INF2270 — Spring 2011
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

How Data Hazards Can Be Removed Effectively
International Journal of Scientific & Engineering Research, Volume 7, Issue 9, September-2016 116 ISSN 2229-5518 How Data Hazards can be removed effectively Muhammad Zeeshan, Saadia Anayat, Rabia and Nabila Rehman Abstract—For fast Processing of instructions in computer architecture, the most frequently used technique is Pipelining technique, the Pipelining is consider an important implementation technique used in computer hardware for multi-processing of instructions. Although multiple instructions can be executed at the same time with the help of pipelining, but sometimes multi-processing create a critical situation that altered the normal CPU executions in expected way, sometime it may cause processing delay and produce incorrect computational results than expected. This situation is known as hazard. Pipelining processing increase the processing speed of the CPU but these Hazards that accrue due to multi-processing may sometime decrease the CPU processing. Hazards can be needed to handle properly at the beginning otherwise it causes serious damage to pipelining processing or overall performance of computation can be effected. Data hazard is one from three types of pipeline hazards. It may result in Race condition if we ignore a data hazard, so it is essential to resolve data hazards properly. In this paper, we tries to present some ideas to deal with data hazards are presented i.e. introduce idea how data hazards are harmful for processing and what is the cause of data hazards, why data hazard accord, how we remove data hazards effectively. While pipelining is very useful but there are several complications and serious issue that may occurred related to pipelining i.e. -

Computer Organization and Architecture Designing for Performance Ninth Edition
COMPUTER ORGANIZATION AND ARCHITECTURE DESIGNING FOR PERFORMANCE NINTH EDITION William Stallings Boston Columbus Indianapolis New York San Francisco Upper Saddle River Amsterdam Cape Town Dubai London Madrid Milan Munich Paris Montréal Toronto Delhi Mexico City São Paulo Sydney Hong Kong Seoul Singapore Taipei Tokyo Editorial Director: Marcia Horton Designer: Bruce Kenselaar Executive Editor: Tracy Dunkelberger Manager, Visual Research: Karen Sanatar Associate Editor: Carole Snyder Manager, Rights and Permissions: Mike Joyce Director of Marketing: Patrice Jones Text Permission Coordinator: Jen Roach Marketing Manager: Yez Alayan Cover Art: Charles Bowman/Robert Harding Marketing Coordinator: Kathryn Ferranti Lead Media Project Manager: Daniel Sandin Marketing Assistant: Emma Snider Full-Service Project Management: Shiny Rajesh/ Director of Production: Vince O’Brien Integra Software Services Pvt. Ltd. Managing Editor: Jeff Holcomb Composition: Integra Software Services Pvt. Ltd. Production Project Manager: Kayla Smith-Tarbox Printer/Binder: Edward Brothers Production Editor: Pat Brown Cover Printer: Lehigh-Phoenix Color/Hagerstown Manufacturing Buyer: Pat Brown Text Font: Times Ten-Roman Creative Director: Jayne Conte Credits: Figure 2.14: reprinted with permission from The Computer Language Company, Inc. Figure 17.10: Buyya, Rajkumar, High-Performance Cluster Computing: Architectures and Systems, Vol I, 1st edition, ©1999. Reprinted and Electronically reproduced by permission of Pearson Education, Inc. Upper Saddle River, New Jersey, Figure 17.11: Reprinted with permission from Ethernet Alliance. Credits and acknowledgments borrowed from other sources and reproduced, with permission, in this textbook appear on the appropriate page within text. Copyright © 2013, 2010, 2006 by Pearson Education, Inc., publishing as Prentice Hall. All rights reserved. Manufactured in the United States of America. -
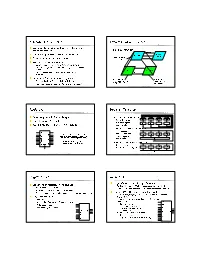
Flynn's Taxonomy
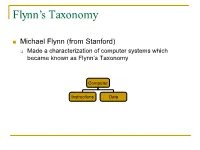
