ON the DESIGN, SYNTHESIS, and RADIATION EFFECT PREVENTION of a 6U DEEP SPACE CUBESAT by Michael Cullen Halvorson a Thesis Submi
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

New Moon Explorer Mission Concept
New Moon Explorer Mission Concept Les JOHNSONa,*, John CARRa,Jared Jared DERVANa, Alexander FEWa, Andy HEATONa, Benjamin Malphrusd, Leslie MCNUTTa, Joe NUTHb, Dana Tursec, and Aaron Zuchermand aNASA MSFC, Huntsville, AL USA bNASA GSFC, Huntsville, AL USA cRoccor, Longmont, CO USA dMorehead State University, Morehead, KY USA Abstract New Moon Explorer (NME) is a smallsat reconnaissance mission concept to explore Earth’s ‘New Moon’, the recently discovered Earth orbital companion asteroid 469219 Kamoʻoalewa (formerly 2016HO3), using solar sail propulsion. NME would determine Kamoʻoalewa’s spin rate, pole position, shape, structure, mass, density, chemical composition, temperature, thermal inertia, regolith characteristics, and spectral type using onboard instrumentation. If flown, NME would demonstrate multiple enabling technologies, including solar sail propulsion, large-area thin film power generation, and small spacecraft technology tailored for interplanetary space missions. Leveraging the solar sail technology and mission expertise developed by NASA for the Near Earth Asteroid (NEA) Scout mission, affordably learning more about our newest near neighbor is now a possibility. The mission is not yet planned for flight. Keywords: Kamoʻoalewa, solar sail, moon, Apollo asteroid 1. Introduction The emerging capabilities of extremely small spacecraft, coupled with solar sail propulsion, offers an opportunity for low-cost reconnaissance of the recently- discovered asteroid 469219 Kamoʻoalewa (formerly 2016HO3). While Kamoʻoalewa is not strictly a new moon, it is, for all practical purposes, an orbital companion of the Earth as the planet circles the sun. Kamoʻoalewa’s orbit relative to the Earth can be seen in Figure 1. Using the technologies developed for the NASA Fig. 1 The orbit of Earth’s companion, Kamoʻoalewa Near Earth Asteroid (NEA) Scout mission, a 6U as both it and the Earth orbit the Sun. -

Copyrighted Material
Index Abulfeda crater chain (Moon), 97 Aphrodite Terra (Venus), 142, 143, 144, 145, 146 Acheron Fossae (Mars), 165 Apohele asteroids, 353–354 Achilles asteroids, 351 Apollinaris Patera (Mars), 168 achondrite meteorites, 360 Apollo asteroids, 346, 353, 354, 361, 371 Acidalia Planitia (Mars), 164 Apollo program, 86, 96, 97, 101, 102, 108–109, 110, 361 Adams, John Couch, 298 Apollo 8, 96 Adonis, 371 Apollo 11, 94, 110 Adrastea, 238, 241 Apollo 12, 96, 110 Aegaeon, 263 Apollo 14, 93, 110 Africa, 63, 73, 143 Apollo 15, 100, 103, 104, 110 Akatsuki spacecraft (see Venus Climate Orbiter) Apollo 16, 59, 96, 102, 103, 110 Akna Montes (Venus), 142 Apollo 17, 95, 99, 100, 102, 103, 110 Alabama, 62 Apollodorus crater (Mercury), 127 Alba Patera (Mars), 167 Apollo Lunar Surface Experiments Package (ALSEP), 110 Aldrin, Edwin (Buzz), 94 Apophis, 354, 355 Alexandria, 69 Appalachian mountains (Earth), 74, 270 Alfvén, Hannes, 35 Aqua, 56 Alfvén waves, 35–36, 43, 49 Arabia Terra (Mars), 177, 191, 200 Algeria, 358 arachnoids (see Venus) ALH 84001, 201, 204–205 Archimedes crater (Moon), 93, 106 Allan Hills, 109, 201 Arctic, 62, 67, 84, 186, 229 Allende meteorite, 359, 360 Arden Corona (Miranda), 291 Allen Telescope Array, 409 Arecibo Observatory, 114, 144, 341, 379, 380, 408, 409 Alpha Regio (Venus), 144, 148, 149 Ares Vallis (Mars), 179, 180, 199 Alphonsus crater (Moon), 99, 102 Argentina, 408 Alps (Moon), 93 Argyre Basin (Mars), 161, 162, 163, 166, 186 Amalthea, 236–237, 238, 239, 241 Ariadaeus Rille (Moon), 100, 102 Amazonis Planitia (Mars), 161 COPYRIGHTED -

