Lecture 6: Orientation in Space and the Orbital Plane Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Appendix a Orbits
Appendix A Orbits As discussed in the Introduction, a good ¯rst approximation for satellite motion is obtained by assuming the spacecraft is a point mass or spherical body moving in the gravitational ¯eld of a spherical planet. This leads to the classical two-body problem. Since we use the term body to refer to a spacecraft of ¯nite size (as in rigid body), it may be more appropriate to call this the two-particle problem, but I will use the term two-body problem in its classical sense. The basic elements of orbital dynamics are captured in Kepler's three laws which he published in the 17th century. His laws were for the orbital motion of the planets about the Sun, but are also applicable to the motion of satellites about planets. The three laws are: 1. The orbit of each planet is an ellipse with the Sun at one focus. 2. The line joining the planet to the Sun sweeps out equal areas in equal times. 3. The square of the period of a planet is proportional to the cube of its mean distance to the sun. The ¯rst law applies to most spacecraft, but it is also possible for spacecraft to travel in parabolic and hyperbolic orbits, in which case the period is in¯nite and the 3rd law does not apply. However, the 2nd law applies to all two-body motion. Newton's 2nd law and his law of universal gravitation provide the tools for generalizing Kepler's laws to non-elliptical orbits, as well as for proving Kepler's laws. -

Astrodynamics
Politecnico di Torino SEEDS SpacE Exploration and Development Systems Astrodynamics II Edition 2006 - 07 - Ver. 2.0.1 Author: Guido Colasurdo Dipartimento di Energetica Teacher: Giulio Avanzini Dipartimento di Ingegneria Aeronautica e Spaziale e-mail: [email protected] Contents 1 Two–Body Orbital Mechanics 1 1.1 BirthofAstrodynamics: Kepler’sLaws. ......... 1 1.2 Newton’sLawsofMotion ............................ ... 2 1.3 Newton’s Law of Universal Gravitation . ......... 3 1.4 The n–BodyProblem ................................. 4 1.5 Equation of Motion in the Two-Body Problem . ....... 5 1.6 PotentialEnergy ................................. ... 6 1.7 ConstantsoftheMotion . .. .. .. .. .. .. .. .. .... 7 1.8 TrajectoryEquation .............................. .... 8 1.9 ConicSections ................................... 8 1.10 Relating Energy and Semi-major Axis . ........ 9 2 Two-Dimensional Analysis of Motion 11 2.1 ReferenceFrames................................. 11 2.2 Velocity and acceleration components . ......... 12 2.3 First-Order Scalar Equations of Motion . ......... 12 2.4 PerifocalReferenceFrame . ...... 13 2.5 FlightPathAngle ................................. 14 2.6 EllipticalOrbits................................ ..... 15 2.6.1 Geometry of an Elliptical Orbit . ..... 15 2.6.2 Period of an Elliptical Orbit . ..... 16 2.7 Time–of–Flight on the Elliptical Orbit . .......... 16 2.8 Extensiontohyperbolaandparabola. ........ 18 2.9 Circular and Escape Velocity, Hyperbolic Excess Speed . .............. 18 2.10 CosmicVelocities -
The Observer's Handbook for 1912
T he O bservers H andbook FOR 1912 PUBLISHED BY THE ROYAL ASTRONOMICAL SOCIETY OF CANADA E d i t e d b y C. A, CHANT FOURTH YEAR OF PUBLICATION TORONTO 198 C o l l e g e St r e e t Pr in t e d fo r t h e So c ie t y 1912 T he Observers Handbook for 1912 PUBLISHED BY THE ROYAL ASTRONOMICAL SOCIETY OF CANADA TORONTO 198 C o l l e g e St r e e t Pr in t e d fo r t h e S o c ie t y 1912 PREFACE Some changes have been made in the Handbook this year which, it is believed, will commend themselves to observers. In previous issues the times of sunrise and sunset have been given for a small number of selected places in the standard time of each place. On account of the arbitrary correction which must be made to the mean time of any place in order to get its standard time, the tables given for a particualar place are of little use any where else, In order to remedy this the times of sunrise and sunset have been calculated for places on five different latitudes covering the populous part of Canada, (pages 10 to 21), while the way to use these tables at a large number of towns and cities is explained on pages 8 and 9. The other chief change is in the addition of fuller star maps near the end. These are on a large enough scale to locate a star or planet or comet when its right ascension and declination are given. -
