ASTROID - NEPHROID DELTOID - CARDIOID ORTHOCYCLOIDALS - Part XVIII
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
On the Topology of Hypocycloid Curves
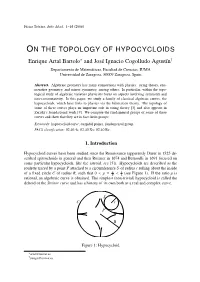
Física Teórica, Julio Abad, 1–16 (2008) ON THE TOPOLOGY OF HYPOCYCLOIDS Enrique Artal Bartolo∗ and José Ignacio Cogolludo Agustíny Departamento de Matemáticas, Facultad de Ciencias, IUMA Universidad de Zaragoza, 50009 Zaragoza, Spain Abstract. Algebraic geometry has many connections with physics: string theory, enu- merative geometry, and mirror symmetry, among others. In particular, within the topo- logical study of algebraic varieties physicists focus on aspects involving symmetry and non-commutativity. In this paper, we study a family of classical algebraic curves, the hypocycloids, which have links to physics via the bifurcation theory. The topology of some of these curves plays an important role in string theory [3] and also appears in Zariski’s foundational work [9]. We compute the fundamental groups of some of these curves and show that they are in fact Artin groups. Keywords: hypocycloid curve, cuspidal points, fundamental group. PACS classification: 02.40.-k; 02.40.Xx; 02.40.Re . 1. Introduction Hypocycloid curves have been studied since the Renaissance (apparently Dürer in 1525 de- scribed epitrochoids in general and then Roemer in 1674 and Bernoulli in 1691 focused on some particular hypocycloids, like the astroid, see [5]). Hypocycloids are described as the roulette traced by a point P attached to a circumference S of radius r rolling about the inside r 1 of a fixed circle C of radius R, such that 0 < ρ = R < 2 (see Figure 1). If the ratio ρ is rational, an algebraic curve is obtained. The simplest (non-trivial) hypocycloid is called the deltoid or the Steiner curve and has a history of its own both as a real and complex curve. -

Around and Around ______
Andrew Glassner’s Notebook http://www.glassner.com Around and around ________________________________ Andrew verybody loves making pictures with a Spirograph. The result is a pretty, swirly design, like the pictures Glassner EThis wonderful toy was introduced in 1966 by Kenner in Figure 1. Products and is now manufactured and sold by Hasbro. I got to thinking about this toy recently, and wondered The basic idea is simplicity itself. The box contains what might happen if we used other shapes for the a collection of plastic gears of different sizes. Every pieces, rather than circles. I wrote a program that pro- gear has several holes drilled into it, each big enough duces Spirograph-like patterns using shapes built out of to accommodate a pen tip. The box also contains some Bezier curves. I’ll describe that later on, but let’s start by rings that have gear teeth on both their inner and looking at traditional Spirograph patterns. outer edges. To make a picture, you select a gear and set it snugly against one of the rings (either inside or Roulettes outside) so that the teeth are engaged. Put a pen into Spirograph produces planar curves that are known as one of the holes, and start going around and around. roulettes. A roulette is defined by Lawrence this way: “If a curve C1 rolls, without slipping, along another fixed curve C2, any fixed point P attached to C1 describes a roulette” (see the “Further Reading” sidebar for this and other references). The word trochoid is a synonym for roulette. From here on, I’ll refer to C1 as the wheel and C2 as 1 Several the frame, even when the shapes Spirograph- aren’t circular. -

On the Topology of Hypocycloids
ON THE TOPOLOGY OF HYPOCYCLOIDS ENRIQUE ARTAL BARTOLO AND JOSE´ IGNACIO COGOLLUDO-AGUST´IN Abstract. Algebraic geometry has many connections with physics: string theory, enumerative geometry, and mirror symmetry, among others. In par- ticular, within the topological study of algebraic varieties physicists focus on aspects involving symmetry and non-commutativity. In this paper, we study a family of classical algebraic curves, the hypocycloids, which have links to physics via the bifurcation theory. The topology of some of these curves plays an important role in string theory [3] and also appears in Zariski’s foundational work [9]. We compute the fundamental groups of some of these curves and show that they are in fact Artin groups. 1. Introduction Hypocycloid curves have been studied since the Renaissance (apparently D¨urer in 1525 described epitrochoids in general and then Roemer in 1674 and Bernoulli in 1691 focused on some particular hypocycloids, like the astroid, see [5]). Hypocy- cloids are described as the roulette traced by a point P attached to a circumference S of radius r rolling about the inside of a fixed circle C of radius R, such that r 1 0 < ρ = R < 2 (see Figure 1). If the ratio ρ is rational, an algebraic curve is ob- tained. The simplest (non-trivial) hypocycloid is called the deltoid or the Steiner curve and has a history of its own both as a real and complex curve. S r C P arXiv:1703.08308v1 [math.AG] 24 Mar 2017 R Figure 1. Hypocycloid Key words and phrases. hypocycloid curve, cuspidal points, fundamental group. -

