Magnetic Coordinate Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Navigation and the Global Positioning System (GPS): the Global Positioning System
Navigation and the Global Positioning System (GPS): The Global Positioning System: Few changes of great importance to economics and safety have had more immediate impact and less fanfare than GPS. • GPS has quietly changed everything about how we locate objects and people on the Earth. • GPS is (almost) the final step toward solving one of the great conundrums of human history. Where the heck are we, anyway? In the Beginning……. • To understand what GPS has meant to navigation it is necessary to go back to the beginning. • A quick look at a ‘precision’ map of the world in the 18th century tells one a lot about how accurate our navigation was. Tools of the Trade: • Navigations early tools could only crudely estimate location. • A Sextant (or equivalent) can measure the elevation of something above the horizon. This gives your Latitude. • The Compass could provide you with a measurement of your direction, which combined with distance could tell you Longitude. • For distance…well counting steps (or wheel rotations) was the thing. An Early Triumph: • Using just his feet and a shadow, Eratosthenes determined the diameter of the Earth. • In doing so, he used the last and most elusive of our navigational tools. Time Plenty of Weaknesses: The early tools had many levels of uncertainty that were cumulative in producing poor maps of the world. • Step or wheel rotation counting has an obvious built-in uncertainty. • The Sextant gives latitude, but also requires knowledge of the Earth’s radius to determine the distance between locations. • The compass relies on the assumption that the North Magnetic pole is coincident with North Rotational pole (it’s not!) and that it is a perfect dipole (nope…). -
Doc.10100.Space Weather Manual FINAL DRAFT Version
Doc 10100 Manual on Space Weather Information in Support of International Air Navigation Approved by the Secretary General and published under his authority First Edition – 2018 International Civil Aviation Organization TABLE OF CONTENTS Page Chapter 1. Introduction ..................................................................................................................................... 1-1 1.1 General ............................................................................................................................................... 1-1 1.2 Space weather indicators .................................................................................................................... 1-1 1.3 The hazards ........................................................................................................................................ 1-2 1.4 Space weather mitigation aspects ....................................................................................................... 1-3 1.5 Coordinating the response to a space weather event ......................................................................... 1-3 Chapter 2. Space Weather Phenomena and Aviation Operations ................................................................. 2-1 2.1 General ............................................................................................................................................... 2-1 2.2 Geomagnetic storms .......................................................................................................................... -
QUICK REFERENCE GUIDE Latitude, Longitude and Associated Metadata
QUICK REFERENCE GUIDE Latitude, Longitude and Associated Metadata The Property Profile Form (PPF) requests the property name, address, city, state and zip. From these address fields, ACRES interfaces with Google Maps and extracts the latitude and longitude (lat/long) for the property location. ACRES sets the remaining property geographic information to default values. The data (known collectively as “metadata”) are required by EPA Data Standards. Should an ACRES user need to be update the metadata, the Edit Fields link on the PPF provides the ability to change the information. Before the metadata were populated by ACRES, the data were entered manually. There may still be the need to do so, for example some properties do not have a specific street address (e.g. a rural property located on a state highway) or an ACRES user may have an exact lat/long that is to be used. This Quick Reference Guide covers how to find latitude and longitude, define the metadata, fill out the associated fields in a Property Work Package, and convert latitude and longitude to decimal degree format. This explains how the metadata were determined prior to September 2011 (when the Google Maps interface was added to ACRES). Definitions Below are definitions of the six data elements for latitude and longitude data that are collected in a Property Work Package. The definitions below are based on text from the EPA Data Standard. Latitude: Is the measure of the angular distance on a meridian north or south of the equator. Latitudinal lines run horizontal around the earth in parallel concentric lines from the equator to each of the poles. -
AIM: Latitude and Longitude