Earth-Centred Universe
Earth-centred Universe The fixed stars appear on the celestial sphere Earth rotates in one sidereal day The solar day is longer by about 4 minutes → scattered sunlight obscures the stars by day The constellations are historical → learn to recognise: Ursa Major, Ursa Minor, Cassiopeia, Pegasus, Auriga, Gemini, Orion, Taurus Sun’s Motion in the Sky The Sun moves West to East against the background of Stars Stars Stars stars Us Us Us Sun Sun Sun z z z Start 1 sidereal day later 1 solar day later Compared to the stars, the Sun takes on average 3 min 56.5 sec extra to go round once The Sun does not travel quite at a constant speed, making the actual length of a solar day vary throughout the year Pleiades Stars near the Sun Sun Above the atmosphere: stars seen near the Sun by the SOHO probe Shield Sun in Taurus Image: Hyades http://sohowww.nascom.nasa.g ov//data/realtime/javagif/gifs/20 070525_0042_c3.gif Constellations Figures courtesy: K & K From The Beauty of the Heavens by C. F. Blunt (1842) The Celestial Sphere The celestial sphere rotates anti-clockwise looking north → Its fixed points are the north celestial pole and the south celestial pole All the stars on the celestial equator are above the Earth’s equator How high in the sky is the pole star? It is as high as your latitude on the Earth Motion of the Sky (animated ) Courtesy: K & K Pole Star above the Horizon To north celestial pole Zenith The latitude of Northern horizon Aberdeen is the angle at 57º the centre of the Earth A Earth shown in the diagram as 57° 57º Equator Centre The pole star is the same angle above the northern horizon as your latitude. -

Calibration of the Angular Momenta of the Minor Planets in the Solar System Jian Li1, Zhihong Jeff Xia2, Liyong Zhou1
Astronomy & Astrophysics manuscript no. arXiv c ESO 2019 September 26, 2019 Calibration of the angular momenta of the minor planets in the solar system Jian Li1, Zhihong Jeff Xia2, Liyong Zhou1 1School of Astronomy and Space Science & Key Laboratory of Modern Astronomy and Astrophysics in Ministry of Education, Nanjing University, 163 Xianlin Road, Nanjing 210023, PR China e-mail: [email protected] 2Department of Mathematics, Northwestern University, 2033 Sheridan Road, Evanston, IL 60208, USA e-mail: [email protected] September 26, 2019 ABSTRACT Aims. We aim to determine the relative angle between the total angular momentum of the minor planets and that of the Sun-planets system, and to improve the orientation of the invariable plane of the solar system. Methods. By utilizing physical parameters available in public domain archives, we assigned reasonable masses to 718041 minor plan- ets throughout the solar system, including near-Earth objects, main belt asteroids, Jupiter trojans, trans-Neptunian objects, scattered- disk objects, and centaurs. Then we combined the orbital data to calibrate the angular momenta of these small bodies, and evaluated the specific contribution of the massive dwarf planets. The effects of uncertainties on the mass determination and the observational incompleteness were also estimated. Results. We determine the total angular momentum of the known minor planets to be 1:7817 × 1046 g · cm2 · s−1. The relative angle α between this vector and the total angular momentum of the Sun-planets system is calculated to be about 14:74◦. By excluding the dwarf planets Eris, Pluto, and Haumea, which have peculiar angular momentum directions, the angle α drops sharply to 1:76◦; a similar result applies to each individual minor planet group (e.g., trans-Neptunian objects). -

