Conversion of Geodetic Coordinates to the Local Tangent Plane
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Datum Transformations of GPS Positions Application Note
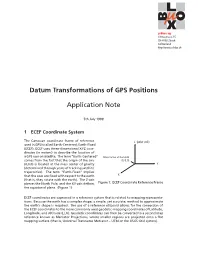
µ-blox ag Gloriastrasse 35 CH-8092 Zürich Switzerland http://www.u-blox.ch Datum Transformations of GPS Positions Application Note 5th July 1999 1 ECEF Coordinate System The Cartesian coordinate frame of reference used in GPS is called Earth-Centered, Earth-Fixed (ECEF). ECEF uses three-dimensional XYZ coor- dinates (in meters) to describe the location of a GPS user or satellite. The term "Earth-Centered" comes from the fact that the origin of the axis (0,0,0) is located at the mass center of gravity (determined through years of tracking satellite trajectories). The term "Earth-Fixed" implies that the axes are fixed with respect to the earth (that is, they rotate with the earth). The Z-axis pierces the North Pole, and the XY-axis defines Figure 1: ECEF Coordinate Reference Frame the equatorial plane. (Figure 1) ECEF coordinates are expressed in a reference system that is related to mapping representa- tions. Because the earth has a complex shape, a simple, yet accurate, method to approximate the earth’s shape is required. The use of a reference ellipsoid allows for the conversion of the ECEF coordinates to the more commonly used geodetic-mapping coordinates of Latitude, Longitude, and Altitude (LLA). Geodetic coordinates can then be converted to a second map reference known as Mercator Projections, where smaller regions are projected onto a flat mapping surface (that is, Universal Transverse Mercator – UTM or the USGS Grid system). 2 2 CONVERSION BETWEEN ECEF AND LOCAL TANGENTIAL PLANE A reference ellipsoid can be described by a series of parameters that define its shape and b e which include a semi-major axis ( a), a semi-minor axis ( ) and its first eccentricity ( )andits 0 second eccentricity ( e ) as shown in Figure 2. -

Coordinates James R
Coordinates James R. Clynch Naval Postgraduate School, 2002 I. Coordinate Types There are two generic types of coordinates: Cartesian, and Curvilinear of Angular. Those that provide x-y-z type values in meters, kilometers or other distance units are called Cartesian. Those that provide latitude, longitude, and height are called curvilinear or angular. The Cartesian and angular coordinates are equivalent, but only after supplying some extra information. For the spherical earth model only the earth radius is needed. For the ellipsoidal earth, two parameters of the ellipsoid are needed. (These can be any of several sets. The most common is the semi-major axis, called "a", and the flattening, called "f".) II. Cartesian Coordinates A. Generic Cartesian Coordinates These are the coordinates that are used in algebra to plot functions. For a two dimensional system there are two axes, which are perpendicular to each other. The value of a point is represented by the values of the point projected onto the axes. In the figure below the point (5,2) and the standard orientation for the X and Y axes are shown. In three dimensions the same process is used. In this case there are three axis. There is some ambiguity to the orientation of the Z axis once the X and Y axes have been drawn. There 1 are two choices, leading to right and left handed systems. The standard choice, a right hand system is shown below. Rotating a standard (right hand) screw from X into Y advances along the positive Z axis. The point Q at ( -5, -5, 10) is shown. -

