Coordinates James R
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Analysis of Perturbations and Station-Keeping Requirements in Highly-Inclined Geosynchronous Orbits
ANALYSIS OF PERTURBATIONS AND STATION-KEEPING REQUIREMENTS IN HIGHLY-INCLINED GEOSYNCHRONOUS ORBITS Elena Fantino(1), Roberto Flores(2), Alessio Di Salvo(3), and Marilena Di Carlo(4) (1)Space Studies Institute of Catalonia (IEEC), Polytechnic University of Catalonia (UPC), E.T.S.E.I.A.T., Colom 11, 08222 Terrassa (Spain), [email protected] (2)International Center for Numerical Methods in Engineering (CIMNE), Polytechnic University of Catalonia (UPC), Building C1, Campus Norte, UPC, Gran Capitan,´ s/n, 08034 Barcelona (Spain) (3)NEXT Ingegneria dei Sistemi S.p.A., Space Innovation System Unit, Via A. Noale 345/b, 00155 Roma (Italy), [email protected] (4)Department of Mechanical and Aerospace Engineering, University of Strathclyde, 75 Montrose Street, Glasgow G1 1XJ (United Kingdom), [email protected] Abstract: There is a demand for communications services at high latitudes that is not well served by conventional geostationary satellites. Alternatives using low-altitude orbits require too large constellations. Other options are the Molniya and Tundra families (critically-inclined, eccentric orbits with the apogee at high latitudes). In this work we have considered derivatives of the Tundra type with different inclinations and eccentricities. By means of a high-precision model of the terrestrial gravity field and the most relevant environmental perturbations, we have studied the evolution of these orbits during a period of two years. The effects of the different perturbations on the constellation ground track (which is more important for coverage than the orbital elements themselves) have been identified. We show that, in order to maintain the ground track unchanged, the most important parameters are the orbital period and the argument of the perigee. -

Astrodynamics
Politecnico di Torino SEEDS SpacE Exploration and Development Systems Astrodynamics II Edition 2006 - 07 - Ver. 2.0.1 Author: Guido Colasurdo Dipartimento di Energetica Teacher: Giulio Avanzini Dipartimento di Ingegneria Aeronautica e Spaziale e-mail: [email protected] Contents 1 Two–Body Orbital Mechanics 1 1.1 BirthofAstrodynamics: Kepler’sLaws. ......... 1 1.2 Newton’sLawsofMotion ............................ ... 2 1.3 Newton’s Law of Universal Gravitation . ......... 3 1.4 The n–BodyProblem ................................. 4 1.5 Equation of Motion in the Two-Body Problem . ....... 5 1.6 PotentialEnergy ................................. ... 6 1.7 ConstantsoftheMotion . .. .. .. .. .. .. .. .. .... 7 1.8 TrajectoryEquation .............................. .... 8 1.9 ConicSections ................................... 8 1.10 Relating Energy and Semi-major Axis . ........ 9 2 Two-Dimensional Analysis of Motion 11 2.1 ReferenceFrames................................. 11 2.2 Velocity and acceleration components . ......... 12 2.3 First-Order Scalar Equations of Motion . ......... 12 2.4 PerifocalReferenceFrame . ...... 13 2.5 FlightPathAngle ................................. 14 2.6 EllipticalOrbits................................ ..... 15 2.6.1 Geometry of an Elliptical Orbit . ..... 15 2.6.2 Period of an Elliptical Orbit . ..... 16 2.7 Time–of–Flight on the Elliptical Orbit . .......... 16 2.8 Extensiontohyperbolaandparabola. ........ 18 2.9 Circular and Escape Velocity, Hyperbolic Excess Speed . .............. 18 2.10 CosmicVelocities -
AIM: Latitude and Longitude
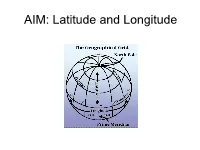