Trajectory Coordinate System Information We Have Calculated the New Horizons Trajectory and Full State Vector Information in 11 Different Coordinate Systems
Trajectory Coordinate System Information We have calculated the New Horizons trajectory and full state vector information in 11 different coordinate systems. Below we describe the coordinate systems, and in the next section we describe the trajectory file format. Heliographic Inertial (HGI) This system is Sun centered with the X-axis along the intersection line of the ecliptic (zero longitude occurs at the +X-axis) and solar equatorial planes. The Z-axis is perpendicular to the solar equator, and the Y-axis completes the right-handed system. This coordinate system is also referred to as the Heliocentric Inertial (HCI) system. Heliocentric Aries Ecliptic Date (HAE-DATE) This coordinate system is heliocentric system with the Z-axis normal to the ecliptic plane and the X-axis pointes toward the first point of Aries on the Vernal Equinox, and the Y- axis completes the right-handed system. This coordinate system is also referred to as the Solar Ecliptic (SE) coordinate system. The word “Date” refers to the time at which one defines the Vernal Equinox. In this case the date observation is used. Heliocentric Aries Ecliptic J2000 (HAE-J2000) This coordinate system is heliocentric system with the Z-axis normal to the ecliptic plane and the X-axis pointes toward the first point of Aries on the Vernal Equinox, and the Y- axis completes the right-handed system. This coordinate system is also referred to as the Solar Ecliptic (SE) coordinate system. The label “J2000” refers to the time at which one defines the Vernal Equinox. In this case it is defined at the J2000 date, which is January 1, 2000 at noon. -
Datum Transformations of GPS Positions Application Note
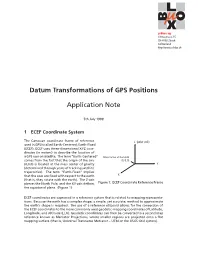
µ-blox ag Gloriastrasse 35 CH-8092 Zürich Switzerland http://www.u-blox.ch Datum Transformations of GPS Positions Application Note 5th July 1999 1 ECEF Coordinate System The Cartesian coordinate frame of reference used in GPS is called Earth-Centered, Earth-Fixed (ECEF). ECEF uses three-dimensional XYZ coor- dinates (in meters) to describe the location of a GPS user or satellite. The term "Earth-Centered" comes from the fact that the origin of the axis (0,0,0) is located at the mass center of gravity (determined through years of tracking satellite trajectories). The term "Earth-Fixed" implies that the axes are fixed with respect to the earth (that is, they rotate with the earth). The Z-axis pierces the North Pole, and the XY-axis defines Figure 1: ECEF Coordinate Reference Frame the equatorial plane. (Figure 1) ECEF coordinates are expressed in a reference system that is related to mapping representa- tions. Because the earth has a complex shape, a simple, yet accurate, method to approximate the earth’s shape is required. The use of a reference ellipsoid allows for the conversion of the ECEF coordinates to the more commonly used geodetic-mapping coordinates of Latitude, Longitude, and Altitude (LLA). Geodetic coordinates can then be converted to a second map reference known as Mercator Projections, where smaller regions are projected onto a flat mapping surface (that is, Universal Transverse Mercator – UTM or the USGS Grid system). 2 2 CONVERSION BETWEEN ECEF AND LOCAL TANGENTIAL PLANE A reference ellipsoid can be described by a series of parameters that define its shape and b e which include a semi-major axis ( a), a semi-minor axis ( ) and its first eccentricity ( )andits 0 second eccentricity ( e ) as shown in Figure 2. -

Elliptical Orbits
