Development of a Single Selenocentric Reference System on the Basis Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Evolved International Lunar Decade Global Exploration Roadmap
Lunar Exploration Analysis Group (2015) 2016.pdf An Evolved International Lunar Decade Global Exploration Roadmap. David Dunlop. Author1 and Kim Hold- er. Author2, 1 National Space Society, 410 Ashland Ave, Green Bay Wisconsin, [email protected], 2 National Space Society (Patzcuaro, Michoacan, Mexico, Kim [email protected]). Introduction: Since 2007 an International 1 The 2013 GER edition did not reflect the Chinese Space Exploration Coordination Group (ISECG) of 14 government lunar mission series beginning with the of the largest national space agencies has met to look at 2013 Chang’e III successful landing, and reflecting the potential of collaborative planning and coordina- Chang’e IV (now scheduled for 2020 targeting the tion of their national space exploration activities. lunar farside, Change’e V (sample return now sched- While these meetings have generally been closed door uled for 2017) with a Change’6 Mission indicated as a back-up to the sample return mission. (3) events a 2013 edition Global Exploration Roadmap 2 The GER did not reflect any of the Google Lunar X- (GER) was produced (signed off) by 12 of the 14 coun- Prize Missions. Several teams such as Astrobotic and tries reflecting their projected space program activities Moon-X and Team Space IL have received significant in the categories: Low Earth Orbit, Lunar Vicinity, financial support, have developed flight hardware, and Moon, Mars, Asteroids, and Transportation.(1) This while slipping behind the earlier 2015 deadline are GER is a formidable measure of collaborative efforts planning missions to the Moon perhaps succeeding in and spirits and a reflection of significant global coop- 2016 or when more affordable reusable launchers be- eration. -

New Candidate Pits and Caves at High Latitudes on the Near Side of the Moon
52nd Lunar and Planetary Science Conference 2021 (LPI Contrib. No. 2548) 2733.pdf NEW CANDIDATE PITS AND CAVES AT HIGH LATITUDES ON THE NEAR SIDE OF THE MOON. 1,2 1,3,4 1 2 Wynnie Avent II and Pascal Lee , S ETI Institute, Mountain View, VA, USA, V irginia Polytechnic Institute 3 4 and State University Blacksburg, VA, USA. M ars Institute, N ASA Ames Research Center. Summary: 35 new candidate pits are identified in Anaxagoras and Philolaus, two high-latitude impact structures on the near side of the Moon. Introduction: Since the discovery in 2009 of the Marius Hills Pit (Haruyama et al. 2009), a.k.a. the “Haruyama Cavern”, over 300 hundred pits have been identified on the Moon (Wagner & Robinson 2014, Robinson & Wagner 2018). Lunar pits are small (10 to 150 m across), steep-walled, negative relief features (topographic depressions), surrounded by funnel-shaped outer slopes and, unlike impact craters, no raised rim. They are interpreted as collapse features resulting from the fall of the roof of shallow (a few Figure 1: Location of studied craters (Polar meters deep) subsurface voids, generally lava cavities. projection). Although pits on the Moon are found in mare basalt, impact melt deposits, and highland terrain of the >300 Methods: Like previous studies searching for pits pits known, all but 16 are in impact melts (Robinson & (Wagner & Robinson 2014, Robinson & Wagner 2018, Wagner 2018). Many pits are likely lava tube skylights, Lee 2018a,b,c), we used imaging data collected by the providing access to underground networks of NASA Lunar Reconnaissance Orbiter (LRO) Narrow tunnel-shaped caves, including possibly complex Angle Camera (NAC). -

Instruction Manual
IINNSSTTRRUUCCTTIIOONN MMAANNUUAALL NexStar 60 . NexStar 80 . NexStar 102 . NexStar 114 . NexStar 130 T A B L E O F C O N T E N T S INTRODUCTION ............................................................................................................................................................ 4 Warning .......................................................................................................................................................................... 4 ASSEMBLY ...................................................................................................................................................................... 7 Assembling the NexStar ................................................................................................................................................. 7 Attaching the Hand Control Holder ............................................................................................................................ 8 Attaching the Fork Arm to the Tripod......................................................................................................................... 8 Attaching the Telescope to the Fork Arm ................................................................................................................... 8 The Star Diagonal ....................................................................................................................................................... 8 The Eyepiece.............................................................................................................................................................. -

