5 Transformation Between the International Terrestrial Refer
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
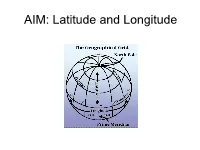
AIM: Latitude and Longitude
AIM: Latitude and Longitude Latitude lines run east/west but they measure north or south of the equator (0°) splitting the earth into the Northern Hemisphere and Southern Hemisphere. Latitude North Pole 90 80 Lines of 70 60 latitude are 50 numbered 40 30 from 0° at 20 Lines of [ 10 the equator latitude are 10 to 90° N.L. 20 numbered 30 at the North from 0° at 40 Pole. 50 the equator ] 60 to 90° S.L. 70 80 at the 90 South Pole. South Pole Latitude The North Pole is at 90° N 40° N is the 40° The equator is at 0° line of latitude north of the latitude. It is neither equator. north nor south. It is at the center 40° S is the 40° between line of latitude north and The South Pole is at 90° S south of the south. equator. Longitude Lines of longitude begin at the Prime Meridian. 60° W is the 60° E is the 60° line of 60° line of longitude west longitude of the Prime east of the W E Prime Meridian. Meridian. The Prime Meridian is located at 0°. It is neither east or west 180° N Longitude West Longitude West East Longitude North Pole W E PRIME MERIDIAN S Lines of longitude are numbered east from the Prime Meridian to the 180° line and west from the Prime Meridian to the 180° line. Prime Meridian The Prime Meridian (0°) and the 180° line split the earth into the Western Hemisphere and Eastern Hemisphere. Prime Meridian Western Eastern Hemisphere Hemisphere Places located east of the Prime Meridian have an east longitude (E) address. -

Equatorial and Cartesian Coordinates • Consider the Unit Sphere (“Unit”: I.E
Coordinate Transforms Equatorial and Cartesian Coordinates • Consider the unit sphere (“unit”: i.e. declination the distance from the center of the (δ) sphere to its surface is r = 1) • Then the equatorial coordinates Equator can be transformed into Cartesian coordinates: right ascension (α) – x = cos(α) cos(δ) – y = sin(α) cos(δ) z x – z = sin(δ) y • It can be much easier to use Cartesian coordinates for some manipulations of geometry in the sky Equatorial and Cartesian Coordinates • Consider the unit sphere (“unit”: i.e. the distance y x = Rcosα from the center of the y = Rsinα α R sphere to its surface is r = 1) x Right • Then the equatorial Ascension (α) coordinates can be transformed into Cartesian coordinates: declination (δ) – x = cos(α)cos(δ) z r = 1 – y = sin(α)cos(δ) δ R = rcosδ R – z = sin(δ) z = rsinδ Precession • Because the Earth is not a perfect sphere, it wobbles as it spins around its axis • This effect is known as precession • The equatorial coordinate system relies on the idea that the Earth rotates such that only Right Ascension, and not declination, is a time-dependent coordinate The effects of Precession • Currently, the star Polaris is the North Star (it lies roughly above the Earth’s North Pole at δ = 90oN) • But, over the course of about 26,000 years a variety of different points in the sky will truly be at δ = 90oN • The declination coordinate is time-dependent albeit on very long timescales • A precise astronomical coordinate system must account for this effect Equatorial coordinates and equinoxes • To account -

Prime Meridian ×
This website would like to remind you: Your browser (Apple Safari 4) is out of date. Update your browser for more × security, comfort and the best experience on this site. Encyclopedic Entry prime meridian For the complete encyclopedic entry with media resources, visit: http://education.nationalgeographic.com/encyclopedia/prime-meridian/ The prime meridian is the line of 0 longitude, the starting point for measuring distance both east and west around the Earth. The prime meridian is arbitrary, meaning it could be chosen to be anywhere. Any line of longitude (a meridian) can serve as the 0 longitude line. However, there is an international agreement that the meridian that runs through Greenwich, England, is considered the official prime meridian. Governments did not always agree that the Greenwich meridian was the prime meridian, making navigation over long distances very difficult. Different countries published maps and charts with longitude based on the meridian passing through their capital city. France would publish maps with 0 longitude running through Paris. Cartographers in China would publish maps with 0 longitude running through Beijing. Even different parts of the same country published materials based on local meridians. Finally, at an international convention called by U.S. President Chester Arthur in 1884, representatives from 25 countries agreed to pick a single, standard meridian. They chose the meridian passing through the Royal Observatory in Greenwich, England. The Greenwich Meridian became the international standard for the prime meridian. UTC The prime meridian also sets Coordinated Universal Time (UTC). UTC never changes for daylight savings or anything else. Just as the prime meridian is the standard for longitude, UTC is the standard for time. -