AIM: Latitude and Longitude Latitude lines run east/west but they measure north or south of the equator (0°) splitting the earth into the Northern Hemisphere and Southern Hemisphere. Latitude North Pole 90 80 Lines of 70 60 latitude are 50 numbered 40 30 from 0° at 20 Lines of [ 10 the equator latitude are 10 to 90° N.L. 20 numbered 30 at the North from 0° at 40 Pole. 50 the equator ] 60 to 90° S.L. 70 80 at the 90 South Pole. South Pole Latitude The North Pole is at 90° N 40° N is the 40° The equator is at 0° line of latitude north of the latitude. It is neither equator. north nor south. It is at the center 40° S is the 40° between line of latitude north and The South Pole is at 90° S south of the south. equator. Longitude Lines of longitude begin at the Prime Meridian. 60° W is the 60° E is the 60° line of 60° line of longitude west longitude of the Prime east of the W E Prime Meridian. Meridian. The Prime Meridian is located at 0°. It is neither east or west 180° N Longitude West Longitude West East Longitude North Pole W E PRIME MERIDIAN S Lines of longitude are numbered east from the Prime Meridian to the 180° line and west from the Prime Meridian to the 180° line. Prime Meridian The Prime Meridian (0°) and the 180° line split the earth into the Western Hemisphere and Eastern Hemisphere. Prime Meridian Western Eastern Hemisphere Hemisphere Places located east of the Prime Meridian have an east longitude (E) address. -

Handbook of Satellite Orbits from Kepler to GPS Michel Capderou
Handbook of Satellite Orbits From Kepler to GPS Michel Capderou Handbook of Satellite Orbits From Kepler to GPS Translated by Stephen Lyle Foreword by Charles Elachi, Director, NASA Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California, USA 123 Michel Capderou Universite´ Pierre et Marie Curie Paris, France ISBN 978-3-319-03415-7 ISBN 978-3-319-03416-4 (eBook) DOI 10.1007/978-3-319-03416-4 Springer Cham Heidelberg New York Dordrecht London Library of Congress Control Number: 2014930341 © Springer International Publishing Switzerland 2014 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. Exempted from this legal reservation are brief excerpts in connection with reviews or scholarly analysis or material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Duplication of this pub- lication or parts thereof is permitted only under the provisions of the Copyright Law of the Publisher’s location, in its current version, and permission for use must always be obtained from Springer. Permis- sions for use may be obtained through RightsLink at the Copyright Clearance Center. Violations are liable to prosecution under the respective Copyright Law. The use of general descriptive names, registered names, trademarks, service marks, etc. -
Datum Transformations of GPS Positions Application Note
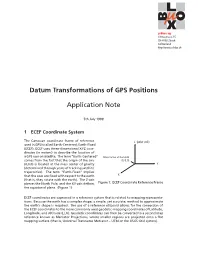
µ-blox ag Gloriastrasse 35 CH-8092 Zürich Switzerland http://www.u-blox.ch Datum Transformations of GPS Positions Application Note 5th July 1999 1 ECEF Coordinate System The Cartesian coordinate frame of reference used in GPS is called Earth-Centered, Earth-Fixed (ECEF). ECEF uses three-dimensional XYZ coor- dinates (in meters) to describe the location of a GPS user or satellite. The term "Earth-Centered" comes from the fact that the origin of the axis (0,0,0) is located at the mass center of gravity (determined through years of tracking satellite trajectories). The term "Earth-Fixed" implies that the axes are fixed with respect to the earth (that is, they rotate with the earth). The Z-axis pierces the North Pole, and the XY-axis defines Figure 1: ECEF Coordinate Reference Frame the equatorial plane. (Figure 1) ECEF coordinates are expressed in a reference system that is related to mapping representa- tions. Because the earth has a complex shape, a simple, yet accurate, method to approximate the earth’s shape is required. The use of a reference ellipsoid allows for the conversion of the ECEF coordinates to the more commonly used geodetic-mapping coordinates of Latitude, Longitude, and Altitude (LLA). Geodetic coordinates can then be converted to a second map reference known as Mercator Projections, where smaller regions are projected onto a flat mapping surface (that is, Universal Transverse Mercator – UTM or the USGS Grid system). 2 2 CONVERSION BETWEEN ECEF AND LOCAL TANGENTIAL PLANE A reference ellipsoid can be described by a series of parameters that define its shape and b e which include a semi-major axis ( a), a semi-minor axis ( ) and its first eccentricity ( )andits 0 second eccentricity ( e ) as shown in Figure 2. -