Lab # 12: Surface of the Moon
Name: Date: 12 Surface of the Moon 12.1 Introduction One can learn a lot about the Moon by looking at the lunar surface. Even before astronauts landed on the Moon, scientists had enough data to formulate theories about the formation and evolution of the Earth’s only natural satellite. However, since the Moon rotates once for every time it orbits around the Earth, we can only see one side of the Moon from the surface of the Earth. Until spacecraft were sent to orbit the Moon, we only knew half the story. The type of orbit our Moon makes around the Earth is called a synchronous orbit. This phenomenon is shown graphically in Figure 12.1 below. If we imagine that there is one large mountain on the hemisphere facing the Earth (denoted by the small triangle on the Moon), then this mountain is always visible to us no matter where the Moon is in its orbit. As the Moon orbits around the Earth, it turns slightly so we always see the same hemisphere. Figure 12.1: The Moon’s synchronous orbit. (Not drawn to scale.) On the Moon, there are extensive lava flows, rugged highlands and many impact craters of all sizes. The overlapping of these features implies relative ages. Because of the lack of ongoing mountain building processes, or weathering by wind and water, the accumulation of volcanic processes and impact cratering is readily visible. Thus by looking at the images of the Moon, one can trace the history of the lunar surface. 129 Lab Goals: to discuss the Moon’s terrain, craters, and the theory of relative ages; to • use pictures of the Moon to deduce relative ages and formation processes of surface features Materials: Moon pictures, ruler, calculator • 12.2 Craters and Maria A crater is formed when a meteor from space strikes the lunar surface. -