1 Ellipse-geometry 1.1 Parameterization • Functional characterization:(a: semi major axis, b ≤ a: semi minor axis) x2 y 2 b p + = 1 ⇐⇒ y(x) = · ± a2 − x2 (1) a b a • Parameterization in cartesian coordinates, which follows directly from Eq. (1): x a · cos t = with 0 ≤ t < 2π (2) y b · sin t – The origin (0, 0) is the center of the ellipse and the auxilliary circle with radius a. √ – The focal points are located at (±a · e, 0) with the eccentricity e = a2 − b2/a. • Parameterization in polar coordinates:(p: parameter, 0 ≤ < 1: eccentricity) p r(ϕ) = (3) 1 + e cos ϕ – The origin (0, 0) is the right focal point of the ellipse. – The major axis is given by 2a = r(0) − r(π), thus a = p/(1 − e2), the center is therefore at − pe/(1 − e2), 0. – ϕ = 0 corresponds to the periapsis (the point closest to the focal point; which is also called perigee/perihelion/periastron in case of an orbit around the Earth/sun/star). The relation between t and ϕ of the parameterizations in Eqs. (2) and (3) is the following: t r1 − e ϕ tan = · tan (4) 2 1 + e 2 1.2 Area of an elliptic sector As an ellipse is a circle with radius a scaled by a factor b/a in y-direction (Eq. 1), the area of an elliptic sector PFS (Fig. ??) is just this fraction of the area PFQ in the auxiliary circle. b t 2 1 APFS = · · πa − · ae · a sin t a 2π 2 (5) 1 = (t − e sin t) · a b 2 The area of the full ellipse (t = 2π) is then, of course, Aellipse = π a b (6) Figure 1: Ellipse and auxilliary circle. -

Multi-Body Trajectory Design Strategies Based on Periapsis Poincaré Maps
MULTI-BODY TRAJECTORY DESIGN STRATEGIES BASED ON PERIAPSIS POINCARÉ MAPS A Dissertation Submitted to the Faculty of Purdue University by Diane Elizabeth Craig Davis In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy August 2011 Purdue University West Lafayette, Indiana ii To my husband and children iii ACKNOWLEDGMENTS I would like to thank my advisor, Professor Kathleen Howell, for her support and guidance. She has been an invaluable source of knowledge and ideas throughout my studies at Purdue, and I have truly enjoyed our collaborations. She is an inspiration to me. I appreciate the insight and support from my committee members, Professor James Longuski, Professor Martin Corless, and Professor Daniel DeLaurentis. I would like to thank the members of my research group, past and present, for their friendship and collaboration, including Geoff Wawrzyniak, Chris Patterson, Lindsay Millard, Dan Grebow, Marty Ozimek, Lucia Irrgang, Masaki Kakoi, Raoul Rausch, Matt Vavrina, Todd Brown, Amanda Haapala, Cody Short, Mar Vaquero, Tom Pavlak, Wayne Schlei, Aurelie Heritier, Amanda Knutson, and Jeff Stuart. I thank my parents, David and Jeanne Craig, for their encouragement and love throughout my academic career. They have cheered me on through many years of studies. I am grateful for the love and encouragement of my husband, Jonathan. His never-ending patience and friendship have been a constant source of support. Finally, I owe thanks to the organizations that have provided the funding opportunities that have supported me through my studies, including the Clare Booth Luce Foundation, Zonta International, and Purdue University and the School of Aeronautics and Astronautics through the Graduate Assistance in Areas of National Need and the Purdue Forever Fellowships. -

Tilting Saturn II. Numerical Model
Tilting Saturn II. Numerical Model Douglas P. Hamilton Astronomy Department, University of Maryland College Park, MD 20742 [email protected] and William R. Ward Southwest Research Institute Boulder, CO 80303 [email protected] Received ; accepted Submitted to the Astronomical Journal, December 2003 Resubmitted to the Astronomical Journal, June 2004 – 2 – ABSTRACT We argue that the gas giants Jupiter and Saturn were both formed with their rotation axes nearly perpendicular to their orbital planes, and that the large cur- rent tilt of the ringed planet was acquired in a post formation event. We identify the responsible mechanism as trapping into a secular spin-orbit resonance which couples the angular momentum of Saturn’s rotation to that of Neptune’s orbit. Strong support for this model comes from i) a near match between the precession frequencies of Saturn’s pole and the orbital pole of Neptune and ii) the current