ECEF) Coordinate System
2458-6 Workshop on GNSS Data Application to Low Latitude Ionospheric Research 6 - 17 May 2013 Fundamentals of Satellite Navigation HEGARTY Christopher The MITRE Corporation 202 Burlington Rd. / Rte 62 Bedford MA 01730-1420 U.S.A. Fundamentals of Satellite Navigation Chris Hegarty May 2013 1 © 2013 The MITRE Corporation. All rights reserved. Chris Hegarty The MITRE Corporation [email protected] 781-271-2127 (Tel) The contents of this material reflect the views of the author. Neither the Federal Aviation Administration nor the Department of the Transportation makes any warranty or guarantee, or promise, expressed or implied, concerning the content or accuracy of the views expressed herein. 2 Fundamentals of Satellite Navigation ■ Geodesy ■ Time and clocks ■ Satellite orbits ■ Positioning 3 © 2013 The MITRE Corporation. All rights reserved. Earth Centered Inertial (ECI) Coordinate System • Oblateness of the Earth causes direction of axes to move over time • So that coordinate system is truly “inertial” (fixed with respect to stars), it is necessary to fix coordinates • J2000 system fixes coordinates at 11:58:55.816 hours UTC on January 1, 2000 4 © 2013 The MITRE Corporation. All rights reserved. Precession and Nutation Vega Polaris 1.Rotation axis 2. In ~13,000 (now pointing yrs, rotation near Polaris) axis will point near Vega 3. In ~26,000 yrs, back to Earth Polaris •Precession is the large (23.5 deg half-angle) periodic motion •Nutation is a superimposed oscillation (~9 arcsec max) 5 © 2013 The MITRE Corporation. All rights reserved. Earth Centered Earth Fixed (ECEF) Coordinate System Notes: (1) By convention, the z-axis is the mean location of the north pole (spin axis of Earth) for 1900 – 1905, (2) the x-axis passes through 0º longitude, (3) the Earth’s crust moves slowly with respect to this coordinate system! 6 © 2013 The MITRE Corporation. -

Improved Kalman Filter Variants for UAV Tracking with Radar Motion Models
electronics Article Improved Kalman Filter Variants for UAV Tracking with Radar Motion Models Yuan Wei 1 , Tao Hong 2,3 and Michel Kadoch 4,* 1 School of Electronic and Information Engineering, Beihang University, Beijing 100191, China; [email protected] 2 Yunnan Innovation Institute BUAA, Kunming 650233, China; [email protected] · 3 Beijing Key Laboratory for Microwave Sensing and Security Applications, Beihang University, Beijing 100191, China 4 Department of Electrical Engineering, ETS, University of Quebec, Montreal, QC H1A 0A1, Canada * Correspondence: [email protected] Received: 8 April 2020; Accepted: 30 April 2020; Published: 7 May 2020 Abstract: Unmanned aerial vehicles (UAV) have made a huge influence on our everyday life with maturity of technology and more extensive applications. Tracking UAVs has become more and more significant because of not only their beneficial location-based service, but also their potential threats. UAVs are low-altitude, slow-speed, and small targets, which makes it possible to track them with mobile radars, such as vehicle radars and UAVs with radars. Kalman filter and its variant algorithms are widely used to extract useful trajectory information from data mixed with noise. Applying those filter algorithms in east-north-up (ENU) coordinates with mobile radars causes filter performance degradation. To improve this, we made a derivation on the motion-model consistency of mobile radar with constant velocity. Then, extending common filter algorithms into earth-centered earth-fixed (ECEF) coordinates to filter out random errors is proposed. The theory analysis and simulation shows that the improved algorithms provide more efficiency and compatibility in mobile radar scenes. -

Earth Centered Earth Fixed: Blue Marble
Earth Centered Earth Fixed Powered by Blue Marble Noel Zinn Hydrometronics LLC Blue Marble User’s Conference October 2010 My talk this afternoon is about an Earth-Centered Earth-Fixed scheme for geodetically rigorous, 3D visualization. This scheme can be powered by Blue Marble Geographic Calculator. Later on in the talk I’ll provide a URL from which you can download this presentation. 1 Hydrometronics LLC 2 To be clear about the crux of this scheme I present here a capture from the Blue Marble Geographic Calculator (BMGC) showing WGS84 geographical (or geodetic) coordinates on the left (latitude / longitude / height) converted to WGS84 geocentric coordinates on the right (X / Y / Z with respect to the geocenter). The location happens to be the mailbox in front of my home office. Geocentric Cartesian coordinates and Earth-Centered Earth-Fixed are one and the same thing. Now if I were to double click in the WGS84 Coordinate System box on the right I get the next slide. 2 Hydrometronics LLC 3 So, here’s another BMGC capture that explains more closely the selection of Geocentric coordinates in WGS84. On the left of the screen we have some other choices. They are Geodetic and Projected circled in blue. The change from one Coordinate System – or CS - representation of a point to another (among the choices of Geocentric, Geodetic or Projected) is called a conversion in that it is mathematically exact to within the numerical precision of the algorithm and the computer used. On the other hand, the change from one datum to another (loosely called Coordinate Reference System - or CRS - in EPSG speak) is called a transformation because the transformation parameters are empirically derived and, therefore, inexact. -