Flynn’s Taxonomy n Michael Flynn (from Stanford) q Made a characterization of computer systems which became known as Flynn’s Taxonomy Computer Instructions Data SISD – Single Instruction Single Data Systems SI SISD SD SIMD – Single Instruction Multiple Data Systems “Vector Processors” SIMD SD SI SIMD SD Multiple Data SIMD SD MIMD Multiple Instructions Multiple Data Systems “Multi Processors” Multiple Instructions Multiple Data SI SIMD SD SI SIMD SD SI SIMD SD MISD – Multiple Instructions / Single Data Systems n Some people say “pipelining” lies here, but this is debatable Single Data Multiple Instructions SIMD SI SD SIMD SI SIMD SI Abbreviations •PC – Program Counter •MAR – Memory Access Register •M – Memory •MDR – Memory Data Register •A – Accumulator •ALU – Arithmetic Logic Unit •IR – Instruction Register •OP – Opcode •ADDR – Address •CLU – Control Logic Unit LOAD X n MAR <- PC n MDR <- M[ MAR ] n IR <- MDR n MAR <- IR[ ADDR ] n DECODER <- IR[ OP ] n MDR <- M[ MAR ] n A <- MDR ADD n MAR <- PC n MDR <- M[ MAR ] n IR <- MDR n MAR <- IR[ ADDR ] n DECODER <- IR[ OP ] n MDR <- M[ MAR ] n A <- A+MDR STORE n MDR <- A n M[ MAR ] <- MDR SISD Stack Machine •Stack Trace •Push 1 1 _ •Push 2 2 1 •Add 2 3 •Pop _ 3 •Pop C _ _ •First Stack Machine •B5000 Array Processor Array Processors n One of the first Array Processors was the ILLIIAC IV n Load A1, V[1] n Load B1, Y[1] n Load A2, V[2] n Load B2, Y[2] n Load A3, V[3] n Load B3, Y[3] n ADDALL n Store C1, W[1] n Store C2, W[2] n Store C3, W[3] Memory Interleaving Definition: Memory interleaving is a design used to gain faster access to memory, by organizing memory into separate memories, each with their own MAR (memory address register). -

Computer Organization & Architecture Eie
COMPUTER ORGANIZATION & ARCHITECTURE EIE 411 Course Lecturer: Engr Banji Adedayo. Reg COREN. The characteristics of different computers vary considerably from category to category. Computers for data processing activities have different features than those with scientific features. Even computers configured within the same application area have variations in design. Computer architecture is the science of integrating those components to achieve a level of functionality and performance. It is logical organization or designs of the hardware that make up the computer system. The internal organization of a digital system is defined by the sequence of micro operations it performs on the data stored in its registers. The internal structure of a MICRO-PROCESSOR is called its architecture and includes the number lay out and functionality of registers, memory cell, decoders, controllers and clocks. HISTORY OF COMPUTER HARDWARE The first use of the word ‘Computer’ was recorded in 1613, referring to a person who carried out calculation or computation. A brief History: Computer as we all know 2day had its beginning with 19th century English Mathematics Professor named Chales Babage. He designed the analytical engine and it was this design that the basic frame work of the computer of today are based on. 1st Generation 1937-1946 The first electronic digital computer was built by Dr John V. Atanasoff & Berry Cliford (ABC). In 1943 an electronic computer named colossus was built for military. 1946 – The first general purpose digital computer- the Electronic Numerical Integrator and computer (ENIAC) was built. This computer weighed 30 tons and had 18,000 vacuum tubes which were used for processing. -
Please Replace the Following Pages in the Book. 26 Microcontroller Theory and Applications with the PIC18F
Please replace the following pages in the book. 26 Microcontroller Theory and Applications with the PIC18F Before Push After Push Stack Stack 16-bit Register 0120 143E 20C2 16-bit Register 0120 SP 20CA SP 20C8 143E 20C2 0703 20C4 0703 20C4 F601 20C6 F601 20C6 0706 20C8 0706 20C8 0120 20CA 20CA 20CC 20CC 20CE 20CE Bottom of Stack FIGURE 2.12 PUSH operation when accessing a stack from the bottom Before POP After POP Stack 16-bit Register A286 16-bit Register 0360 Stack 143E 20C2 SP 20C8 SP 20CA 143E 20C2 0705 20C4 0705 20C4 F208 20C6 F208 20C6 0107 20C8 0107 20C8 A286 20CA A286 20CA 20CC 20CC Bottom of Stack FIGURE 2.13 POP operation when accessing a stack from the bottom Note that the stack is a LIFO (last in, first out) memory. As mentioned earlier, a stack is typically used during subroutine CALLs. The CPU automatically PUSHes the return address onto a stack after executing a subroutine CALL instruction in the main program. After executing a RETURN from a subroutine instruction (placed by the programmer as the last instruction of the subroutine), the CPU automatically POPs the return address from the stack (previously PUSHed) and then returns control to the main program. Note that the PIC18F accesses the stack from the top. This means that the stack pointer in the PIC18F holds the address of the bottom of the stack. Hence, in the PIC18F, the stack pointer is incremented after a PUSH, and decremented after a POP. 2.3.2 Control Unit The main purpose of the control unit is to read and decode instructions from the program memory. -