Glossary Glossary
Glossary Glossary Albedo A measure of an object’s reflectivity. A pure white reflecting surface has an albedo of 1.0 (100%). A pitch-black, nonreflecting surface has an albedo of 0.0. The Moon is a fairly dark object with a combined albedo of 0.07 (reflecting 7% of the sunlight that falls upon it). The albedo range of the lunar maria is between 0.05 and 0.08. The brighter highlands have an albedo range from 0.09 to 0.15. Anorthosite Rocks rich in the mineral feldspar, making up much of the Moon’s bright highland regions. Aperture The diameter of a telescope’s objective lens or primary mirror. Apogee The point in the Moon’s orbit where it is furthest from the Earth. At apogee, the Moon can reach a maximum distance of 406,700 km from the Earth. Apollo The manned lunar program of the United States. Between July 1969 and December 1972, six Apollo missions landed on the Moon, allowing a total of 12 astronauts to explore its surface. Asteroid A minor planet. A large solid body of rock in orbit around the Sun. Banded crater A crater that displays dusky linear tracts on its inner walls and/or floor. 250 Basalt A dark, fine-grained volcanic rock, low in silicon, with a low viscosity. Basaltic material fills many of the Moon’s major basins, especially on the near side. Glossary Basin A very large circular impact structure (usually comprising multiple concentric rings) that usually displays some degree of flooding with lava. The largest and most conspicuous lava- flooded basins on the Moon are found on the near side, and most are filled to their outer edges with mare basalts. -
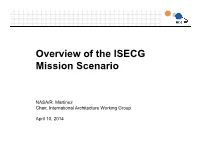
Overview of the ISECG Mission Scenario
Overview of the ISECG Mission Scenario NASA/R. Martinez Chair, International Architecture Working Group April 10, 2014 ISECG Mission Scenario 2020 2030 Low-Earth Orbit International Space Station Robotic Mission Commercial or Government-Owned Platforms Human Mission Beyond Low-Earth Orbit Cargo Mission Test Missions Asteroid Redirection Rosetta Hayabusa-2 OSIRIS-REx (Sample Return) (Sample Return) Explore Near Earth Asteroid Near-Earth Objects Apophis Extended Staging Post for Crew Duration to Lunar Surface Lunar Vicinity Crew Missions Potential Commercial Opportunities LADEE Luna 25 Luna 26 Luna 27 RESOLVE SELENE-2 Luna 28/29 SELENE-3 Human-Assisted (Sample Sample Return Humans to Lunar Surface Chandrayaan-2 Return) Moon Potential Commercial Opportunities Human-Assisted Sample Return Sustainable Human MAVEN ISRO Mars ExoMars InSight ExoMars Mars JAXA Mars Sample Return Mission Missions to the Orbiter Mission 2016 2018 2020 Mars Opportunities Mars System Mars Precursor Human Scale EDL Test Mission Opportunities Multi-Destination Small Human Transportation Cargo Surface Capabilities Initial Lander Mobility (Planned and Conceptual) Cargo Delivery Evolvable Orion Russian Advanced Deep Space Orion Orion & Icon indicates first use opportunity. & Piloted Electric & SLS Crewed SLS Commercial/Institutional launchers not shown. Habitat SLS Propulsion (Upgrade) Lunar (Upgrade) System Lander ISS for Exploraon Maturing cri+cal systems, tes+ng technologies, human research, & tes+ng ops techniques. Explora4on of a Near Earth Asteroid Human exploraon of an asteroid which has been captured and redirected to lunar vicinity Enabling Capabilies Contribu4ons to Mars Mission Readiness Demonstraon of the following core capabili+es: • Space Launch System and Orion • 30-50kW Solar Electric Propulsion NASA’s SLS Advanced Electric Extra Vehicular System and Orion Propulsion Ac4vity • Spacewalk, rendezvous, proximity operaons, docking or grapple, deep Mission Ac4vi4es space navigaon and communicaons. -
Lunariceprospecting V1.0.Pdf
WHITE PAPER Ice Prospecting: Your Guide to Getting Rich on the Moon Version 1.0 // May 2019 // This work is licensed under a Creative Commons Attribution-NoDerivatives 4.0 International License. Kevin M. Cannon ([email protected]) Introduction Water ice has been detected indirectly and directly within permanently shadowed regions (PSRs) at both poles of the Moon. This ice is stable against sublimation on billion-year timescales, and represents an attractive target for mining to produce oxygen and hydrogen for propellant, and water and oxygen for human life support. However, the mere presence of ice at the poles does not provide much information: Where is it exactly? How much is there? Is it thick layers of pure ice, or small amounts mixed in the soil? How hard is it to excavate? This white paper attempts to offer answers to these questions based on interpretations of the best data currently available. New prospecting missions in the future–particularly landers and Figure 1. Ice accumulation mechanisms. rovers–will continue to change and improve our understanding of ice on the Moon. This guide will be updated on an ongoing expected to be old. (2) Solar wind. The solar wind is a stream of basis to incorporate new findings. electrons, protons and other particles that are constantly colliding with the unprotected surface of the Moon. This Why is there ice on the Moon? process can create individual OH and H2O molecules that are Two factors create conditions that allow ice to accumulate able to ballistically hop across the surface, eventually migrating and persist at the lunar poles: (1) the Moon has a very small axial to the PSRs. -

Rare Astronomical Sights and Sounds
Jonathan Powell Rare Astronomical Sights and Sounds The Patrick Moore The Patrick Moore Practical Astronomy Series More information about this series at http://www.springer.com/series/3192 Rare Astronomical Sights and Sounds Jonathan Powell Jonathan Powell Ebbw Vale, United Kingdom ISSN 1431-9756 ISSN 2197-6562 (electronic) The Patrick Moore Practical Astronomy Series ISBN 978-3-319-97700-3 ISBN 978-3-319-97701-0 (eBook) https://doi.org/10.1007/978-3-319-97701-0 Library of Congress Control Number: 2018953700 © Springer Nature Switzerland AG 2018 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. The use of general descriptive names, registered names, trademarks, service marks, etc. in this publication does not imply, even in the absence of a specific statement, that such names are exempt from the relevant protective laws and regulations and therefore free for general use. The publisher, the authors, and the editors are safe to assume that the advice and information in this book are believed to be true and accurate at the date of publication. Neither the publisher nor the authors or the editors give a warranty, express or implied, with respect to the material contained herein or for any errors or omissions that may have been made. -