Deltoid* the Deltoid Curve Was Conceived by Euler in 1745 in Con
Deltoid* The Deltoid curve was conceived by Euler in 1745 in con- nection with his study of caustics. Formulas in 3D-XplorMath: x = 2 cos(t) + cos(2t); y = 2 sin(t) − sin(2t); 0 < t ≤ 2π; and its implicit equation is: (x2 + y2)2 − 8x(x2 − 3y2) + 18(x2 + y2) − 27 = 0: The Deltoid or Tricuspid The Deltoid is also known as the Tricuspid, and can be defined as the trace of a point on one circle that rolls inside * This file is from the 3D-XplorMath project. Please see: http://3D-XplorMath.org/ 1 2 another circle of 3 or 3=2 times as large a radius. The latter is called double generation. The figure below shows both of these methods. O is the center of the fixed circle of radius a, C the center of the rolling circle of radius a=3, and P the tracing point. OHCJ, JPT and TAOGE are colinear, where G and A are distant a=3 from O, and A is the center of the rolling circle with radius 2a=3. PHG is colinear and gives the tangent at P. Triangles TEJ, TGP, and JHP are all similar and T P=JP = 2 . Angle JCP = 3∗Angle BOJ. Let the point Q (not shown) be the intersection of JE and the circle centered on C. Points Q, P are symmetric with respect to point C. The intersection of OQ, PJ forms the center of osculating circle at P. 3 The Deltoid has numerous interesting properties. Properties Tangent Let A be the center of the curve, B be one of the cusp points,and P be any point on the curve. -

Differential Geometry of Curves and Surfaces 1
DIFFERENTIAL GEOMETRY OF CURVES AND SURFACES 1. Curves in the Plane 1.1. Points, Vectors, and Their Coordinates. Points and vectors are fundamental objects in Geometry. The notion of point is intuitive and clear to everyone. The notion of vector is a bit more delicate. In fact, rather than saying what a vector is, we prefer to say what a vector has, namely: direction, sense, and length (or magnitude). It can be represented by an arrow, and the main idea is that two arrows represent the same vector if they have the same direction, sense, and length. An arrow representing a vector has a tail and a tip. From the (rough) definition above, we deduce that in order to represent (if you want, to draw) a given vector as an arrow, it is necessary and sufficient to prescribe its tail. a c b b a c a a b P Figure 1. We see four copies of the vector a, three of the vector b, and two of the vector c. We also see a point P . An important instrument in handling points, vectors, and (consequently) many other geometric objects is the Cartesian coordinate system in the plane. This consists of a point O, called the origin, and two perpendicular lines going through O, called coordinate axes. Each line has a positive direction, indicated by an arrow (see Figure 2). We denote by R the a P y a y x O O x Figure 2. The point P has coordinates x, y. The vector a has also coordinates x, y. -

Pedal Equation and Kepler Kinematics
Canadian Journal of Physics Pedal equation and Kepler kinematics Journal: Canadian Journal of Physics Manuscript ID cjp-2019-0347.R2 Manuscript Type: Tutorial Date Submitted by the For11-Aug-2020 Review Only Author: Complete List of Authors: Nathan, Joseph Amal; Bhabha Atomic Research Centre, Reactor Physics Design Division Pin and string construction of conics, Pedal equation, Central force field, Keyword: Conservation laws, Trajectories and Kepler laws Is the invited manuscript for consideration in a Special Not applicable (regular submission) Issue? : © The Author(s) or their Institution(s) Page 1 of 9 Canadian Journal of Physics Pedal equation and Kepler kinematics Joseph Amal Nathan Reactor Physics Design Division Bhabha Atomic Research Center, Mumbai-400 085, India August 12, 2020 For Review Only Abstract: Kepler's laws is an appropriate topic which brings out the signif- icance of pedal equation in Physics. There are several articles which obtain the Kepler's laws as a consequence of the conservation and gravitation laws. This can be shown more easily and ingeniously if one uses the pedal equation of an Ellipse. In fact the complete kinematics of a particle in a attractive central force field can be derived from one single pedal form. Though many articles use the pedal equation, only in few the classical procedure (without proof) for obtaining the pedal equation is mentioned. The reason being the classical derivations can sometimes be lengthier and also not simple. In this paper using elementary physics we derive the pedal equation for all conic sections in an unique, short and pedagogical way. Later from the dynamics of a particle in the attractive central force field we deduce the single pedal form, which elegantly describes all the possible trajectories. -