The Cubesat Mission to Study Solar Particles (Cusp) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021)
The CubeSat Mission to Study Solar Particles (CuSP) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021) Acknowledgements – National Aeronautics and Space Administration (NASA) and CuSP Principal Investigator, Dr. Mihir Desai, Southwest Research Institute (SwRI) Feature Articles in SYSTEMS Magazine Three-part special series on Artemis I CubeSats - April 2019 (CuSP, IceCube, ArgoMoon, EQUULEUS/OMOTENASHI, & DSN) ▸ - September 2019 (CisLunar Explorers, OMOTENASHI & Iris Transponder) - March 2020 (BioSentinnel, Near-Earth Asteroid Scout, EQUULEUS, Lunar Flashlight, Lunar Polar Hydrogen Mapper, & Δ-Differential One-Way Range) Available in the AESS Resource Center https://resourcecenter.aess.ieee.org/ ▸Free for AESS members ▸ What are CubeSats? A class of small research spacecraft Built to standard dimensions (Units or “U”) ▸ - 1U = 10 cm x 10 cm x 11 cm (Roughly “cube-shaped”) ▸ - Modular: 1U, 2U, 3U, 6U or 12U in size - Weigh less than 1.33 kg per U NASA's CubeSats are dispensed from a deployer such as a Poly-Picosatellite Orbital Deployer (P-POD) ▸NASA’s CubeSat Launch initiative (CSLI) provides opportunities for small satellite payloads to fly on rockets ▸planned for upcoming launches. These CubeSats are flown as secondary payloads on previously planned missions. https://www.nasa.gov/directorates/heo/home/CubeSats_initiative What is CuSP? NASA Science Mission Directorate sponsored Heliospheric Science Mission selected in June 2015 to be launched on Artemis I. ▸ https://www.nasa.gov/feature/goddard/2016/heliophys ics-cubesat-to-launch-on-nasa-s-sls Support space weather research by determining proton radiation levels during solar energetic particle events and identifying suprathermal properties that could help ▸ predict geomagnetic storms. -

Chandrayaan-2 Completes a Year Around the Moon
One-year completion of Chandrayaan-2 Lunar orbit insertion (August 20, 2019) Chandrayaan-2 completes a year around the Moon The Moon provides the best linkage to understand Earth’s early history and offers an undisturbed record of the inner Solar system environment. It could also be a base for future human space exploration of the solar system and a unique laboratory, unlike any on Earth, for fundamental physics investigations. In spite of several missions to the Moon, there remains several unanswered questions. Continued high resolution studies of its surface, sub-surface/interior and its low-density exosphere, are essential to address diversities in lunar surface composition and to trace back the origin and evolution of the Moon. The clear evidence from India’s first mission to the Moon, Chandrayaan-1, on the extensive presence of surface water and the indication for sub- surface polar water-ice deposits, argues for more focused studies on the extent of water on the surface, below the surface and in the tenuous lunar exosphere, to address the true origin and availability of water on Moon. With the goal of expanding the lunar scientific knowledge through detailed studies of topography, mineralogy, surface chemical composition, thermo-physical characteristics and the lunar exosphere, Chandrayaan-2 was launched on 22nd July 2019 and inserted into the lunar orbit on 20th August 2019, exactly one year ago. Though the soft-landing attempt was not successful, the orbiter, which was equipped with eight scientific instruments, was successfully placed in the lunar orbit. The orbiter completed more than 4400 orbits around the Moon and all the instruments are currently performing well. -
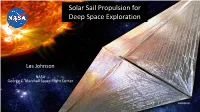
Solar Sail Propulsion for Deep Space Exploration
Solar Sail Propulsion for Deep Space Exploration Les Johnson NASA George C. Marshall Space Flight Center NASA Image We tend to think of space as being big and empty… NASA Image Space Is NOT Empty. We can use the environments of space to our advantage NASA Image Solar Sails Derive Propulsion By Reflecting Photons Solar sails use photon “pressure” or force on thin, lightweight, reflective sheets to produce thrust. 4 NASA Image Real Solar Sails Are Not “Ideal” Billowed Quadrant Diffuse Reflection 4 Thrust Vector Components 4 Solar Sail Trajectory Control Solar Radiation Pressure allows inward or outward Spiral Original orbit Sail Force Force Sail Shrinking orbit Expanding orbit Solar Sails Experience VERY Small Forces NASA Image 8 Solar Sail Missions Flown Image courtesy of Univ. Surrey NASA Image Image courtesy of JAXA Image courtesy of The Planetary Society NanoSail-D (2010) IKAROS (2010) LightSail-1 & 2 CanX-7 (2016) InflateSail (2017) NASA JAXA (2015/2019) Canada EU/Univ. of Surrey The Planetary Society Earth Orbit Interplanetary Earth Orbit Earth Orbit Deployment Only Full Flight Earth Orbit Deployment Only Deployment Only Deployment / Flight 3U CubeSat 315 kg Smallsat 3U CubeSat 3U CubeSat 10 m2 196 m2 3U CubeSat <10 m2 10 m2 32 m2 9 Planned Solar Sail Missions NASA Image NASA Image NASA Image Near Earth Asteroid Scout Advanced Composite Solar Solar Cruiser (2025) NASA (2021) NASA Sail System (TBD) NASA Interplanetary Interplanetary Earth Orbit Full Flight Full Flight Full Flight 100 kg spacecraft 6U CubeSat 12U CubeSat 1653 m2 86 -