Global Exploration Roadmap
The Global Exploration Roadmap January 2018 What is New in The Global Exploration Roadmap? This new edition of the Global Exploration robotic space exploration. Refinements in important role in sustainable human space Roadmap reaffirms the interest of 14 space this edition include: exploration. Initially, it supports human and agencies to expand human presence into the robotic lunar exploration in a manner which Solar System, with the surface of Mars as • A summary of the benefits stemming from creates opportunities for multiple sectors to a common driving goal. It reflects a coordi- space exploration. Numerous benefits will advance key goals. nated international effort to prepare for space come from this exciting endeavour. It is • The recognition of the growing private exploration missions beginning with the Inter- important that mission objectives reflect this sector interest in space exploration. national Space Station (ISS) and continuing priority when planning exploration missions. Interest from the private sector is already to the lunar vicinity, the lunar surface, then • The important role of science and knowl- transforming the future of low Earth orbit, on to Mars. The expanded group of agencies edge gain. Open interaction with the creating new opportunities as space agen- demonstrates the growing interest in space international science community helped cies look to expand human presence into exploration and the importance of coopera- identify specific scientific opportunities the Solar System. Growing capability and tion to realise individual and common goals created by the presence of humans and interest from the private sector indicate and objectives. their infrastructure as they explore the Solar a future for collaboration not only among System. -

Traverse Planning for Human and Robotic Missions to Hadley Rille
NASA/TM-2008-215367 Traverse Planning for Human and Robotic Missions to Hadley Rille Michael Broxton, Matthew C. Deans, Terrence Fong, Trey Smith, NASA Ames Research Center Mark Helper, University of Texas / Austin Kip V. Hodges, Arizona State University, Gerald G. Schaber, USGS (retired) Harrison H. Schmitt IHMC National Aeronautics and Space Administration Ames Research Center Moffett Field, California, 94035-1000 January 2009 NASA/TM-2008-215367 Traverse Planning for Human and Robotic Missions to Hadley Rille Michael Broxton, Matthew C. Deans, Terrence Fong, Trey Smith, NASA Ames Research Center Mark Helper, University of Texas / Austin Kip V. Hodges, Arizona State University, Gerald G. Schaber, USGS (retired) Harrison H. Schmitt IHMC National Aeronautics and Space Administration Ames Research Center Moffett Field, California, 94035-1000 January 2009 Traverse Planning for Human and Robotic Missions to Hadley Rille (report) Michael Broxton1, Matthew C. Deans1, Terrence Fong1, Mark Helper2, Kip V. Hodges3, Gerald G. Schaber4, Harrison H. Schmitt5, and Trey Smith1 1NASA Ames Research Center, 2University of Texas / Austin, 3Arizona State University, 4USGS (retired), 5IHMC Summary On November 6, 2008, we conducted a short lunar traverse planning exercise at the NASA Ames Research Center. The objective was to establish an initial EVA traverse plan for a hypothetical, manned mission to the Apollo 15 region and then to identify where ground-level data (e.g., collected by robotic recon) would help refine the plan. The planning for this mission, which we named “Apollo 15B”, focused on Hadley Rille near Hadley C, and the ejecta blanket from Hadley C that is deposited on to Hadley Rille. -

