Planetary Hypocycloid (Epicycloid) Mechanisms Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
On the Topology of Hypocycloid Curves
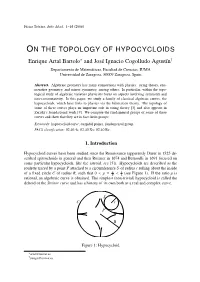
Física Teórica, Julio Abad, 1–16 (2008) ON THE TOPOLOGY OF HYPOCYCLOIDS Enrique Artal Bartolo∗ and José Ignacio Cogolludo Agustíny Departamento de Matemáticas, Facultad de Ciencias, IUMA Universidad de Zaragoza, 50009 Zaragoza, Spain Abstract. Algebraic geometry has many connections with physics: string theory, enu- merative geometry, and mirror symmetry, among others. In particular, within the topo- logical study of algebraic varieties physicists focus on aspects involving symmetry and non-commutativity. In this paper, we study a family of classical algebraic curves, the hypocycloids, which have links to physics via the bifurcation theory. The topology of some of these curves plays an important role in string theory [3] and also appears in Zariski’s foundational work [9]. We compute the fundamental groups of some of these curves and show that they are in fact Artin groups. Keywords: hypocycloid curve, cuspidal points, fundamental group. PACS classification: 02.40.-k; 02.40.Xx; 02.40.Re . 1. Introduction Hypocycloid curves have been studied since the Renaissance (apparently Dürer in 1525 de- scribed epitrochoids in general and then Roemer in 1674 and Bernoulli in 1691 focused on some particular hypocycloids, like the astroid, see [5]). Hypocycloids are described as the roulette traced by a point P attached to a circumference S of radius r rolling about the inside r 1 of a fixed circle C of radius R, such that 0 < ρ = R < 2 (see Figure 1). If the ratio ρ is rational, an algebraic curve is obtained. The simplest (non-trivial) hypocycloid is called the deltoid or the Steiner curve and has a history of its own both as a real and complex curve. -

Around and Around ______
Andrew Glassner’s Notebook http://www.glassner.com Around and around ________________________________ Andrew verybody loves making pictures with a Spirograph. The result is a pretty, swirly design, like the pictures Glassner EThis wonderful toy was introduced in 1966 by Kenner in Figure 1. Products and is now manufactured and sold by Hasbro. I got to thinking about this toy recently, and wondered The basic idea is simplicity itself. The box contains what might happen if we used other shapes for the a collection of plastic gears of different sizes. Every pieces, rather than circles. I wrote a program that pro- gear has several holes drilled into it, each big enough duces Spirograph-like patterns using shapes built out of to accommodate a pen tip. The box also contains some Bezier curves. I’ll describe that later on, but let’s start by rings that have gear teeth on both their inner and looking at traditional Spirograph patterns. outer edges. To make a picture, you select a gear and set it snugly against one of the rings (either inside or Roulettes outside) so that the teeth are engaged. Put a pen into Spirograph produces planar curves that are known as one of the holes, and start going around and around. roulettes. A roulette is defined by Lawrence this way: “If a curve C1 rolls, without slipping, along another fixed curve C2, any fixed point P attached to C1 describes a roulette” (see the “Further Reading” sidebar for this and other references). The word trochoid is a synonym for roulette. From here on, I’ll refer to C1 as the wheel and C2 as 1 Several the frame, even when the shapes Spirograph- aren’t circular. -

On the Topology of Hypocycloids
ON THE TOPOLOGY OF HYPOCYCLOIDS ENRIQUE ARTAL BARTOLO AND JOSE´ IGNACIO COGOLLUDO-AGUST´IN Abstract. Algebraic geometry has many connections with physics: string theory, enumerative geometry, and mirror symmetry, among others. In par- ticular, within the topological study of algebraic varieties physicists focus on aspects involving symmetry and non-commutativity. In this paper, we study a family of classical algebraic curves, the hypocycloids, which have links to physics via the bifurcation theory. The topology of some of these curves plays an important role in string theory [3] and also appears in Zariski’s foundational work [9]. We compute the fundamental groups of some of these curves and show that they are in fact Artin groups. 1. Introduction Hypocycloid curves have been studied since the Renaissance (apparently D¨urer in 1525 described epitrochoids in general and then Roemer in 1674 and Bernoulli in 1691 focused on some particular hypocycloids, like the astroid, see [5]). Hypocy- cloids are described as the roulette traced by a point P attached to a circumference S of radius r rolling about the inside of a fixed circle C of radius R, such that r 1 0 < ρ = R < 2 (see Figure 1). If the ratio ρ is rational, an algebraic curve is ob- tained. The simplest (non-trivial) hypocycloid is called the deltoid or the Steiner curve and has a history of its own both as a real and complex curve. S r C P arXiv:1703.08308v1 [math.AG] 24 Mar 2017 R Figure 1. Hypocycloid Key words and phrases. hypocycloid curve, cuspidal points, fundamental group. -