The Uncanny in Howard Hawks's the Big Sleep
The uncanny in Howard Hawks’s The Big Sleep Christophe Gelly To cite this version: Christophe Gelly. The uncanny in Howard Hawks’s The Big Sleep. 2006. halshs-00494257 HAL Id: halshs-00494257 https://halshs.archives-ouvertes.fr/halshs-00494257 Preprint submitted on 22 Jun 2010 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. The uncanny in Howard Hawks’s The Big Sleep Christophe GELLY Dealing with The Big Sleep as a work fraught with uncanny representations now seems self-evident, after so many critics—whether in the field of literary or film studies— unsuccessfully strove to recapture the true development of the criminal plot unravelled by Marlowe: one piece still insists on being missing and points to the unsatisfactory closure of the text as well as the movie. It may be the mystery around Owen Taylor’s death, a minor character (but are there really minor characters in the detective genre, before the final solution supposedly sets up the characters’ roles for good?), or the main criminal protagonist in the movie, Eddie Mars, whose guilt is problematic in the plot. In other words, the disturbing, uncanny quality in the novel and the movie stems from this problematic closure and from the mystery on who did what precisely in the story—hence this quality derives from a debunking of the genre as self-contained and purely self-explanatory, an “ideal” of the text by which the text fails to abide. -
General Vertical Files Anderson Reading Room Center for Southwest Research Zimmerman Library
“A” – biographical Abiquiu, NM GUIDE TO THE GENERAL VERTICAL FILES ANDERSON READING ROOM CENTER FOR SOUTHWEST RESEARCH ZIMMERMAN LIBRARY (See UNM Archives Vertical Files http://rmoa.unm.edu/docviewer.php?docId=nmuunmverticalfiles.xml) FOLDER HEADINGS “A” – biographical Alpha folders contain clippings about various misc. individuals, artists, writers, etc, whose names begin with “A.” Alpha folders exist for most letters of the alphabet. Abbey, Edward – author Abeita, Jim – artist – Navajo Abell, Bertha M. – first Anglo born near Albuquerque Abeyta / Abeita – biographical information of people with this surname Abeyta, Tony – painter - Navajo Abiquiu, NM – General – Catholic – Christ in the Desert Monastery – Dam and Reservoir Abo Pass - history. See also Salinas National Monument Abousleman – biographical information of people with this surname Afghanistan War – NM – See also Iraq War Abousleman – biographical information of people with this surname Abrams, Jonathan – art collector Abreu, Margaret Silva – author: Hispanic, folklore, foods Abruzzo, Ben – balloonist. See also Ballooning, Albuquerque Balloon Fiesta Acequias – ditches (canoas, ground wáter, surface wáter, puming, water rights (See also Land Grants; Rio Grande Valley; Water; and Santa Fe - Acequia Madre) Acequias – Albuquerque, map 2005-2006 – ditch system in city Acequias – Colorado (San Luis) Ackerman, Mae N. – Masonic leader Acoma Pueblo - Sky City. See also Indian gaming. See also Pueblos – General; and Onate, Juan de Acuff, Mark – newspaper editor – NM Independent and -