AIM: Latitude and Longitude Latitude lines run east/west but they measure north or south of the equator (0°) splitting the earth into the Northern Hemisphere and Southern Hemisphere. Latitude North Pole 90 80 Lines of 70 60 latitude are 50 numbered 40 30 from 0° at 20 Lines of [ 10 the equator latitude are 10 to 90° N.L. 20 numbered 30 at the North from 0° at 40 Pole. 50 the equator ] 60 to 90° S.L. 70 80 at the 90 South Pole. South Pole Latitude The North Pole is at 90° N 40° N is the 40° The equator is at 0° line of latitude north of the latitude. It is neither equator. north nor south. It is at the center 40° S is the 40° between line of latitude north and The South Pole is at 90° S south of the south. equator. Longitude Lines of longitude begin at the Prime Meridian. 60° W is the 60° E is the 60° line of 60° line of longitude west longitude of the Prime east of the W E Prime Meridian. Meridian. The Prime Meridian is located at 0°. It is neither east or west 180° N Longitude West Longitude West East Longitude North Pole W E PRIME MERIDIAN S Lines of longitude are numbered east from the Prime Meridian to the 180° line and west from the Prime Meridian to the 180° line. Prime Meridian The Prime Meridian (0°) and the 180° line split the earth into the Western Hemisphere and Eastern Hemisphere. Prime Meridian Western Eastern Hemisphere Hemisphere Places located east of the Prime Meridian have an east longitude (E) address. -

Latitude/Longitude Data Standard
LATITUDE/LONGITUDE DATA STANDARD Standard No.: EX000017.2 January 6, 2006 Approved on January 6, 2006 by the Exchange Network Leadership Council for use on the Environmental Information Exchange Network Approved on January 6, 2006 by the Chief Information Officer of the U. S. Environmental Protection Agency for use within U.S. EPA This consensus standard was developed in collaboration by State, Tribal, and U. S. EPA representatives under the guidance of the Exchange Network Leadership Council and its predecessor organization, the Environmental Data Standards Council. Latitude/Longitude Data Standard Std No.:EX000017.2 Foreword The Environmental Data Standards Council (EDSC) identifies, prioritizes, and pursues the creation of data standards for those areas where information exchange standards will provide the most value in achieving environmental results. The Council involves Tribes and Tribal Nations, state and federal agencies in the development of the standards and then provides the draft materials for general review. Business groups, non- governmental organizations, and other interested parties may then provide input and comment for Council consideration and standard finalization. Standards are available at http://www.epa.gov/datastandards. 1.0 INTRODUCTION The Latitude/Longitude Data Standard is a set of data elements that can be used for recording horizontal and vertical coordinates and associated metadata that define a point on the earth. The latitude/longitude data standard establishes the requirements for documenting latitude and longitude coordinates and related method, accuracy, and description data for all places used in data exchange transaction. Places include facilities, sites, monitoring stations, observation points, and other regulated or tracked features. 1.1 Scope The purpose of the standard is to provide a common set of data elements to specify a point by latitude/longitude. -

Why Do We Use Latitude and Longitude? What Is the Equator?
Where in the World? This lesson teaches the concepts of latitude and longitude with relation to the globe. Grades: 4, 5, 6 Disciplines: Geography, Math Before starting the activity, make sure each student has access to a globe or a world map that contains latitude and longitude lines. Why Do We Use Latitude and Longitude? The Earth is divided into degrees of longitude and latitude which helps us measure location and time using a single standard. When used together, longitude and latitude define a specific location through geographical coordinates. These coordinates are what the Global Position System or GPS uses to provide an accurate locational relay. Longitude and latitude lines measure the distance from the Earth's Equator or central axis - running east to west - and the Prime Meridian in Greenwich, England - running north to south. What Is the Equator? The Equator is an imaginary line that runs around the center of the Earth from east to west. It is perpindicular to the Prime Meridan, the 0 degree line running from north to south that passes through Greenwich, England. There are equal distances from the Equator to the north pole, and also from the Equator to the south pole. The line uniformly divides the northern and southern hemispheres of the planet. Because of how the sun is situated above the Equator - it is primarily overhead - locations close to the Equator generally have high temperatures year round. In addition, they experience close to 12 hours of sunlight a day. Then, during the Autumn and Spring Equinoxes the sun is exactly overhead which results in 12-hour days and 12-hour nights. -
National Space Weather Program Implementation Plan, 2Nd Edition, July 2000