Civil Twilight Duration (Sunset to Solar Depression
Civil Twilight Duration (sunset to solar depression 6°) at the Prime Meridian, Sea Level, Northern Hemisphere (March 1, 2007 to March 31, 2008) Mar 1 Mar 15 Mar 29 Apr 12 Apr 26 May 10 May 24 7 Jun 21 Jun Jul 5 Jul 19 Aug 2 Aug 16 Aug 30 Sep 13 Sep 27 11 Oct 25 Oct Nov 8 Nov 22 Dec 6 Dec 20 Jan 3 Jan 17 Jan 31 14 Feb 28 Feb Mar 13 Mar 27 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 Civil Twilight Duration (daytime temporal minutes after sunset) after minutes temporal (daytime Duration Civil Twilight 23.5° N 30° N 100 40° N 45° N 105 50° N 55° N 58° N 59° N 110 60° N 61° N Northward Equinox North Solstice 115 Southward Equinox South Solstice 120 Analysis by Dr. Irv Bromberg, University of Toronto, Canada http://www.sym454.org/twilight/ Civil Twilight Duration (sunset to solar depression 6°) at the Prime Meridian, Sea Level, Southern Hemisphere (March 1, 2007 to March 31, 2008) Mar 1 Mar 15 Mar 29 Apr 12 Apr 26 May 10 May 24 7 Jun 21 Jun Jul 5 Jul 19 Aug 2 Aug 16 Aug 30 Sep 13 Sep 27 11 Oct 25 Oct Nov 8 Nov 22 Dec 6 Dec 20 Jan 3 Jan 17 Jan 31 14 Feb 28 Feb Mar 13 Mar 27 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 23.5° S 30° S Civil Twilight Duration (daytime temporal minutes after sunset) after minutes temporal (daytime Duration Civil Twilight 100 40° S 45° S 50° S 55° S 105 58° S 59° S 110 60° S 61° S Northward Equinox North Solstice 115 Southward Equinox South Solstice 120 Analysis by Dr. -

3.- the Geographic Position of a Celestial Body
Chapter 3 Copyright © 1997-2004 Henning Umland All Rights Reserved Geographic Position and Time Geographic terms In celestial navigation, the earth is regarded as a sphere. Although this is an approximation, the geometry of the sphere is applied successfully, and the errors caused by the flattening of the earth are usually negligible (chapter 9). A circle on the surface of the earth whose plane passes through the center of the earth is called a great circle . Thus, a great circle has the greatest possible diameter of all circles on the surface of the earth. Any circle on the surface of the earth whose plane does not pass through the earth's center is called a small circle . The equator is the only great circle whose plane is perpendicular to the polar axis , the axis of rotation. Further, the equator is the only parallel of latitude being a great circle. Any other parallel of latitude is a small circle whose plane is parallel to the plane of the equator. A meridian is a great circle going through the geographic poles , the points where the polar axis intersects the earth's surface. The upper branch of a meridian is the half from pole to pole passing through a given point, e. g., the observer's position. The lower branch is the opposite half. The Greenwich meridian , the meridian passing through the center of the transit instrument at the Royal Greenwich Observatory , was adopted as the prime meridian at the International Meridian Conference in 1884. Its upper branch is the reference for measuring longitudes (0°...+180° east and 0°...–180° west), its lower branch (180°) is the basis for the International Dateline (Fig. -

Coordinates James R
Coordinates James R. Clynch Naval Postgraduate School, 2002 I. Coordinate Types There are two generic types of coordinates: Cartesian, and Curvilinear of Angular. Those that provide x-y-z type values in meters, kilometers or other distance units are called Cartesian. Those that provide latitude, longitude, and height are called curvilinear or angular. The Cartesian and angular coordinates are equivalent, but only after supplying some extra information. For the spherical earth model only the earth radius is needed. For the ellipsoidal earth, two parameters of the ellipsoid are needed. (These can be any of several sets. The most common is the semi-major axis, called "a", and the flattening, called "f".) II. Cartesian Coordinates A. Generic Cartesian Coordinates These are the coordinates that are used in algebra to plot functions. For a two dimensional system there are two axes, which are perpendicular to each other. The value of a point is represented by the values of the point projected onto the axes. In the figure below the point (5,2) and the standard orientation for the X and Y axes are shown. In three dimensions the same process is used. In this case there are three axis. There is some ambiguity to the orientation of the Z axis once the X and Y axes have been drawn. There 1 are two choices, leading to right and left handed systems. The standard choice, a right hand system is shown below. Rotating a standard (right hand) screw from X into Y advances along the positive Z axis. The point Q at ( -5, -5, 10) is shown. -