Differential Calculus
A TEX T -B O O K OF DIFFERENTIAL CALCULUS WITH NUMEROU S WORK ED OUT EXAMPLES GANE S B A A A B . NT . (C ) E B ER F E L O ND O N E I C S CIE Y F E D E U SC E M M O TH MATH MAT AL O T , O TH T H MA E IK ER-V EREI IGU G F E CIRC E IC DI P ER E C TH MAT N N , O TH OLO MAT MAT O AL MO , T . FELLOW OF THE U NIVE RSITY OF ALLAHAB AD ’ AND P R FESS R OF E I CS I UEE S C O E G E B E RES O O MATH MAT N Q N LL , NA E N L O N G M A N ! G R E , A N D C O 3 PAT ER TE ND 9 N O S R R OW , L O ON NEW YORK B OMBAY AND AL UTTA , , C C 1 909 A l l r i g h t s r e s e r v e d P E FA E R C . IN thi s work it h as b een my aim to lay before st ud ents a l r orou s and at th e sam e t me s m le ex osit on of stri ct y ig , i , i p p i lculu s nd it c f lic n T th e Differential C a a s hi e app ati o s . -

Entry Curves
ENTRY CURVES [ENTRY CURVES] Authors: Oliver Knill, Andrew Chi, 2003 Literature: www.mathworld.com, www.2dcurves.com astroid An [astroid] is the curve t (cos3(t); a sin3(t)) with a > 0. An asteroid is a 4-cusped hypocycloid. It is sometimes also called a tetracuspid,7! cubocycloid, or paracycle. Archimedes spiral An [Archimedes spiral] is a curve described as the polar graph r(t) = at where a > 0 is a constant. In words: the distance r(t) to the origin grows linearly with the angle. bowditch curve The [bowditch curve] is a special Lissajous curve r(t) = (asin(nt + c); bsin(t)). brachistochone A [brachistochone] is a curve along which a particle will slide in the shortest time from one point to an other. It is a cycloid. Cassini ovals [Cassini ovals] are curves described by ((x + a) + y2)((x a)2 + y2) = k4, where k2 < a2 are constants. They are named after the Italian astronomer Goivanni Domenico− Cassini (1625-1712). Geometrically Cassini ovals are the set of points whose product to two fixed points P = ( a; 0); Q = (0; 0) in the plane is the constant k 2. For k2 = a2, the curve is called a Lemniscate. − cardioid The [cardioid] is a plane curve belonging to the class of epicycloids. The fact that it has the shape of a heart gave it the name. The cardioid is the locus of a fixed point P on a circle roling on a fixed circle. In polar coordinates, the curve given by r(φ) = a(1 + cos(φ)). catenary The [catenary] is the plane curve which is the graph y = c cosh(x=c). -

