maximilian University of Munich August 12, 2019 Abstract I survey from a modern perspective what spacetime structure there is according to the general theory of relativity, and what of it determines what else. I describe in some detail both the “standard” and various alternative answers to these questions. Besides bringing many underexplored topics to the attention of philosophers of physics and of science, metaphysicians of science, and foundationally minded physicists, I also aim to cast other, more familiar ones in a new light. 1 Introduction and Scope In the broadest sense, spacetime structure consists in the totality of relations between events and processes described in a spacetime theory, including distance, duration, motion, and (more gener- ally) change. A spacetime theory can attribute more or less such structure, and some parts of that structure may determine other parts. The nature of these structures and their relations of determi- nation bear on the interpretation of the theory—what the world would be like if the theory were true (North, 2009). For example, the structures of spacetime might be taken as its ontological or conceptual posits, and the determination relations might indicate which of these structures is more fundamental (North, 2018). Different perspectives on these questions might also reveal structural similarities with other spacetime theories, providing the resources to articulate how the picture of the world that that theory provides is different (if at all) from what came before, and might be different from what is yet to come.1 ∗Juliusz Doboszewski, Laurenz Hudetz, Eleanor Knox, J.