Glossary Glossary
Glossary Glossary Albedo A measure of an object’s reflectivity. A pure white reflecting surface has an albedo of 1.0 (100%). A pitch-black, nonreflecting surface has an albedo of 0.0. The Moon is a fairly dark object with a combined albedo of 0.07 (reflecting 7% of the sunlight that falls upon it). The albedo range of the lunar maria is between 0.05 and 0.08. The brighter highlands have an albedo range from 0.09 to 0.15. Anorthosite Rocks rich in the mineral feldspar, making up much of the Moon’s bright highland regions. Aperture The diameter of a telescope’s objective lens or primary mirror. Apogee The point in the Moon’s orbit where it is furthest from the Earth. At apogee, the Moon can reach a maximum distance of 406,700 km from the Earth. Apollo The manned lunar program of the United States. Between July 1969 and December 1972, six Apollo missions landed on the Moon, allowing a total of 12 astronauts to explore its surface. Asteroid A minor planet. A large solid body of rock in orbit around the Sun. Banded crater A crater that displays dusky linear tracts on its inner walls and/or floor. 250 Basalt A dark, fine-grained volcanic rock, low in silicon, with a low viscosity. Basaltic material fills many of the Moon’s major basins, especially on the near side. Glossary Basin A very large circular impact structure (usually comprising multiple concentric rings) that usually displays some degree of flooding with lava. The largest and most conspicuous lava- flooded basins on the Moon are found on the near side, and most are filled to their outer edges with mare basalts. -
2021 Transpacific Yacht Race Event Program
TRANSPACTHE FIFTY-FIRST RACE FROM LOS ANGELES 2021 TO HONOLULU 2 0 21 JULY 13-30, 2021 Comanche: © Sharon Green / Ultimate Sailing COMANCHE Taxi Dancer: © Ronnie Simpson / Ultimate Sailing • Hamachi: © Team Hamachi HAMACHI 2019 FIRST TO FINISH Official race guide - $5.00 2019 OVERALL CORRECTED TIME WINNER P: 808.845.6465 [email protected] F: 808.841.6610 OFFICIAL HANDBOOK OF THE 51ST TRANSPACIFIC YACHT RACE The Transpac 2021 Official Race Handbook is published for the Honolulu Committee of the Transpacific Yacht Club by Roth Communications, 2040 Alewa Drive, Honolulu, HI 96817 USA (808) 595-4124 [email protected] Publisher .............................................Michael J. Roth Roth Communications Editor .............................................. Ray Pendleton, Kim Ickler Contributing Writers .................... Dobbs Davis, Stan Honey, Ray Pendleton Contributing Photographers ...... Sharon Green/ultimatesailingcom, Ronnie Simpson/ultimatesailing.com, Todd Rasmussen, Betsy Crowfoot Senescu/ultimatesailing.com, Walter Cooper/ ultimatesailing.com, Lauren Easley - Leialoha Creative, Joyce Riley, Geri Conser, Emma Deardorff, Rachel Rosales, Phil Uhl, David Livingston, Pam Davis, Brian Farr Designer ........................................ Leslie Johnson Design On the Cover: CONTENTS Taxi Dancer R/P 70 Yabsley/Compton 2019 1st Div. 2 Sleds ET: 8:06:43:22 CT: 08:23:09:26 Schedule of Events . 3 Photo: Ronnie Simpson / ultimatesailing.com Welcome from the Governor of Hawaii . 8 Inset left: Welcome from the Mayor of Honolulu . 9 Comanche Verdier/VPLP 100 Jim Cooney & Samantha Grant Welcome from the Mayor of Long Beach . 9 2019 Barndoor Winner - First to Finish Overall: ET: 5:11:14:05 Welcome from the Transpacific Yacht Club Commodore . 10 Photo: Sharon Green / ultimatesailingcom Welcome from the Honolulu Committee Chair . 10 Inset right: Welcome from the Sponsoring Yacht Clubs . -