Deltoid* the Deltoid Curve Was Conceived by Euler in 1745 in Con
Deltoid* The Deltoid curve was conceived by Euler in 1745 in con- nection with his study of caustics. Formulas in 3D-XplorMath: x = 2 cos(t) + cos(2t); y = 2 sin(t) − sin(2t); 0 < t ≤ 2π; and its implicit equation is: (x2 + y2)2 − 8x(x2 − 3y2) + 18(x2 + y2) − 27 = 0: The Deltoid or Tricuspid The Deltoid is also known as the Tricuspid, and can be defined as the trace of a point on one circle that rolls inside * This file is from the 3D-XplorMath project. Please see: http://3D-XplorMath.org/ 1 2 another circle of 3 or 3=2 times as large a radius. The latter is called double generation. The figure below shows both of these methods. O is the center of the fixed circle of radius a, C the center of the rolling circle of radius a=3, and P the tracing point. OHCJ, JPT and TAOGE are colinear, where G and A are distant a=3 from O, and A is the center of the rolling circle with radius 2a=3. PHG is colinear and gives the tangent at P. Triangles TEJ, TGP, and JHP are all similar and T P=JP = 2 . Angle JCP = 3∗Angle BOJ. Let the point Q (not shown) be the intersection of JE and the circle centered on C. Points Q, P are symmetric with respect to point C. The intersection of OQ, PJ forms the center of osculating circle at P. 3 The Deltoid has numerous interesting properties. Properties Tangent Let A be the center of the curve, B be one of the cusp points,and P be any point on the curve. -

Entry Curves
ENTRY CURVES [ENTRY CURVES] Authors: Oliver Knill, Andrew Chi, 2003 Literature: www.mathworld.com, www.2dcurves.com astroid An [astroid] is the curve t (cos3(t); a sin3(t)) with a > 0. An asteroid is a 4-cusped hypocycloid. It is sometimes also called a tetracuspid,7! cubocycloid, or paracycle. Archimedes spiral An [Archimedes spiral] is a curve described as the polar graph r(t) = at where a > 0 is a constant. In words: the distance r(t) to the origin grows linearly with the angle. bowditch curve The [bowditch curve] is a special Lissajous curve r(t) = (asin(nt + c); bsin(t)). brachistochone A [brachistochone] is a curve along which a particle will slide in the shortest time from one point to an other. It is a cycloid. Cassini ovals [Cassini ovals] are curves described by ((x + a) + y2)((x a)2 + y2) = k4, where k2 < a2 are constants. They are named after the Italian astronomer Goivanni Domenico− Cassini (1625-1712). Geometrically Cassini ovals are the set of points whose product to two fixed points P = ( a; 0); Q = (0; 0) in the plane is the constant k 2. For k2 = a2, the curve is called a Lemniscate. − cardioid The [cardioid] is a plane curve belonging to the class of epicycloids. The fact that it has the shape of a heart gave it the name. The cardioid is the locus of a fixed point P on a circle roling on a fixed circle. In polar coordinates, the curve given by r(φ) = a(1 + cos(φ)). catenary The [catenary] is the plane curve which is the graph y = c cosh(x=c). -
Iterating Evolutes and Involutes
Iterating evolutes and involutes Work in progress with M. Arnold, D. Fuchs, I. Izmestiev, and E. Tsukerman Integrability in Mechanics and Geometry: Theory and Computations June 2015 1 2 Evolutes and involutes Evolute: the envelope of the normals, the locus of the centers of curvature; free from inflections and has zero algebraic length. Involute: string construction; come in 1-parameter families. 3 Hedgehogs Wave fronts without inflection and total rotation 2π, given by their support function p(α). ....................................... ....................................... ...................................... .................. .................. π ........... .......... ........ ........ .............. α + ...... .... ...... ......... ..... .... ..... ...... .... .... ........ 2 .... .... ....... .... .... .... ...... .... .. .... ....... .. .. ........... .. ..... ......... ....... p!(α).......... .... ....... .. ........... .... .. ...... ... .......... .... ... ....... .... .......... .... .... ....... .... ......... .... .......... ..... ........ .... ......... ..... O ..... .... ......... ....... γ ..... .......... ........ ..... ........... .... ........... •......p(α) ................ .... ..................... ...... ........................... .... ....................................................................................................... ....... .... ...... ....... .... ............ .... .......... .... ....... ..... ..... ....... ..... .α The evolute map: p(α) 7! p0(α − π=2), invertible on functions with zero -

