Computing GPS Satellite Velocity and Acceleration from the Broadcast
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Analysis of Perturbations and Station-Keeping Requirements in Highly-Inclined Geosynchronous Orbits
ANALYSIS OF PERTURBATIONS AND STATION-KEEPING REQUIREMENTS IN HIGHLY-INCLINED GEOSYNCHRONOUS ORBITS Elena Fantino(1), Roberto Flores(2), Alessio Di Salvo(3), and Marilena Di Carlo(4) (1)Space Studies Institute of Catalonia (IEEC), Polytechnic University of Catalonia (UPC), E.T.S.E.I.A.T., Colom 11, 08222 Terrassa (Spain), [email protected] (2)International Center for Numerical Methods in Engineering (CIMNE), Polytechnic University of Catalonia (UPC), Building C1, Campus Norte, UPC, Gran Capitan,´ s/n, 08034 Barcelona (Spain) (3)NEXT Ingegneria dei Sistemi S.p.A., Space Innovation System Unit, Via A. Noale 345/b, 00155 Roma (Italy), [email protected] (4)Department of Mechanical and Aerospace Engineering, University of Strathclyde, 75 Montrose Street, Glasgow G1 1XJ (United Kingdom), [email protected] Abstract: There is a demand for communications services at high latitudes that is not well served by conventional geostationary satellites. Alternatives using low-altitude orbits require too large constellations. Other options are the Molniya and Tundra families (critically-inclined, eccentric orbits with the apogee at high latitudes). In this work we have considered derivatives of the Tundra type with different inclinations and eccentricities. By means of a high-precision model of the terrestrial gravity field and the most relevant environmental perturbations, we have studied the evolution of these orbits during a period of two years. The effects of the different perturbations on the constellation ground track (which is more important for coverage than the orbital elements themselves) have been identified. We show that, in order to maintain the ground track unchanged, the most important parameters are the orbital period and the argument of the perigee. -

Appendix a Orbits
Appendix A Orbits As discussed in the Introduction, a good ¯rst approximation for satellite motion is obtained by assuming the spacecraft is a point mass or spherical body moving in the gravitational ¯eld of a spherical planet. This leads to the classical two-body problem. Since we use the term body to refer to a spacecraft of ¯nite size (as in rigid body), it may be more appropriate to call this the two-particle problem, but I will use the term two-body problem in its classical sense. The basic elements of orbital dynamics are captured in Kepler's three laws which he published in the 17th century. His laws were for the orbital motion of the planets about the Sun, but are also applicable to the motion of satellites about planets. The three laws are: 1. The orbit of each planet is an ellipse with the Sun at one focus. 2. The line joining the planet to the Sun sweeps out equal areas in equal times. 3. The square of the period of a planet is proportional to the cube of its mean distance to the sun. The ¯rst law applies to most spacecraft, but it is also possible for spacecraft to travel in parabolic and hyperbolic orbits, in which case the period is in¯nite and the 3rd law does not apply. However, the 2nd law applies to all two-body motion. Newton's 2nd law and his law of universal gravitation provide the tools for generalizing Kepler's laws to non-elliptical orbits, as well as for proving Kepler's laws. -

Astrodynamics
Politecnico di Torino SEEDS SpacE Exploration and Development Systems Astrodynamics II Edition 2006 - 07 - Ver. 2.0.1 Author: Guido Colasurdo Dipartimento di Energetica Teacher: Giulio Avanzini Dipartimento di Ingegneria Aeronautica e Spaziale e-mail: [email protected] Contents 1 Two–Body Orbital Mechanics 1 1.1 BirthofAstrodynamics: Kepler’sLaws. ......... 1 1.2 Newton’sLawsofMotion ............................ ... 2 1.3 Newton’s Law of Universal Gravitation . ......... 3 1.4 The n–BodyProblem ................................. 4 1.5 Equation of Motion in the Two-Body Problem . ....... 5 1.6 PotentialEnergy ................................. ... 6 1.7 ConstantsoftheMotion . .. .. .. .. .. .. .. .. .... 7 1.8 TrajectoryEquation .............................. .... 8 1.9 ConicSections ................................... 8 1.10 Relating Energy and Semi-major Axis . ........ 9 2 Two-Dimensional Analysis of Motion 11 2.1 ReferenceFrames................................. 11 2.2 Velocity and acceleration components . ......... 12 2.3 First-Order Scalar Equations of Motion . ......... 12 2.4 PerifocalReferenceFrame . ...... 13 2.5 FlightPathAngle ................................. 14 2.6 EllipticalOrbits................................ ..... 15 2.6.1 Geometry of an Elliptical Orbit . ..... 15 2.6.2 Period of an Elliptical Orbit . ..... 16 2.7 Time–of–Flight on the Elliptical Orbit . .......... 16 2.8 Extensiontohyperbolaandparabola. ........ 18 2.9 Circular and Escape Velocity, Hyperbolic Excess Speed . .............. 18 2.10 CosmicVelocities -