Pipeline and Vector Processing
Computer Organization and Architecture Chapter 4 : Pipeline and Vector processing Chapter – 4 Pipeline and Vector Processing 4.1 Pipelining Pipelining is a technique of decomposing a sequential process into suboperations, with each subprocess being executed in a special dedicated segment that operates concurrently with all other segments. The overlapping of computation is made possible by associating a register with each segment in the pipeline. The registers provide isolation between each segment so that each can operate on distinct data simultaneously. Perhaps the simplest way of viewing the pipeline structure is to imagine that each segment consists of an input register followed by a combinational circuit. o The register holds the data. o The combinational circuit performs the suboperation in the particular segment. A clock is applied to all registers after enough time has elapsed to perform all segment activity. The pipeline organization will be demonstrated by means of a simple example. o To perform the combined multiply and add operations with a stream of numbers Ai * Bi + Ci for i = 1, 2, 3, …, 7 Each suboperation is to be implemented in a segment within a pipeline. R1 Ai, R2 Bi Input Ai and Bi R3 R1 * R2, R4 Ci Multiply and input Ci R5 R3 + R4 Add Ci to product Each segment has one or two registers and a combinational circuit as shown in Fig. 9-2. The five registers are loaded with new data every clock pulse. The effect of each clock is shown in Table 4-1. Compiled By: Er. Hari Aryal [[email protected]] Reference: W. Stallings | 1 Computer Organization and Architecture Chapter 4 : Pipeline and Vector processing Fig 4-1: Example of pipeline processing Table 4-1: Content of Registers in Pipeline Example General Considerations Any operation that can be decomposed into a sequence of suboperations of about the same complexity can be implemented by a pipeline processor. -

Register Are Used to Quickly Accept, Store, and Transfer Data And
Register are used to quickly accept, store, and transfer data and instructions that are being used immediately by the CPU, there are various types of Registers those are used for various purpose. Among of the some Mostly used Registers named as AC or Accumulator, Data Register or DR, the AR or Address Register, program counter (PC), Memory Data Register (MDR) ,Index register,Memory Buffer Register. These Registers are used for performing the various Operations. While we are working on the System then these Registers are used by the CPU for Performing the Operations. When We Gives Some Input to the System then the Input will be Stored into the Registers and When the System will gives us the Results after Processing then the Result will also be from the Registers. So that they are used by the CPU for Processing the Data which is given by the User. Registers Perform:- 1) Fetch: The Fetch Operation is used for taking the instructions those are given by the user and the Instructions those are stored into the Main Memory will be fetch by using Registers. 2) Decode: The Decode Operation is used for interpreting the Instructions means the Instructions are decoded means the CPU will find out which Operation is to be performed on the Instructions. 3) Execute: The Execute Operation is performed by the CPU. And Results those are produced by the CPU are then Stored into the Memory and after that they are displayed on the user Screen. Types of Registers are as Followings 1. MAR stand for Memory Address Register This register holds the memory addresses of data and instructions. -
Computer Organization