Paper 2017026
IMMC2017026 Page 1 of 18 (+4) From Eliminating Irrelevant Factors to Determining the Meeting Venue—A Computational Approach —“I’m feeling tired.” ※ Abstract International meetings are increasingly common in business and academic communities due to globalisation and the demand of cooperation in all kinds of industries. Therefore, a problem of paramount importance is to decide the host city for such meetings. The organiser of these international meetings may first receive the list of all attendees and where they are from and then choose the optimal host city in consideration of the productivity in the meeting. To study the effect of different factors to the productivity of attendees from different countries, we can first refer to the result of the International Olympiad in Informatics (IOI) as its nature is similar to the meeting mentioned above, and each contestant has already been assigned a score. We calculate the difference of a country’s relative ranking and its average relative ranking in the three most recent years to isolate the effect of factors that varies each year from those that have a permanent effect. We then forcibly do linear regression on this measure of performance against different factors, including time zone difference, temperature difference, sunshine duration difference, flight distance, and elevation difference between a contestant’s home city and the host city. Student’s t-test then show that we have no evidence to reject the null hypothesis that the regressions of productivity against temperature difference, sunshine duration difference and elevation difference each has zero slope. Then we focus on minimising the total time difference between contestants’ home cities and the host city, and also minimising the flight distance in order to lower the cost with the premise that we do not violate the former constraint. -

1 the Equatorial Coordinate System
General Astronomy (29:61) Fall 2013 Lecture 3 Notes , August 30, 2013 1 The Equatorial Coordinate System We can define a coordinate system fixed with respect to the stars. Just like we can specify the latitude and longitude of a place on Earth, we can specify the coordinates of a star relative to a coordinate system fixed with respect to the stars. Look at Figure 1.5 of the textbook for a definition of this coordinate system. The Equatorial Coordinate System is similar in concept to longitude and latitude. • Right Ascension ! longitude. The symbol for Right Ascension is α. The units of Right Ascension are hours, minutes, and seconds, just like time • Declination ! latitude. The symbol for Declination is δ. Declination = 0◦ cor- responds to the Celestial Equator, δ = 90◦ corresponds to the North Celestial Pole. Let's look at the Equatorial Coordinates of some objects you should have seen last night. • Arcturus: RA= 14h16m, Dec= +19◦110 (see Appendix A) • Vega: RA= 18h37m, Dec= +38◦470 (see Appendix A) • Venus: RA= 13h02m, Dec= −6◦370 • Saturn: RA= 14h21m, Dec= −11◦410 −! Hand out SC1 charts. Find these objects on them. Now find the constellation of Orion, and read off the Right Ascension and Decli- nation of the middle star in the belt. Next week in lab, you will have the chance to use the computer program Stellar- ium to display the sky and find coordinates of objects (stars, planets). 1.1 Further Remarks on the Equatorial Coordinate System The Equatorial Coordinate System is fundamentally established by the rotation axis of the Earth. -

2 Coordinate Systems
2 Coordinate systems In order to find something one needs a system of coordinates. For determining the positions of the stars and planets where the distance to the object often is unknown it usually suffices to use two coordinates. On the other hand, since the Earth rotates around it’s own axis as well as around the Sun the positions of stars and planets is continually changing, and the measurment of when an object is in a certain place is as important as deciding where it is. Our first task is to decide on a coordinate system and the position of 1. The origin. E.g. one’s own location, the center of the Earth, the, the center of the Solar System, the Galaxy, etc. 2. The fundamental plan (x−y plane). This is often a plane of some physical significance such as the horizon, the equator, or the ecliptic. 3. Decide on the direction of the positive x-axis, also known as the “reference direction”. 4. And, finally, on a convention of signs of the y− and z− axes, i.e whether to use a left-handed or right-handed coordinate system. For example Eratosthenes of Cyrene (c. 276 BC c. 195 BC) was a Greek mathematician, elegiac poet, athlete, geographer, astronomer, and music theo- rist who invented a system of latitude and longitude. (According to Wikipedia he was also the first person to use the word geography and invented the disci- pline of geography as we understand it.). The origin of this coordinate system was the center of the Earth and the fundamental plane was the equator, which location Eratosthenes calculated relative to the parts of the Earth known to him. -