The Soviet Space Program
C05500088 TOP eEGRET iuf 3EEA~ NIE 11-1-71 THE SOVIET SPACE PROGRAM Declassified Under Authority of the lnteragency Security Classification Appeals Panel, E.O. 13526, sec. 5.3(b)(3) ISCAP Appeal No. 2011 -003, document 2 Declassification date: November 23, 2020 ifOP GEEAE:r C05500088 1'9P SloGRET CONTENTS Page THE PROBLEM ... 1 SUMMARY OF KEY JUDGMENTS l DISCUSSION 5 I. SOV.IET SPACE ACTIVITY DURING TfIE PAST TWO YEARS . 5 II. POLITICAL AND ECONOMIC FACTORS AFFECTING FUTURE PROSPECTS . 6 A. General ............................................. 6 B. Organization and Management . ............... 6 C. Economics .. .. .. .. .. .. .. .. .. .. .. ...... .. 8 III. SCIENTIFIC AND TECHNICAL FACTORS ... 9 A. General .. .. .. .. .. 9 B. Launch Vehicles . 9 C. High-Energy Propellants .. .. .. .. .. .. .. .. .. 11 D. Manned Spacecraft . 12 E. Life Support Systems . .. .. .. .. .. .. .. .. 15 F. Non-Nuclear Power Sources for Spacecraft . 16 G. Nuclear Power and Propulsion ..... 16 Te>P M:EW TCS 2032-71 IOP SECl<ET" C05500088 TOP SECRGJ:. IOP SECREI Page H. Communications Systems for Space Operations . 16 I. Command and Control for Space Operations . 17 IV. FUTURE PROSPECTS ....................................... 18 A. General ............... ... ···•· ................. ····· ... 18 B. Manned Space Station . 19 C. Planetary Exploration . ........ 19 D. Unmanned Lunar Exploration ..... 21 E. Manned Lunar Landfog ... 21 F. Applied Satellites ......... 22 G. Scientific Satellites ........................................ 24 V. INTERNATIONAL SPACE COOPERATION ............. 24 A. USSR-European Nations .................................... 24 B. USSR-United States 25 ANNEX A. SOVIET SPACE ACTIVITY ANNEX B. SOVIET SPACE LAUNCH VEHICLES ANNEX C. SOVIET CHRONOLOGICAL SPACE LOG FOR THE PERIOD 24 June 1969 Through 27 June 1971 TCS 2032-71 IOP SLClt~ 70P SECRE1- C05500088 TOP SEGR:R THE SOVIET SPACE PROGRAM THE PROBLEM To estimate Soviet capabilities and probable accomplishments in space over the next 5 to 10 years.' SUMMARY OF KEY JUDGMENTS A. -

Apollo Over the Moon: a View from Orbit (Nasa Sp-362)
chl APOLLO OVER THE MOON: A VIEW FROM ORBIT (NASA SP-362) Chapter 1 - Introduction Harold Masursky, Farouk El-Baz, Frederick J. Doyle, and Leon J. Kosofsky [For a high resolution picture- click here] Objectives [1] Photography of the lunar surface was considered an important goal of the Apollo program by the National Aeronautics and Space Administration. The important objectives of Apollo photography were (1) to gather data pertaining to the topography and specific landmarks along the approach paths to the early Apollo landing sites; (2) to obtain high-resolution photographs of the landing sites and surrounding areas to plan lunar surface exploration, and to provide a basis for extrapolating the concentrated observations at the landing sites to nearby areas; and (3) to obtain photographs suitable for regional studies of the lunar geologic environment and the processes that act upon it. Through study of the photographs and all other arrays of information gathered by the Apollo and earlier lunar programs, we may develop an understanding of the evolution of the lunar crust. In this introductory chapter we describe how the Apollo photographic systems were selected and used; how the photographic mission plans were formulated and conducted; how part of the great mass of data is being analyzed and published; and, finally, we describe some of the scientific results. Historically most lunar atlases have used photointerpretive techniques to discuss the possible origins of the Moon's crust and its surface features. The ideas presented in this volume also rely on photointerpretation. However, many ideas are substantiated or expanded by information obtained from the huge arrays of supporting data gathered by Earth-based and orbital sensors, from experiments deployed on the lunar surface, and from studies made of the returned samples.