Prime Meridian ×
This website would like to remind you: Your browser (Apple Safari 4) is out of date. Update your browser for more × security, comfort and the best experience on this site. Encyclopedic Entry prime meridian For the complete encyclopedic entry with media resources, visit: http://education.nationalgeographic.com/encyclopedia/prime-meridian/ The prime meridian is the line of 0 longitude, the starting point for measuring distance both east and west around the Earth. The prime meridian is arbitrary, meaning it could be chosen to be anywhere. Any line of longitude (a meridian) can serve as the 0 longitude line. However, there is an international agreement that the meridian that runs through Greenwich, England, is considered the official prime meridian. Governments did not always agree that the Greenwich meridian was the prime meridian, making navigation over long distances very difficult. Different countries published maps and charts with longitude based on the meridian passing through their capital city. France would publish maps with 0 longitude running through Paris. Cartographers in China would publish maps with 0 longitude running through Beijing. Even different parts of the same country published materials based on local meridians. Finally, at an international convention called by U.S. President Chester Arthur in 1884, representatives from 25 countries agreed to pick a single, standard meridian. They chose the meridian passing through the Royal Observatory in Greenwich, England. The Greenwich Meridian became the international standard for the prime meridian. UTC The prime meridian also sets Coordinated Universal Time (UTC). UTC never changes for daylight savings or anything else. Just as the prime meridian is the standard for longitude, UTC is the standard for time. -

Civil Twilight Duration (Sunset to Solar Depression
Civil Twilight Duration (sunset to solar depression 6°) at the Prime Meridian, Sea Level, Northern Hemisphere (March 1, 2007 to March 31, 2008) Mar 1 Mar 15 Mar 29 Apr 12 Apr 26 May 10 May 24 7 Jun 21 Jun Jul 5 Jul 19 Aug 2 Aug 16 Aug 30 Sep 13 Sep 27 11 Oct 25 Oct Nov 8 Nov 22 Dec 6 Dec 20 Jan 3 Jan 17 Jan 31 14 Feb 28 Feb Mar 13 Mar 27 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 Civil Twilight Duration (daytime temporal minutes after sunset) after minutes temporal (daytime Duration Civil Twilight 23.5° N 30° N 100 40° N 45° N 105 50° N 55° N 58° N 59° N 110 60° N 61° N Northward Equinox North Solstice 115 Southward Equinox South Solstice 120 Analysis by Dr. Irv Bromberg, University of Toronto, Canada http://www.sym454.org/twilight/ Civil Twilight Duration (sunset to solar depression 6°) at the Prime Meridian, Sea Level, Southern Hemisphere (March 1, 2007 to March 31, 2008) Mar 1 Mar 15 Mar 29 Apr 12 Apr 26 May 10 May 24 7 Jun 21 Jun Jul 5 Jul 19 Aug 2 Aug 16 Aug 30 Sep 13 Sep 27 11 Oct 25 Oct Nov 8 Nov 22 Dec 6 Dec 20 Jan 3 Jan 17 Jan 31 14 Feb 28 Feb Mar 13 Mar 27 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 23.5° S 30° S Civil Twilight Duration (daytime temporal minutes after sunset) after minutes temporal (daytime Duration Civil Twilight 100 40° S 45° S 50° S 55° S 105 58° S 59° S 110 60° S 61° S Northward Equinox North Solstice 115 Southward Equinox South Solstice 120 Analysis by Dr. -

Paper 2017026
IMMC2017026 Page 1 of 18 (+4) From Eliminating Irrelevant Factors to Determining the Meeting Venue—A Computational Approach —“I’m feeling tired.” ※ Abstract International meetings are increasingly common in business and academic communities due to globalisation and the demand of cooperation in all kinds of industries. Therefore, a problem of paramount importance is to decide the host city for such meetings. The organiser of these international meetings may first receive the list of all attendees and where they are from and then choose the optimal host city in consideration of the productivity in the meeting. To study the effect of different factors to the productivity of attendees from different countries, we can first refer to the