Collected Atos
Mathematical Documentation of the objects realized in the visualization program 3D-XplorMath Select the Table Of Contents (TOC) of the desired kind of objects: Table Of Contents of Planar Curves Table Of Contents of Space Curves Surface Organisation Go To Platonics Table of Contents of Conformal Maps Table Of Contents of Fractals ODEs Table Of Contents of Lattice Models Table Of Contents of Soliton Traveling Waves Shepard Tones Homepage of 3D-XPlorMath (3DXM): http://3d-xplormath.org/ Tutorial movies for using 3DXM: http://3d-xplormath.org/Movies/index.html Version November 29, 2020 The Surfaces Are Organized According To their Construction Surfaces may appear under several headings: The Catenoid is an explicitly parametrized, minimal sur- face of revolution. Go To Page 1 Curvature Properties of Surfaces Surfaces of Revolution The Unduloid, a Surface of Constant Mean Curvature Sphere, with Stereographic and Archimedes' Projections TOC of Explicitly Parametrized and Implicit Surfaces Menu of Nonorientable Surfaces in previous collection Menu of Implicit Surfaces in previous collection TOC of Spherical Surfaces (K = 1) TOC of Pseudospherical Surfaces (K = −1) TOC of Minimal Surfaces (H = 0) Ward Solitons Anand-Ward Solitons Voxel Clouds of Electron Densities of Hydrogen Go To Page 1 Planar Curves Go To Page 1 (Click the Names) Circle Ellipse Parabola Hyperbola Conic Sections Kepler Orbits, explaining 1=r-Potential Nephroid of Freeth Sine Curve Pendulum ODE Function Lissajous Plane Curve Catenary Convex Curves from Support Function Tractrix -

The Astroid, the Deltoid and the Fish Within the Fish
The astroid, the deltoid and the fish within the fish 1 Prologue oṃ hrīṃ bhuvaneśvaryai namaḥ | We start by worshiping Devī Bhuvaneśvarī the mistress of the cakra in the form of the astroid. As a kid the light from the street lamp used to pass through the corrugated glass of the win- dow in our room and produce some interesting curves. The most prominent of these was one with four cusps, which we learned from a book of our father to be an astroid. We soon discovered for ourselves that it could be constructed using the spirograph principle: when rotated inside another circle, with radius 4 times its radius, a point a point on the circumference of a circle traces out an astroid (Figure 1). Likewise, when we did the same with circles that had radii in the ratio of 1:3 we got a tricuspid curve that we learned was called the deltoid (Figure 2). Finally, when we did this with circles having radii in the ratio of 1:2 we got the diameter of the larger circle (Figure 3). In doing so we had recapitulated what the Hashishin marūnmatta scientist Nasir al-din al-Tusi had done in the days of the Il-Khan Hulegu. This also corresponded to what we could learn about the construction of this family of curves, namely the hypocycloids, from our father’s book. However, we were keen to have other means for constructing these curves because our spirograph could not draw them properly as the hole for the pen was not ideally positioned. -