National Space Weather Program Implementation Plan, 2nd Edition, July 2000 http://www.ofcm.gov/ The National Space Weather Program The Implementation Plan 2nd Edition July 2000 National Space Weather Program Implementation Plan, 2nd Edition, July 2000 http://www.ofcm.gov/ NATIONAL SPACE WEATHER PROGRAM COUNCIL Mr. Samuel P. Williamson, Chairman Federal Coordinator Dr. David L. Evans Department of Commerce Colonel Michael A. Neyland, USAF Department of Defense Mr. Robert E. Waldron Department of Energy Mr. James F. Devine Department of the Interior Mr. David Whatley Department of Transportation Dr. Edward J. Weiler National Aeronautics and Space Administration Dr. Margaret S. Leinen National Science Foundation Lt Col Michael R. Babcock, USAF, Executive Secretary Office of the Federal Coordinator for Meteorological Services and Supporting Research National Space Weather Program Implementation Plan, 2nd Edition, July 2000 http://www.ofcm.gov/ NATIONAL SPACE WEATHER PROGRAM Implementation Plan 2nd Edition Prepared by the Committee for Space Weather for the National Space Weather Program Council Office of the Federal Coordinator for Meteorology FCM-P31-2000 Washington, DC July 2000 National Space Weather Program Implementation Plan, 2nd Edition, July 2000 http://www.ofcm.gov/ National Space Weather Program Implementation Plan, 2nd Edition, July 2000 http://www.ofcm.gov/ FOREWORD We are pleased to present this Second Edition of the National Space Weather Program Implementation Plan. We published the program's Strategic Plan in 1995 and the first Implementation Plan in 1997. In the intervening period, we have made tremendous progress toward our goals but much work remains to be accomplished to achieve our ultimate goal of providing the space weather observations, forecasts, and warnings needed by our Nation. -

Download/Pdf/Ps-Is-Qzss/Ps-Qzss-001.Pdf (Accessed on 15 June 2021)
remote sensing Article Design and Performance Analysis of BDS-3 Integrity Concept Cheng Liu 1, Yueling Cao 2, Gong Zhang 3, Weiguang Gao 1,*, Ying Chen 1, Jun Lu 1, Chonghua Liu 4, Haitao Zhao 4 and Fang Li 5 1 Beijing Institute of Tracking and Telecommunication Technology, Beijing 100094, China; [email protected] (C.L.); [email protected] (Y.C.); [email protected] (J.L.) 2 Shanghai Astronomical Observatory, Chinese Academy of Sciences, Shanghai 200030, China; [email protected] 3 Institute of Telecommunication and Navigation, CAST, Beijing 100094, China; [email protected] 4 Beijing Institute of Spacecraft System Engineering, Beijing 100094, China; [email protected] (C.L.); [email protected] (H.Z.) 5 National Astronomical Observatories, Chinese Academy of Sciences, Beijing 100094, China; [email protected] * Correspondence: [email protected] Abstract: Compared to the BeiDou regional navigation satellite system (BDS-2), the BeiDou global navigation satellite system (BDS-3) carried out a brand new integrity concept design and construction work, which defines and achieves the integrity functions for major civil open services (OS) signals such as B1C, B2a, and B1I. The integrity definition and calculation method of BDS-3 are introduced. The fault tree model for satellite signal-in-space (SIS) is used, to decompose and obtain the integrity risk bottom events. In response to the weakness in the space and ground segments of the system, a variety of integrity monitoring measures have been taken. On this basis, the design values for the new B1C/B2a signal and the original B1I signal are proposed, which are 0.9 × 10−5 and 0.8 × 10−5, respectively. -

Geodynamics and Rate of Volcanism on Massive Earth-Like Planets
The Astrophysical Journal, 700:1732–1749, 2009 August 1 doi:10.1088/0004-637X/700/2/1732 C 2009. The American Astronomical Society. All rights reserved. Printed in the U.S.A. GEODYNAMICS AND RATE OF VOLCANISM ON MASSIVE EARTH-LIKE PLANETS E. S. Kite1,3, M. Manga1,3, and E. Gaidos2 1 Department of Earth and Planetary Science, University of California at Berkeley, Berkeley, CA 94720, USA; [email protected] 2 Department of Geology and Geophysics, University of Hawaii at Manoa, Honolulu, HI 96822, USA Received 2008 September 12; accepted 2009 May 29; published 2009 July 16 ABSTRACT We provide estimates of volcanism versus time for planets with Earth-like composition and masses 0.25–25 M⊕, as a step toward predicting atmospheric mass on extrasolar rocky planets. Volcanism requires melting of the silicate mantle. We use a thermal evolution model, calibrated against Earth, in combination with standard melting models, to explore the dependence of convection-driven decompression mantle melting on planet mass. We show that (1) volcanism is likely to proceed on massive planets with plate tectonics over the main-sequence lifetime of the parent star; (2) crustal thickness (and melting rate normalized to planet mass) is weakly dependent on planet mass; (3) stagnant lid planets live fast (they have higher rates of melting than their plate tectonic counterparts early in their thermal evolution), but die young (melting shuts down after a few Gyr); (4) plate tectonics may not operate on high-mass planets because of the production of buoyant crust which is difficult to subduct; and (5) melting is necessary but insufficient for efficient volcanic degassing—volatiles partition into the earliest, deepest melts, which may be denser than the residue and sink to the base of the mantle on young, massive planets. -