result of the International Olympiad in Informatics (IOI) as its nature is similar to the meeting mentioned above, and each contestant has already been assigned a score. We calculate the difference of a country’s relative ranking and its average relative ranking in the three most recent years to isolate the effect of factors that varies each year from those that have a permanent effect. We then forcibly do linear regression on this measure of performance against different factors, including time zone difference, temperature difference, sunshine duration difference, flight distance, and elevation difference between a contestant’s home city and the host city. Student’s t-test then show that we have no evidence to reject the null hypothesis that the regressions of productivity against temperature difference, sunshine duration difference and elevation difference each has zero slope. Then we focus on minimising the total time difference between contestants’ home cities and the host city, and also minimising the flight distance in order to lower the cost with the premise that we do not violate the former constraint. -
A Modern Approach to Sundial Design
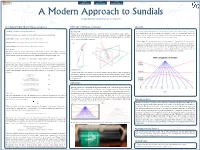
SARENA ANISSA DR. JASON ROBERTSON ZACHARIAS AUFDENBERG A Modern Approach to Sundials DEPARTMENT OF PHYSICAL SCIENCES INTRODUCTION TO VERTICAL SUNDIALS TYPES OF VERTICAL SUNDIALS RESULTS Gnomon: casts the shadow onto the sundial face Reclining Dials A small scale sundial model printed out and proved to be correct as far as the hour lines go, and only a Reclining dials are generally oriented along a north-south line, for example they face due south for a minor adjustment to the gnomon length was necessary in order for the declination lines to be Nodus: the location along the gnomon that marks the time and date on the dial plate sundial in the Northern hemisphere. In such a case the dial surface would have no declination. Reclining validated. This was possible since initial calibration fell on a date near the vernal equinox, therefore the sundials are at an angle from the vertical, and have gnomons directly parallel with Earth’s rotational axis tip of the shadow should have fell just below the equinox declination line. angular distance of the gnomon from the dial face Style Height: which is visually represented in Figure 1a). Shown in Figure 3 is the final sundial corrected for the longitude of Daytona Beach, FL. If the dial were Substyle Line: line lying in the dial plane perpendicularly behind the style 1b) 1a) not corrected for longitude, the noon line would fall directly vertical from the gnomon base. For verti- cal dials, the shortest shadow will be will the sun has its lowest altitude in the sky. For the Northern Substyle Angle: angle that the substyle makes with the noon-line hemisphere, this is the Winter Solstice declination line. -

ECEF) Coordinate System
2458-6 Workshop on GNSS Data Application to Low Latitude Ionospheric Research 6 - 17 May 2013 Fundamentals of Satellite Navigation HEGARTY Christopher The MITRE Corporation 202 Burlington Rd. / Rte 62 Bedford MA 01730-1420 U.S.A. Fundamentals of Satellite Navigation Chris Hegarty May 2013 1 © 2013 The MITRE Corporation. All rights reserved. Chris Hegarty The MITRE Corporation [email protected] 781-271-2127 (Tel) The contents of this material reflect the views of the author. Neither the Federal Aviation Administration nor the Department of the Transportation makes any warranty or guarantee, or promise, expressed or implied, concerning the content or accuracy of the views expressed herein. 