directions that these poles point in space. We show, with direct numerical inte- grations, that trapping into the spin-orbit resonance and the associated growth in Saturn’s obliquity is not disrupted by other planetary perturbations. Subject headings: planets and satellites: individual (Saturn, Neptune) — Solar System: formation — Solar System: general 1. INTRODUCTION The formation of the Solar System is thought to have begun with a cold interstellar gas cloud that collapsed under its own self-gravity. Angular momentum was preserved during the process so that the young Sun was initially surrounded by the Solar Nebula, a spinning disk of gas and dust. From this disk, planets formed in a sequence of stages whose details are still not fully understood. -

3.- the Geographic Position of a Celestial Body
Chapter 3 Copyright © 1997-2004 Henning Umland All Rights Reserved Geographic Position and Time Geographic terms In celestial navigation, the earth is regarded as a sphere. Although this is an approximation, the geometry of the sphere is applied successfully, and the errors caused by the flattening of the earth are usually negligible (chapter 9). A circle on the surface of the earth whose plane passes through the center of the earth is called a great circle . Thus, a great circle has the greatest possible diameter of all circles on the surface of the earth. Any circle on the surface of the earth whose plane does not pass through the earth's center is called a small circle . The equator is the only great circle whose plane is perpendicular to the polar axis , the axis of rotation. Further, the equator is the only parallel of latitude being a great circle. Any other parallel of latitude is a small circle whose plane is parallel to the plane of the equator. A meridian is a great circle going through the geographic poles , the points where the polar axis intersects the earth's surface. The upper branch of a meridian is the half from pole to pole passing through a given point, e. g., the observer's position. The lower branch is the opposite half. The Greenwich meridian , the meridian passing through the center of the transit instrument at the Royal Greenwich Observatory , was adopted as the prime meridian at the International Meridian Conference in 1884. Its upper branch is the reference for measuring longitudes (0°...+180° east and 0°...–180° west), its lower branch (180°) is the basis for the International Dateline (Fig. -

Perturbation Theory in Celestial Mechanics
Perturbation Theory in Celestial Mechanics Alessandra Celletti Dipartimento di Matematica Universit`adi Roma Tor Vergata Via della Ricerca Scientifica 1, I-00133 Roma (Italy) ([email protected]) December 8, 2007 Contents 1 Glossary 2 2 Definition 2 3 Introduction 2 4 Classical perturbation theory 4 4.1 The classical theory . 4 4.2 The precession of the perihelion of Mercury . 6 4.2.1 Delaunay action–angle variables . 6 4.2.2 The restricted, planar, circular, three–body problem . 7 4.2.3 Expansion of the perturbing function . 7 4.2.4 Computation of the precession of the perihelion . 8 5 Resonant perturbation theory 9 5.1 The resonant theory . 9 5.2 Three–body resonance . 10 5.3 Degenerate perturbation theory . 11 5.4 The precession of the equinoxes . 12 6 Invariant tori 14 6.1 Invariant KAM surfaces . 14 6.2 Rotational tori for the spin–orbit problem . 15 6.3 Librational tori for the spin–orbit problem . 16 6.4 Rotational tori for the restricted three–body problem . 17 6.5 Planetary problem . 18 7 Periodic orbits 18 7.1 Construction of periodic orbits . 18 7.2 The libration in longitude of the Moon . 20 1 8 Future directions 20 9 Bibliography 21 9.1 Books and Reviews . 21 9.2 Primary Literature . 22 1 Glossary KAM theory: it provides the persistence of quasi–periodic motions under a small perturbation of an integrable system. KAM theory can be applied under quite general assumptions, i.e. a non– degeneracy of the integrable system and a diophantine condition of the frequency of motion.