Chapter 12 Computer Organization Central Processing Unit (CPU) • Data section ‣ Receives data from and sends data to the main memory subsystem and I/O devices • Control section ‣ Issues the control signals to the data section and the other components of the computer system Figure 12.1 CPU Input Data Control Main Output device section section Memory device Bus Data flow Control CPU components • 16-bit memory address register (MAR) ‣ 8-bit MARA and 8-bit MARB • 8-bit memory data register (MDR) • 8-bit multiplexers ‣ AMux, CMux, MDRMux ‣ 0 on control line routes left input ‣ 1 on control line routes right input Control signals • Originate from the control section on the right (not shown in Figure 12.2) • Two kinds of control signals ‣ Clock signals end in “Ck” to load data into registers with a clock pulse ‣ Signals that do not end in “Ck” to set up the data flow before each clock pulse arrives 0 1 8 14 15 22 23 A IR T3 M1 0x00 0x01 2 3 9 10 16 17 24 25 LoadCk Figure 12.2 X T4 M2 0x02 0x03 4 5 11 18 19 26 27 5 C SP T1 T5 M3 0x04 0x08 5 6 7 12 13 20 21 28 29 B PC T2 T6 M4 0xFA 0xFC 5 30 31 A CPU registers M5 0xFE 0xFF CBus ABus BBus Bus MARB MARCk MARA MDRCk MDR MDRMux AMux AMux MDRMux CMux 4 ALU ALU CMux Cin Cout C CCk Mem V VCk ANDZ Addr ANDZ Z ZCk Zout 0 Data 0 0 0 N NCk MemWrite MemRead Figure 12.2 (Expanded) 0 1 8 14 15 22 23 A IR T3 M1 0x00 0x01 2 3 9 10 16 17 24 25 LoadCk X T4 M2 0x02 0x03 4 5 11 18 19 26 27 5 C SP T1 T5 M3 0x04 0x08 5 6 7 12 13 20 21 28 29 B PC T2 T6 M4 0xFA 0xFC 5 30 31 A CPU registers M5 0xFE 0xFF CBus ABus BBus -
Computer Organization and Architecture, Rajaram & Radhakrishan, PHI
CHAPTER I CONTENTS: 1.1 INTRODUCTION 1.2 STORED PROGRAM ORGANIZATION 1.3 INDIRECT ADDRESS 1.4 COMPUTER REGISTERS 1.5 COMMON BUS SYSTEM SUMMARY SELF ASSESSMENT OBJECTIVE: In this chapter we are concerned with basic architecture and the different operations related to explain the proper functioning of the computer. Also how we can specify the operations with the help of different instructions. CHAPTER II CONTENTS: 2.1 REGISTER TRANSFER LANGUAGE 2.2 REGISTER TRANSFER 2.3 BUS AND MEMORY TRANSFERS 2.4 ARITHMETIC MICRO OPERATIONS 2.5 LOGIC MICROOPERATIONS 2.6 SHIFT MICRO OPERATIONS SUMMARY SELF ASSESSMENT OBJECTIVE: Here the concept of digital hardware modules is discussed. Size and complexity of the system can be varied as per the requirement of today. The interconnection of various modules is explained in the text. The way by which data is transferred from one register to another is called micro operation. Different micro operations are explained in the chapter. CHAPTER III CONTENTS: 3.1 INTRODUCTION 3.2 TIMING AND CONTROL 3.3 INSTRUCTION CYCLE 3.4 MEMORY-REFERENCE INSTRUCTIONS 3.5 INPUT-OUTPUT AND INTERRUPT SUMMARY SELF ASSESSMENT OBJECTIVE: There are various instructions with the help of which we can transfer the data from one place to another and manipulate the data as per our requirement. In this chapter we have included all the instructions, how they are being identified by the computer, what are their formats and many more details regarding the instructions. CHAPTER IV CONTENTS: 4.1 INTRODUCTION 4.2 ADDRESS SEQUENCING 4.3 MICROPROGRAM EXAMPLE 4.4 DESIGN OF CONTROL UNIT SUMMARY SELF ASSESSMENT OBJECTIVE: Various examples of micro programs are discussed in this chapter. -
Computer Organization Structure of a Computer Registers Register
Computer Organization Structure of a Computer z Computer design as an application of digital logic design procedures z Block diagram view address z Computer = processing unit + memory system Processor read/write Memory System central processing data z Processing unit = control + datapath unit (CPU) z Control = finite state machine y Inputs = machine instruction, datapath conditions y Outputs = register transfer control signals, ALU operation control signals codes Control Data Path y Instruction interpretation = instruction fetch, decode, data conditions execute z Datapath = functional units + registers instruction unit execution unit y Functional units = ALU, multipliers, dividers, etc. instruction fetch and functional units interpretation FSM y Registers = program counter, shifters, storage registers and registers CS 150 - Spring 