Introduction to Global Navigation Satellite System (GNSS
Introduction to Global Navigation Satellite System (GNSS) Coordinate Systems, Datum, Geiod Dinesh Manandhar Center for Spatial Information Science The University of Tokyo Contact Information: [email protected] Slide : 1 Dinesh Manandhar, CSIS, The University of Tokyo, [email protected] Geodetic Coordinate System Satellite Pole Semi Minor Axis User at P(x, y, z) Ellipsoid Surface Normal Vector to Ellipsoid at Point P Semi Major Axis Geodetic Latitude at P Equator Semi Major Axis Geodetic Longitude at P Slide : 2 Dinesh Manandhar, CSIS, The University of Tokyo, [email protected] ECEF (Earth Centered, Earth Fixed) ECEF Coordinate System is expressed by assuming the center of the earth coordinate as (0, 0, 0) P (X, Y, Z) (0, 0, 0) Equator Slide : 3 Dinesh Manandhar, CSIS, The University of Tokyo, [email protected] Coordinate Conversion from ECEF to Geodetic and vice versa ECEF (X, Y, Z) to Geodetic Latitude, Longitude & Height to Geodetic Latitude, Longitude & Height ECEF (X, Y, Z) 푍+푒2푏 푠푖푛3휃 휑=atan 푝−푒2푎푐표푠3휃 푋 = 푁 + ℎ cos 휑 cos 휆 휆=atan2 푌, 푋 푌 = 푁 + ℎ cos 휑 sin 휆 푃 ℎ = − N 휑 cos 휑 Z = 푁 1 − 푒2 + ℎ sin 휑 푃 = 푥2 + 푦2 휑 = 퐿푎푡푡푢푑푒 푍푎 휆 = 퐿표푛푡푢푑푒 휃 = 푎푡푎푛 H = Height above Ellipsoid 푃푏 푎 푁 휑 = 1−푒2푠푖푛2휑 Slide : 4 Dinesh Manandhar, CSIS, The University of Tokyo, [email protected] Topographic, Ellipsoidal & Geoid Height Topographic Surface Ellipsoidal Surface h H N Geoid Surface MSL Topographic Height (H) = Ellipsoidal Height (h) - Geoid Height (N) • Geoid Model is based on Gravitation Measurement • In USA, -

Computing GPS Satellite Velocity and Acceleration from the Broadcast
Computing GPS Satellite Velocity and Acceleration from the Broadcast Navigation Message Blair F. Thompson , Steven W. Lewis , Steven A. Brown Lt. Colonel, 42d Combat Training Squadron, Peterson Air Force Base, Colorado Todd M. Scott Command Chief Master Sergeant, 310th Space Wing, Schriever Air Force Base, Colorado ABSTRACT We present an extension to the Global Positioning System (GPS) broadcast navigation message user equations for computing GPS space vehicle (SV) velocity and acceleration. Although similar extensions have been published (e.g., Remondi,1 Zhang J.,2 Zhang W.3), the extension presented herein includes a distinct kinematic method for computing SV acceleration which significantly reduces the complexity of the equations and improves the mean magnitude results by approximately one order of magnitude by including oblate Earth perturbation effects. Additionally, detailed anal- yses and validation results using multiple days of precise ephemeris data and multiple broadcast navigation messages are presented. Improvements in the equations for computing SV position are also included, removing ambiguity and redundancy in the existing user equations. The recommended changes make the user equations more complete and more suitable for implementation in a wide variety of programming languages employed by GPS users. Furthermore, relativistic SV clock error rate computation is enabled by the recommended equations. A complete, stand-alone table of the equations in the format and notation of the GPS interface specification4 is provided, along with benchmark test cases to simplify implementation and verification. 1 j INTRODUCTION Basic positioning of a Global Positioning System (GPS) receiver requires accurate modeling of the location of the antenna phase center of four or more orbiting space vehicles (SV) in view. -