2 Fundamentals of Satellite Navigation ■ Geodesy ■ Time and clocks ■ Satellite orbits ■ Positioning 3 © 2013 The MITRE Corporation. All rights reserved. Earth Centered Inertial (ECI) Coordinate System • Oblateness of the Earth causes direction of axes to move over time • So that coordinate system is truly “inertial” (fixed with respect to stars), it is necessary to fix coordinates • J2000 system fixes coordinates at 11:58:55.816 hours UTC on January 1, 2000 4 © 2013 The MITRE Corporation. All rights reserved. Precession and Nutation Vega Polaris 1.Rotation axis 2. In ~13,000 (now pointing yrs, rotation near Polaris) axis will point near Vega 3. In ~26,000 yrs, back to Earth Polaris •Precession is the large (23.5 deg half-angle) periodic motion •Nutation is a superimposed oscillation (~9 arcsec max) 5 © 2013 The MITRE Corporation. All rights reserved. Earth Centered Earth Fixed (ECEF) Coordinate System Notes: (1) By convention, the z-axis is the mean location of the north pole (spin axis of Earth) for 1900 – 1905, (2) the x-axis passes through 0º longitude, (3) the Earth’s crust moves slowly with respect to this coordinate system! 6 © 2013 The MITRE Corporation. -

2. Orbital Mechanics MAE 342 2016
2/12/20 Orbital Mechanics Space System Design, MAE 342, Princeton University Robert Stengel Conic section orbits Equations of motion Momentum and energy Kepler’s Equation Position and velocity in orbit Copyright 2016 by Robert Stengel. All rights reserved. For educational use only. http://www.princeton.edu/~stengel/MAE342.html 1 1 Orbits 101 Satellites Escape and Capture (Comets, Meteorites) 2 2 1 2/12/20 Two-Body Orbits are Conic Sections 3 3 Classical Orbital Elements Dimension and Time a : Semi-major axis e : Eccentricity t p : Time of perigee passage Orientation Ω :Longitude of the Ascending/Descending Node i : Inclination of the Orbital Plane ω: Argument of Perigee 4 4 2 2/12/20 Orientation of an Elliptical Orbit First Point of Aries 5 5 Orbits 102 (2-Body Problem) • e.g., – Sun and Earth or – Earth and Moon or – Earth and Satellite • Circular orbit: radius and velocity are constant • Low Earth orbit: 17,000 mph = 24,000 ft/s = 7.3 km/s • Super-circular velocities – Earth to Moon: 24,550 mph = 36,000 ft/s = 11.1 km/s – Escape: 25,000 mph = 36,600 ft/s = 11.3 km/s • Near escape velocity, small changes have huge influence on apogee 6 6 3 2/12/20 Newton’s 2nd Law § Particle of fixed mass (also called a point mass) acted upon by a force changes velocity with § acceleration proportional to and in direction of force § Inertial reference frame § Ratio of force to acceleration is the mass of the particle: F = m a d dv(t) ⎣⎡mv(t)⎦⎤ = m = ma(t) = F ⎡ ⎤ dt dt vx (t) ⎡ f ⎤ ⎢ ⎥ x ⎡ ⎤ d ⎢ ⎥ fx f ⎢ ⎥ m ⎢ vy (t) ⎥ = ⎢ y ⎥ F = fy = force vector dt -

Signal in Space Error and Ephemeris Validity Time Evaluation of Milena and Doresa Galileo Satellites †
sensors Article Signal in Space Error and Ephemeris Validity Time Evaluation of Milena and Doresa Galileo Satellites † Umberto Robustelli * , Guido Benassai and Giovanni Pugliano Department of Engineering, Parthenope University of Naples, 80143 Napoli, Italy; [email protected] (G.B.); [email protected] (G.P.) * Correspondence: [email protected] † This paper is an extended version of our paper published in the 2018 IEEE International Workshop on Metrology for the Sea proceedings entitled “Accuracy evaluation of Doresa and Milena Galileo satellites broadcast ephemeris”. Received: 14 March 2019; Accepted: 11 April 2019; Published: 14 April 2019 Abstract: In August 2016, Milena (E14) and Doresa (E18) satellites started to broadcast ephemeris in navigation message for testing purposes. If these satellites could be used, an improvement in the position accuracy would be achieved. A small error in the ephemeris would impact the accuracy of positioning up to ±2.5 m, thus orbit error must be assessed. The ephemeris quality was evaluated by calculating the SISEorbit (in orbit Signal In Space Error) using six different ephemeris validity time thresholds (14,400 s, 10,800 s, 7200 s, 3600 s, 1800 s, and 900 s). Two different periods of 2018 were analyzed by using IGS products: DOYs 52–71 and DOYs 172–191. For the first period, two different types of ephemeris were used: those received in IGS YEL2 station and the BRDM ones. Milena (E14) and Doresa (E18) satellites show a higher SISEorbit than the others. If validity time is reduced, the SISEorbit RMS of Milena (E14) and Doresa (E18) greatly decreases differently from the other satellites, for which the improvement, although present, is small.