Geometry of the Cardioid
Geometry of the Cardioid Arseniy V Akopyan Abstract In this note, we discuss the cardiod. We give purely geometric proofs of its well-known properties. Definitions and Basic Properties The curve in Figure 1 is called a cardioid. The name is derived from the Greek word \καρδια" meaning \heart". A cardioid has many interesting properties and very often appears in different fields of mathematics and physics. The study of geometric properties of remarkable curves is a classical topic in analytic and differential geometry. In this note, we focus mainly on the purely synthetic approach to the geometry of the cardioid. In the polar coordinate system, the cardioid has the following equation: Fig. 1 r = 1 − cos ': (*) In this article, we consider the geometric properties of a cardioid, so let us give a geometric definition. Take a circle of diameter 1 and let another circle of the same size roll around the exterior of the first one. Then the trace of a fixed point on the second circle will be a cardioid (Fig. 2). B O0 P V O AA ! Fig. 2 Fig. 3 This definition is not so useful for studying a cardioid (but actually it will help us later), so we restate the same definition in purely geometrical terms. Let ! be a circle with center O, A a point on it, and P a point moving along ! (Fig. 3). Suppose O0 is the point symmetric to O in P . Let B be the reflection of 0 0 0 A in the perpendicular bisector to OO . Notice that \BO P = \P OA and O B = OA. -
WA35 188795 11772-1 13.Pdf
CHAPTER XIII. QUADRATURE (II). TANGENTIAL POLARS, PEDAL EQUATIONS AND PEDAL CURVES, INTRINSIC EQUATIONS, ETC. 416. Other Expressions for an Area Many other expressions may be deduced for the area of a plane curve, or proved independently, specially adapted to the cases when the curve is defined by systems of coordinates other than Cartesians or Polars, or for regions bounded in a particular manner. To avoid continual redefinition of the symbols used we may state that in the subsequent work the letters have the meanings assigned to them throughout the treatment of Curvature in the author’s Differential Calculus. 417. The (p, s) formula. Fig. 61. Let PQ be an element δs of a plane curve and OY the per pendicular from the pole upon the chord PQ. Then 438 www.rcin.org.pl TANGENTIAL-POLAR CURVES. 439 and any sectorial area the summation being conducted along the whole bounding arc. In the notation of the Integral Calculus this is 1/2∫pds. This might be deduced from the polar formula at once. For where ϕ is the angle between the tangent and the radius vector. 418. Tangential-Polar Form (p, ψ). Again, since we have Area a form suitable for use when the Tangential-Polar (i.e. p, ψ) form of the equation to the curve is given. This gives the sectorial area bounded by the curve and the initial and final radii vectores. 419. Caution. In using the formula care should be taken not to integrate over a point, between the proposed limits, at which the integrand changes sign. -

On the Theory of Rolling Curves. by Mr JAMES CLERK MAXWELL. Communicated by the Rev. Professor KELLAND. There Is
( 519 ) XXXV.—On the Theory of Rolling Curves. By Mr JAMES CLERK MAXWELL. Communicated by the Rev. Professor KELLAND. (Read, 19th February 1849.) There is an important geometrical problem which proposes to find a curve having a given relation to a series of curves described according to a given law. This is the problem of Trajectories in its general form. The series of curves is obtained from the general equation to a curve by the variation of its parameters. In the general case, this variation may change the form of the curve, but, in the case which we are about to consider, the curve is changed only in position. This change of position takes place partly by rotation, and partly by trans- ference through space. The rolling of one curve on another is an example of this compound motion. As examples of the way in which the new curve may be related to the series of curves, we may take the following:— 1. The new curve may cut the series of curves at a given angle. When this angle becomes zero, the curve is the envelope of the series of curves. 2. It may pass through corresponding points in the series of curves. There are many other relations which may be imagined, but we shall confine our atten- tion to this, partly because it affords the means of tracing various curves, and partly on account of the connection which it has with many geometrical problems. Therefore the subject of this paper will be the consideration of the relations of three curves, one of which is fixed, while the second rolls upon it and traces the third. -
Iterating Evolutes and Involutes
Iterating evolutes and involutes Work in progress with M. Arnold, D. Fuchs, I. Izmestiev, and E. Tsukerman Integrability in Mechanics and Geometry: Theory and Computations June 2015 1 2 Evolutes and involutes Evolute: the envelope of the normals, the locus of the centers of curvature; free from inflections and has zero algebraic length. Involute: string construction; come in 1-parameter families. 3 Hedgehogs Wave fronts without inflection and total rotation 2π, given by their support function p(α). ....................................... ....................................... ...................................... .................. .................. π ........... .......... ........ ........ .............. α + ...... .... ...... ......... ..... .... ..... ...... .... .... ........ 2 .... .... ....... .... .... .... ...... .... .. .... ....... .. .. ........... .. ..... ......... ....... p!(α).......... .... ....... .. ........... .... .. ...... ... .......... .... ... ....... .... .......... .... .... ....... .... ......... .... .......... ..... ........ .... ......... ..... O ..... .... ......... ....... γ ..... .......... ........ ..... ........... .... ........... •......p(α) ................ .... ..................... ...... ........................... .... ....................................................................................................... ....... .... ...... ....... .... ............ .... .......... .... ....... ..... ..... ....... ..... .α The evolute map: p(α) 7! p0(α − π=2), invertible on functions with zero