Lecture 6: Orientation in Space and the Orbital Plane Introduction
Spacecraft Dynamics and Control Matthew M. Peet Arizona State University Lecture 6: Orientation in Space and The Orbital Plane Introduction In this Lecture, you will learn: The Orbital Plane • Inclination • Right Ascension • Argument of Periapse New Concept: Celestial Coordinate Systems • The Earth-Centered Inertial reference frame • The line of nodes Orientation of the 2D Orbit in 3D space • How to construct all orbital elements from ~r and ~v • A Numerical Illustration M. Peet Lecture 6: Spacecraft Dynamics 2 / 32 The Orbital Elements 2D orbits So far, all orbits are parameterized by 3 parameters • semimajor axis, a • eccentricity, e • true anomaly, f • a and e define the geometry of the orbit. • f describes the position within the orbit (a proxy for time). M. Peet Lecture 6: Spacecraft Dynamics 3 / 32 The Orbital Elements But orbits are not 2-dimensional! M. Peet Lecture 6: Spacecraft Dynamics 4 / 32 The Orbital Elements Note: We have shown how to use a, e and f to find the scalars r and v. Question: How do we find the vectors ~r and ~v? Answer: We have to determine how the orbit is oriented in space. • Orientation is determined by vectors ~e and ~h. • We need 3 new orbital elements I Orientation can be determined by 3 rotations. M. Peet Lecture 6: Spacecraft Dynamics 5 / 32 Lecture 6 The Orbital Elements Note: We have shown how to use a, e and f to find the scalars r and v. Spacecraft Dynamics The Orbital Elements Question: How do we find the vectors ~r and ~v? Answer: We have to determine how the orbit is oriented in space. -

Accurate Conversion of Earth-Fixed Earth-Centered Coordinates to Geodetic Coordinates Karl Osen
Accurate Conversion of Earth-Fixed Earth-Centered Coordinates to Geodetic Coordinates Karl Osen To cite this version: Karl Osen. Accurate Conversion of Earth-Fixed Earth-Centered Coordinates to Geodetic Coordinates. [Research Report] Norwegian University of Science and Technology. 2017. hal-01704943v2 HAL Id: hal-01704943 https://hal.archives-ouvertes.fr/hal-01704943v2 Submitted on 31 Oct 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Accurate Conversion of Earth-Fixed Earth-Centered Coordinates to Geodetic Coordinates Karl Osen 31 October 2019 Abstract A closed form algorithm for the exact transformation of Earth-Centered Earth-Fixed (ECEF) coordinates to geodetic coordinates is presented that is computationally fast, safe and accurate. Boosting the computational robustness of Jijie Zhu’s algorithm, it reduces the worst case transformation error by up to 500 million times. Zhu’s Algorithm In 1993 Jijie Zhu published [1] the following closed form algorithm for the exact transformation of Earth-Centered Earth-Fixed (ECEF) coordinates to geodetic -

Controls Algorithm for a Satellite Using Earth's Magnetic Field: Orbit Maneuvers and Attitude Positioning
University of Central Florida STARS Electronic Theses and Dissertations, 2004-2019 2007 Controls Algorithm For A Satellite Using Earth's Magnetic Field: Orbit Maneuvers And Attitude Positioning Karthik Ganesh University of Central Florida Part of the Aerospace Engineering Commons Find similar works at: https://stars.library.ucf.edu/etd University of Central Florida Libraries http://library.ucf.edu This Masters Thesis (Open Access) is brought to you for free and open access by STARS. It has been accepted for inclusion in Electronic Theses and Dissertations, 2004-2019 by an authorized administrator of STARS. For more information, please contact [email protected]. STARS Citation Ganesh, Karthik, "Controls Algorithm For A Satellite Using Earth's Magnetic Field: Orbit Maneuvers And Attitude Positioning" (2007). Electronic Theses and Dissertations, 2004-2019. 3169. https://stars.library.ucf.edu/etd/3169 CONTROLS ALGORITHM FOR A SATELLITE USING EARTH’SMAGNETIC FIELD: ORBIT MANEUVERS & ATTITUDE POSITIONING by KARTHIK G. GANESH B.Tech,SASTRA University,2005 A thesis submitted in partial ful…llment of the requirements for the degree of Master of Science in Aerospace Engineering in the Department of Mechanical, Materials and Aerospace Engineering in the College of Engineering and Computer Science at the University of Central Florida Orlando,Florida Fall Term 2007 Major Professor : Roger.W.Johnson c 2007 Karthik G. Ganesh ii ABSTRACT This document describes the design, analysis of Orbit Maneuvers and Attitude Con- trol for NanoSat class satellites, which uses an electro-magnetic force controller which was proposed by the Florida Space Institute (FSI). Orbit Maneuvering and the Attitude Control System (ACS) play a very important role for the success of this mission, as that can allow making the satellite go to the desired orbit as well do the sun pointing of the solar arrays with su¢ cient accuracy to achieve desired power levels. -