Transmittal of Geotail Prelaunch Mission Operation Report
National Aeronautics and Space Administration Washington, D.C. 20546 ss Reply to Attn of: TO: DISTRIBUTION FROM: S/Associate Administrator for Space Science and Applications SUBJECT: Transmittal of Geotail Prelaunch Mission Operation Report I am pleased to forward with this memorandum the Prelaunch Mission Operation Report for Geotail, a joint project of the Institute of Space and Astronautical Science (ISAS) of Japan and NASA to investigate the geomagnetic tail region of the magnetosphere. The satellite was designed and developed by ISAS and will carry two ISAS, two NASA, and three joint ISAS/NASA instruments. The launch, on a Delta II expendable launch vehicle (ELV), will take place no earlier than July 14, 1992, from Cape Canaveral Air Force Station. This launch is the first under NASA’s Medium ELV launch service contract with the McDonnell Douglas Corporation. Geotail is an element in the International Solar Terrestrial Physics (ISTP) Program. The overall goal of the ISTP Program is to employ simultaneous and closely coordinated remote observations of the sun and in situ observations both in the undisturbed heliosphere near Earth and in Earth’s magnetosphere to measure, model, and quantitatively assess the processes in the sun/Earth interaction chain. In the early phase of the Program, simultaneous measurements in the key regions of geospace from Geotail and the two U.S. satellites of the Global Geospace Science (GGS) Program, Wind and Polar, along with equatorial measurements, will be used to characterize global energy transfer. The current schedule includes, in addition to the July launch of Geotail, launches of Wind in August 1993 and Polar in May 1994. -

Sky and Telescope
SkyandTelescope.com The Lunar 100 By Charles A. Wood Just about every telescope user is familiar with French comet hunter Charles Messier's catalog of fuzzy objects. Messier's 18th-century listing of 109 galaxies, clusters, and nebulae contains some of the largest, brightest, and most visually interesting deep-sky treasures visible from the Northern Hemisphere. Little wonder that observing all the M objects is regarded as a virtual rite of passage for amateur astronomers. But the night sky offers an object that is larger, brighter, and more visually captivating than anything on Messier's list: the Moon. Yet many backyard astronomers never go beyond the astro-tourist stage to acquire the knowledge and understanding necessary to really appreciate what they're looking at, and how magnificent and amazing it truly is. Perhaps this is because after they identify a few of the Moon's most conspicuous features, many amateurs don't know where Many Lunar 100 selections are plainly visible in this image of the full Moon, while others require to look next. a more detailed view, different illumination, or favorable libration. North is up. S&T: Gary The Lunar 100 list is an attempt to provide Moon lovers with Seronik something akin to what deep-sky observers enjoy with the Messier catalog: a selection of telescopic sights to ignite interest and enhance understanding. Presented here is a selection of the Moon's 100 most interesting regions, craters, basins, mountains, rilles, and domes. I challenge observers to find and observe them all and, more important, to consider what each feature tells us about lunar and Earth history. -

Aas 21-290 Cislunar Space Situational Awareness
AAS 21-290 CISLUNAR SPACE SITUATIONAL AWARENESS Carolin Frueh*, Kathleen Howell†, Kyle J. DeMars‡, Surabhi Bhadauria§ Classically, space situational awareness (SSA) and space traffic management (STM) focus on the near-Earth region, which is highly populated by satellites and space debris objects. With the expansion of space activities further in the cislunar space, the problems of SSA and STM arise anew in regions far away from the near-Earth realm. This paper investigates the conditions for successful Space Situational Awareness and Space Traffic Management in the cislunar region by drawing a direct comparison to the known challenges and solutions in the near-Earth realm, highlighting similarities and differences and their implications on Space Traffic Management engineering solutions. INTRODUCTION Space Situational Awareness (SSA), sometimes called Space Domain Awareness (SDA), can be understood as summary terms for the comprehensive knowledge on all objects in a specific region without necessarily having direct communication to those objects. Space Traffic Management (STM), as an extrapolatory term, is applying the SSA knowledge to manage this said region to enable sustainable use. All three of those terms have traditionally been applied to the realm of the near-Earth space, usually expanding from low Earth orbit (LEO) to hyper geostationary orbit (hyper-GEO), and the objects of interest are objects in orbital motion for which the dominant astrodynamical term is the central gravitational potential of the Earth. Space Traffic Management (STM) aims at engineering solutions, methods, and protocols that allow regulating space fairing in a manner enabling the sustainable use of space. SSA and SDA thereby provide the knowledge-base for STM, and the areas are heavily intertwined.