2001 - Computer Organization - 1 CS 150 - Spring 2001 - Computer Organization - 2 Registers Register Transfer z Selectively loaded EN or LD input z Point-to-point connection MUX MUX MUX MUX z Output enable OE input y Dedicated wires y Muxes on inputs of rs rt rd R4 z Multiple registers group 4 or 8 in parallel each register z Common input from multiplexer y Load enables LD OE for each register rs rt rd R4 D7 Q7 OE asserted causes FF state to be D6 Q6 connected to output pins; otherwise they y Control signals D5 Q5 are left unconnected (high impedance) MUX D4 Q4 for multiplexer D3 Q3 D2 Q2 LD asserted during a lo-to-hi clock D1 Q1 transition loads new data into FFs z Common bus with output enables D0 CLK -
Computer Architectures
Parallel (High-Performance) Computer Architectures Tarek El-Ghazawi Department of Electrical and Computer Engineering The George Washington University Tarek El-Ghazawi, Introduction to High-Performance Computing slide 1 Introduction to Parallel Computing Systems Outline Definitions and Conceptual Classifications » Parallel Processing, MPP’s, and Related Terms » Flynn’s Classification of Computer Architectures Operational Models for Parallel Computers Interconnection Networks MPP’s Performance Tarek El-Ghazawi, Introduction to High-Performance Computing slide 2 Definitions and Conceptual Classification What is Parallel Processing? - A form of data processing which emphasizes the exploration and exploitation of inherent parallelism in the underlying problem. Other related terms » Massively Parallel Processors » Heterogeneous Processing – In the1990s, heterogeneous workstations from different processor vendors – Now, accelerators such as GPUs, FPGAs, Intel’s Xeon Phi, … » Grid computing » Cloud Computing Tarek El-Ghazawi, Introduction to High-Performance Computing slide 3 Definitions and Conceptual Classification Why Massively Parallel Processors (MPPs)? » Increase processing speed and memory allowing studies of problems with higher resolutions or bigger sizes » Provide a low cost alternative to using expensive processor and memory technologies (as in traditional vector machines) Tarek El-Ghazawi, Introduction to High-Performance Computing slide 4 Stored Program Computer The IAS machine was the first electronic computer developed, under -

UTP Cable Connectors
Computer Architecture Prof. Dr. Nizamettin AYDIN [email protected] MIPS ISA - I [email protected] http://www.yildiz.edu.tr/~naydin 1 2 Outline Computer Architecture • Overview of the MIPS architecture • can be viewed as – ISA vs Microarchitecture? – the machine language the CPU implements – CISC vs RISC • Instruction set architecture (ISA) – Basics of MIPS – Built in data types (integers, floating point numbers) – Components of the MIPS architecture – Fixed set of instructions – Fixed set of on-processor variables (registers) – Datapath and control unit – Interface for reading/writing memory – Memory – Mechanisms to do input/output – Memory addressing issue – how the ISA is implemented – Other components of the datapath • Microarchitecture – Control unit 3 4 Computer Architecture MIPS Architecture • Microarchitecture • MIPS – An acronym for Microprocessor without Interlocking Pipeline Stages – Not to be confused with a unit of computing speed equivalent to a Million Instructions Per Second • MIPS processor – born in the early 1980s from the work done by John Hennessy and his students at Stanford University • exploring the architectural concept of RISC – Originally used in Unix workstations, – now mainly used in small devices • Play Station, routers, printers, robots, cameras 5 6 Copyright 2000 N. AYDIN. All rights reserved. 1 MIPS Architecture CISC vs RISC • Designer MIPS Technologies, Imagination Technologies • Advantages of CISC Architecture: • Bits 64-bit (32 → 64) • Introduced 1985; – Microprogramming is easy to implement and much • Version MIPS32/64 Release 6 (2014) less expensive than hard wiring a control unit. • Design RISC – It is easy to add new commands into the chip without • Type Register-Register changing the structure of the instruction set as the • Encoding Fixed architecture uses general-purpose hardware to carry out • Branching Compare and branch commands.