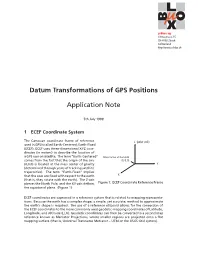
Datum Transformations of GPS Positions Application Note
µ-blox ag Gloriastrasse 35 CH-8092 Zürich Switzerland http://www.u-blox.ch Datum Transformations of GPS Positions Application Note 5th July 1999 1 ECEF Coordinate System The Cartesian coordinate frame of reference used in GPS is called Earth-Centered, Earth-Fixed (ECEF). ECEF uses three-dimensional XYZ coor- dinates (in meters) to describe the location of a GPS user or satellite. The term "Earth-Centered" comes from the fact that the origin of the axis (0,0,0) is located at the mass center of gravity (determined through years of tracking satellite trajectories). The term "Earth-Fixed" implies that the axes are fixed with respect to the earth (that is, they rotate with the earth). The Z-axis pierces the North Pole, and the XY-axis defines Figure 1: ECEF Coordinate Reference Frame the equatorial plane. (Figure 1) ECEF coordinates are expressed in a reference system that is related to mapping representa- tions. Because the earth has a complex shape, a simple, yet accurate, method to approximate the earth’s shape is required. The use of a reference ellipsoid allows for the conversion of the ECEF coordinates to the more commonly used geodetic-mapping coordinates of Latitude, Longitude, and Altitude (LLA). Geodetic coordinates can then be converted to a second map reference known as Mercator Projections, where smaller regions are projected onto a flat mapping surface (that is, Universal Transverse Mercator – UTM or the USGS Grid system). 2 2 CONVERSION BETWEEN ECEF AND LOCAL TANGENTIAL PLANE A reference ellipsoid can be described by a series of parameters that define its shape and b e which include a semi-major axis ( a), a semi-minor axis ( ) and its first eccentricity ( )andits 0 second eccentricity ( e ) as shown in Figure 2. -

Coordinates James R
Coordinates James R. Clynch Naval Postgraduate School, 2002 I. Coordinate Types There are two generic types of coordinates: Cartesian, and Curvilinear of Angular. Those that provide x-y-z type values in meters, kilometers or other distance units are called Cartesian. Those that provide latitude, longitude, and height are called curvilinear or angular. The Cartesian and angular coordinates are equivalent, but only after supplying some extra information. For the spherical earth model only the earth radius is needed. For the ellipsoidal earth, two parameters of the ellipsoid are needed. (These can be any of several sets. The most common is the semi-major axis, called "a", and the flattening, called "f".) II. Cartesian Coordinates A. Generic Cartesian Coordinates These are the coordinates that are used in algebra to plot functions. For a two dimensional system there are two axes, which are perpendicular to each other. The value of a point is represented by the values of the point projected onto the axes. In the figure below the point (5,2) and the standard orientation for the X and Y axes are shown. In three dimensions the same process is used. In this case there are three axis. There is some ambiguity to the orientation of the Z axis once the X and Y axes have been drawn. There 1 are two choices, leading to right and left handed systems. The standard choice, a right hand system is shown below. Rotating a standard (right hand) screw from X into Y advances along the positive Z axis. The point Q at ( -5, -5, 10) is shown. -
Spherical Coordinate Systems
Spherical Coordinate Systems Exploring Space Through Math Pre-Calculus let's examine the Earth in 3-dimensional space. The Earth is a large spherical object. In order to find a location on the surface, The Global Pos~ioning System grid is used. The Earth is conventionally broken up into 4 parts called hemispheres. The North and South hemispheres are separated by the equator. The East and West hemispheres are separated by the Prime Meridian. The Geographic Coordinate System grid utilizes a series of horizontal and vertical lines. The horizontal lines are called latitude lines. The equator is the center line of latitude. Each line is measured in degrees to the North or South of the equator. Since there are 360 degrees in a circle, each hemisphere is 180 degrees. The vertical lines are called longitude lines. The Prime Meridian is the center line of longitude. Each hemisphere either East or West from the center line is 180 degrees. These lines form a grid or mapping system for the surface of the Earth, This is how latitude and longitude lines are represented on a flat map called a Mercator Projection. Lat~ude , l ong~ude , and elevalion allows us to uniquely identify a location on Earth but, how do we identify the pos~ion of another point or object above Earth's surface relative to that I? NASA uses a spherical Coordinate system called the Topodetic coordinate system. Consider the position of the space shuttle . The first variable used for position is called the azimuth. Azimuth is the horizontal angle Az of the location on the Earth, measured clockwise from a - line pointing due north.