Theoretical Limits of Lunar Vision Aided Navigation with Inertial Navigation System David W
Air Force Institute of Technology AFIT Scholar Theses and Dissertations Student Graduate Works 3-26-2015 Theoretical Limits of Lunar Vision Aided Navigation with Inertial Navigation System David W. Jones Follow this and additional works at: https://scholar.afit.edu/etd Part of the Navigation, Guidance, Control and Dynamics Commons Recommended Citation Jones, David W., "Theoretical Limits of Lunar Vision Aided Navigation with Inertial Navigation System" (2015). Theses and Dissertations. 37. https://scholar.afit.edu/etd/37 This Thesis is brought to you for free and open access by the Student Graduate Works at AFIT Scholar. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of AFIT Scholar. For more information, please contact [email protected]. THEORETICAL LIMITS OF LUNAR VISION AIDED NAVIGATION WITH INERTIAL NAVIGATION SYSTEM THESIS David W. Jones, Capt, USAF AFIT-ENG-MS-15-M-020 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson Air Force Base, Ohio DISTRIBUTION STATEMENT A APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED. The views expressed in this document are those of the author and do not reflect the official policy or position of the United States Air Force, the United States Department of Defense or the United States Government. This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States. AFIT-ENG-MS-15-M-020 THEORETICAL LIMITS OF LUNAR VISION AIDED NAVIGATION WITH INERTIAL NAVIGATION SYSTEM THESIS Presented to the Faculty Department of Electrical and Computer Engineering Graduate School of Engineering and Management Air Force Institute of Technology Air University Air Education and Training Command in Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical Engineering David W. -
A Theoretical Optimum Tilt Angle Model for Solar Collectors from Keplerian Orbit
energies Article A Theoretical Optimum Tilt Angle Model for Solar Collectors from Keplerian Orbit Tong Liu, Li Liu *, Yufang He, Mengfei Sun, Jian Liu and Guochang Xu * Laboratory of Navigation and Remote Sensing, Institute of Space Science and Applied Technology, Harbin Institute of Technology at Shenzhen, Shenzhen 518055, China; [email protected] (T.L.); [email protected] (Y.H.); [email protected] (M.S.); [email protected] (J.L.) * Correspondence: [email protected] (L.L.); [email protected] (G.X.) Abstract: Solar energy has been extensively used in industry and everyday life. A more suitable solar collector orientation can increase its utilization. Many studies have explored the best orientation of the solar collector installation from the perspective of data analysis and local-area cases. Investigating the optimal tilt angle of a collector from the perspective of data analysis, or guiding the angle of solar collector installation, requires an a priori theoretical tilt angle as a support. However, none of the current theoretical studies have taken the real motion of the Sun into account. Furthermore, a complete set of theoretical optimal tilt angles for solar energy is necessary for worldwide locations. Therefore, from the view of astronomical mechanics, considering the true orbit of the Sun, a mathe- matical model that is universal across the globe is proposed: the Kepler motion model is constructed from the solar orbit and transformed into the local Earth coordinate system. After that, the calculation of the optimal tilt angle solution is given. Finally, several examples are shown to demonstrate the variation of the optimal solar angle with month and latitude.