Celestial Coordinate Systems
Celestial Coordinate Systems Craig Lage Department of Physics, New York University, [email protected] January 6, 2014 1 Introduction This document reviews briefly some of the key ideas that you will need to understand in order to identify and locate objects in the sky. It is intended to serve as a reference document. 2 Angular Basics When we view objects in the sky, distance is difficult to determine, and generally we can only indicate their direction. For this reason, angles are critical in astronomy, and we use angular measures to locate objects and define the distance between objects. Angles are measured in a number of different ways in astronomy, and you need to become familiar with the different notations and comfortable converting between them. A basic angle is shown in Figure 1. θ Figure 1: A basic angle, θ. We review some angle basics. We normally use two primary measures of angles, degrees and radians. In astronomy, we also sometimes use time as a measure of angles, as we will discuss later. A radian is a dimensionless measure equal to the length of the circular arc enclosed by the angle divided by the radius of the circle. A full circle is thus equal to 2π radians. A degree is an arbitrary measure, where a full circle is defined to be equal to 360◦. When using degrees, we also have two different conventions, to divide one degree into decimal degrees, or alternatively to divide it into 60 minutes, each of which is divided into 60 seconds. These are also referred to as minutes of arc or seconds of arc so as not to confuse them with minutes of time and seconds of time. -
Positional Astronomy Coordinate Systems
Positional Astronomy Observational Astronomy 2019 Part 2 Prof. S.C. Trager Coordinate systems We need to know where the astronomical objects we want to study are located in order to study them! We need a system (well, many systems!) to describe the positions of astronomical objects. The Celestial Sphere First we need the concept of the celestial sphere. It would be nice if we knew the distance to every object we’re interested in — but we don’t. And it’s actually unnecessary in order to observe them! The Celestial Sphere Instead, we assume that all astronomical sources are infinitely far away and live on the surface of a sphere at infinite distance. This is the celestial sphere. If we define a coordinate system on this sphere, we know where to point! Furthermore, stars (and galaxies) move with respect to each other. The motion normal to the line of sight — i.e., on the celestial sphere — is called proper motion (which we’ll return to shortly) Astronomical coordinate systems A bit of terminology: great circle: a circle on the surface of a sphere intercepting a plane that intersects the origin of the sphere i.e., any circle on the surface of a sphere that divides that sphere into two equal hemispheres Horizon coordinates A natural coordinate system for an Earth- bound observer is the “horizon” or “Alt-Az” coordinate system The great circle of the horizon projected on the celestial sphere is the equator of this system. Horizon coordinates Altitude (or elevation) is the angle from the horizon up to our object — the zenith, the point directly above the observer, is at +90º Horizon coordinates We need another coordinate: define a great circle perpendicular to the equator (horizon) passing through the zenith and, for convenience, due north This line of constant longitude is called a meridian Horizon coordinates The azimuth is the angle measured along the horizon from north towards east to the great circle that intercepts our object (star) and the zenith. -

Exercise 1.0 the CELESTIAL EQUATORIAL COORDINATE
Exercise 1.0 THE CELESTIAL EQUATORIAL COORDINATE SYSTEM Equipment needed: A celestial globe showing positions of bright stars. I. Introduction There are several different ways of representing the appearance of the sky or describing the locations of objects we see in the sky. One way is to imagine that every object in the sky is located on a very large and distant sphere called the celestial sphere . This imaginary sphere has its center at the center of the Earth. Since the radius of the Earth is very small compared to the radius of the celestial sphere, we can imagine that this sphere is also centered on any person or observer standing on the Earth's surface. Every celestial object (e.g., a star or planet) has a definite location in the sky with respect to some arbitrary reference point. Once defined, such a reference point can be used as the origin of a celestial coordinate system. There is an astronomically important point in the sky called the vernal equinox , which astronomers use as the origin of such a celestial coordinate system . The meaning and significance of the vernal equinox will be discussed later. In an analogous way, we represent the surface of the Earth by a globe or sphere. Locations on the geographic sphere are specified by the coordinates called longitude and latitude . The origin for this geographic coordinate system is the point where the Prime Meridian and the Geographic Equator intersect. This is a point located off the coast of west-central Africa. To specify a location on a sphere, the coordinates must be angles, since a sphere has a curved surface.