Fifty Famous Curves, Lots of Calculus Questions, and a Few Answers
Department of Mathematics, Computer Science, and Statistics Bloomsburg University Bloomsburg, Pennsylvania 17815 Fifty Famous Curves, Lots of Calculus Questions, And a Few Answers Summary Sophisticated calculators have made it easier to carefully sketch more complicated and interesting graphs of equations given in Cartesian form, polar form, or parametrically. These elegant curves, for example, the Bicorn, Catesian Oval, and Freeth's Nephroid, lead to many challenging calculus questions concerning arc length, area, volume, tangent lines, and more. The curves and questions presented are a source for extra, varied AP-type problems and appeal especially to those who learned calculus before graphing calculators. Address: Stephen Kokoska Department of Mathematics, Computer Science, and Statistics Bloomsburg University 400 East Second Street Bloomsburg, PA 17815 Phone: (570) 389-4629 Email: [email protected] 1. Astroid Cartesian Equation: y 2 3 2 3 2 3 a x = + y = = a = Parametric Equations: 3 x(t) = a cos t 3 y(t) = a sin t a a x ¡ PSfrag replacements a ¡ Facts: (a) Also called the tetracuspid because it has four cusps. (b) Curve can be formed by rolling a circle of radius a=4 on the inside of a circle of radius a. (c) The curve can also be formed as the envelop produced when a line segment is moved with each end on one of a pair of perpendicular axes (glissette). Calculus Questions: (a) Find the length of the astroid. (b) Find the area of the astroid. (c) Find the equation of the tangent line to the astroid with t = θ0. (d) Suppose a tangent line to the astroid intersects the x-axis at X and the y-axis at Y . -
A Handbook on Curves and Their Properties
SEELEY G. 1 1UDD LIBRARY LAWRENCE UNIVERSITY Appleton, Wisconsin «__ CURVES AND THEIR PROPERTIES A HANDBOOK ON CURVES AND THEIR PROPERTIES ROBERT C. YATES United States Military Academy J. W. EDWARDS — ANN ARBOR — 1947 97226 NOTATION octangular C olar Coordin =r.t^r ini Tangent and the Rad ,- ^lem a Copyright 1947 by R m Origin to Tangent. i i = /I. f(s ) = C well Intrinsic Egua 9 ;(f «r,p) = C 1- Lithoprinted by E rlll CONTENTS PREFACE nephroid and teacher lume proposes to supply to student curves. Rather ,n properties of plane Pedal Curves e Pedal Equations U vhi C h might be found ^ Yc 31 r , 'f Lr!-ormation and in engine useful in the classroom 3 aid in the s Radial Curves alphabetical arrangement is Roulettes Semi-Cubic Parabola Sketching Evolutes, Curve Sketching, and Spirals Strophoid If 1 :s readily understandable. Trigonometric Functions .... Trochoids Witch of Agnesi bfi Stropho: i including the Astroid, HISTORY: The Cycloidal curves, discovered by Roemer (1674) In his search for the Space Is provided occasionally for the reader to ir ;,„ r e for gear teeth. Double generation was first sert notes, proofs, and references of his own and thus be st form noticed by Daniel Bernoulli in 1725- It is with pleasure that the author acknowledges a hypo loid o f f ur valuable assistance in the composition of this work. 1. DESCRIPTION: The d is y Mr. H. T. Guard criticized the manuscript and offered Le roll helpful suggestions; Mr. Charles Roth and Mr. William radius four Lmes as la ge- -oiling upon the ins fixed circle (See Epicycloids) ASTROID EQUATIONS: = cos 1 1 1 (f)(3 x + - a y sin [::::::: = (f)(3 :ion: (Fig. -

The Cissoid of Diocles
Playing With Dynamic Geometry by Donald A. Cole Copyright © 2010 by Donald A. Cole All rights reserved. Cover Design: A three-dimensional image of the curve known as the Lemniscate of Bernoulli and its graph (see Chapter 15). TABLE OF CONTENTS Preface.................................................................................................................. xix Chapter 1 – Background ............................................................ 1-1 1.1 Introduction ............................................................................................................ 1-1 1.2 Equations and Graph .............................................................................................. 1-1 1.3 Analytical and Physical Properties ........................................................................ 1-4 1.3.1 Derivatives of the Curve ................................................................................. 1-4 1.3.2 Metric Properties of the Curve ........................................................................ 1-4 1.3.3 Curvature......................................................................................................... 1-6 1.3.4 Angles ............................................................................................................. 1-6 1.4 Geometric Properties ............................................................................................. 1-7 1.5 Types of Derived Curves ....................................................................................... 1-7 1.5.1 Evolute -

ASTROID - NEPHROID DELTOID - CARDIOID ORTHOCYCLOIDALS - Part XVIII
ASTROID - NEPHROID DELTOID - CARDIOID ORTHOCYCLOIDALS - Part XVIII - C. Masurel 08/01/2017 Abstract Astroid and Nephroid are close curves with many relations. They are special examples of hypercycles proposed by Laguerre to generalize polarity in the plane for curves of class four by analogy with polarity for conics of class two. We present a transformation that links couples of orthocycloidals and curves transformed by central inversion and apply it to astroid/nephroid and deltoid/cardioid. We also give a proof of an old central polar equation of the Nephroid. 1 Epicycloids, hypocycloids and orthocycloidals We have seen in part XIV that couples of ortho cycloidals can move inside a couple of epi- and hypo-cycloids in such a way that all cusps stay on epi- and hypo-cycloids and the curves pass through their common cusps and keep orthogonal crossing. F. Morley in [6] indicates that "the only points at infinity of cycloidals of degree 2p are the cyclic points I and J counted each p times. In the epicy- cloid the singular tangents at I and J are directed to the origin, where all the foci are collected. The center being the mean of the foci, the origin is also the center of the curve. Inthe epicycloid the line IJ is the singular tangent at both I and J, and there are no finite foci." This is an incitement to study cycloidals in polar coordinates with O at the center of the fixed circle of the cycloidal. So we examine some special cases of orthocycloidals using central polar equa- tion of cycloidals of F.