Stage 1: the Number Sequence
1 stage 1: the number sequence Big Idea: Quantity Quantity is the big idea that describes amounts, or sizes. It is a fundamental idea that refers to quantitative properties; the size of things (magnitude), and the number of things (multitude). Why is Quantity Important? Quantity means that numbers represent amounts. If students do not possess an understanding of Quantity, their knowledge of foundational mathematics will be undermined. Understanding Quantity helps students develop number conceptualization. In or- der for children to understand quantity, they need foundational experiences with counting, identifying numbers, sequencing, and comparing. Counting, and using numerals to quantify collections, form the developmental progression of experiences in Stage 1. Children who understand number concepts know that numbers are used to describe quantities and relationships’ between quantities. For example, the sequence of numbers is determined by each number’s magnitude, a concept that not all children understand. Without this underpinning of understanding, a child may perform rote responses, which will not stand the test of further, rigorous application. The developmental progression of experiences in Stage 1 help students actively grow a strong number knowledge base. Stage 1 Learning Progression Concept Standard Example Description Children complete short sequences of visual displays of quantities beginning with 1. Subsequently, the sequence shows gaps which the students need to fill in. The sequencing 1.1: Sequencing K.CC.2 1, 2, 3, 4, ? tasks ask students to show that they have quantity and number names in order of magnitude and to associate quantities with numerals. 1.2: Identifying Find the Students see the visual tool with a numeral beneath it. -

Using Concrete Scales: a Practical Framework for Effective Visual Depiction of Complex Measures Fanny Chevalier, Romain Vuillemot, Guia Gali
Using Concrete Scales: A Practical Framework for Effective Visual Depiction of Complex Measures Fanny Chevalier, Romain Vuillemot, Guia Gali To cite this version: Fanny Chevalier, Romain Vuillemot, Guia Gali. Using Concrete Scales: A Practical Framework for Effective Visual Depiction of Complex Measures. IEEE Transactions on Visualization and Computer Graphics, Institute of Electrical and Electronics Engineers, 2013, 19 (12), pp.2426-2435. 10.1109/TVCG.2013.210. hal-00851733v1 HAL Id: hal-00851733 https://hal.inria.fr/hal-00851733v1 Submitted on 8 Jan 2014 (v1), last revised 8 Jan 2014 (v2) HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Using Concrete Scales: A Practical Framework for Effective Visual Depiction of Complex Measures Fanny Chevalier, Romain Vuillemot, and Guia Gali a b c Fig. 1. Illustrates popular representations of complex measures: (a) US Debt (Oto Godfrey, Demonocracy.info, 2011) explains the gravity of a 115 trillion dollar debt by progressively stacking 100 dollar bills next to familiar objects like an average-sized human, sports fields, or iconic New York city buildings [15] (b) Sugar stacks (adapted from SugarStacks.com) compares caloric counts contained in various foods and drinks using sugar cubes [32] and (c) How much water is on Earth? (Jack Cook, Woods Hole Oceanographic Institution and Howard Perlman, USGS, 2010) shows the volume of oceans and rivers as spheres whose sizes can be compared to that of Earth [38]. -
Datum Transformations of GPS Positions Application Note
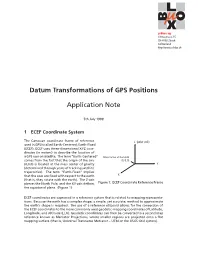
µ-blox ag Gloriastrasse 35 CH-8092 Zürich Switzerland http://www.u-blox.ch Datum Transformations of GPS Positions Application Note 5th July 1999 1 ECEF Coordinate System The Cartesian coordinate frame of reference used in GPS is called Earth-Centered, Earth-Fixed (ECEF). ECEF uses three-dimensional XYZ coor- dinates (in meters) to describe the location of a GPS user or satellite. The term "Earth-Centered" comes from the fact that the origin of the axis (0,0,0) is located at the mass center of gravity (determined through years of tracking satellite trajectories). The term "Earth-Fixed" implies that the axes are fixed with respect to the earth (that is, they rotate with the earth). The Z-axis pierces the North Pole, and the XY-axis defines Figure 1: ECEF Coordinate Reference Frame the equatorial plane. (Figure 1) ECEF coordinates are expressed in a reference system that is related to mapping representa- tions. Because the earth has a complex shape, a simple, yet accurate, method to approximate the earth’s shape is required. The use of a reference ellipsoid allows for the conversion of the ECEF coordinates to the more commonly used geodetic-mapping coordinates of Latitude, Longitude, and Altitude (LLA). Geodetic coordinates can then be converted to a second map reference known as Mercator Projections, where smaller regions are projected onto a flat mapping surface (that is, Universal Transverse Mercator – UTM or the USGS Grid system). 2 2 CONVERSION BETWEEN ECEF AND LOCAL TANGENTIAL PLANE A reference ellipsoid can be described by a series of parameters that define its shape and b e which include a semi-major axis ( a), a semi-minor axis ( ) and its first eccentricity ( )andits 0 second eccentricity ( e ) as shown in Figure 2. -

Elliptical Orbits
1 Ellipse-geometry 1.1 Parameterization • Functional characterization:(a: semi major axis, b ≤ a: semi minor axis) x2 y 2 b p + = 1 ⇐⇒ y(x) = · ± a2 − x2 (1) a b a • Parameterization in cartesian coordinates, which follows directly from Eq. (1): x a · cos t = with 0 ≤ t < 2π (2) y b · sin t – The origin (0, 0) is the center of the ellipse and the auxilliary circle with radius a. √ – The focal points are located at (±a · e, 0) with the eccentricity e = a2 − b2/a. • Parameterization in polar coordinates:(p: parameter, 0 ≤ < 1: eccentricity) p r(ϕ) = (3) 1 + e cos ϕ – The origin (0, 0) is the right focal point of the ellipse. – The major axis is given by 2a = r(0) − r(π), thus a = p/(1 − e2), the center is therefore at − pe/(1 − e2), 0. – ϕ = 0 corresponds to the periapsis (the point closest to the focal point; which is also called perigee/perihelion/periastron in case of an orbit around the Earth/sun/star). The relation between t and ϕ of the parameterizations in Eqs. (2) and (3) is the following: t r1 − e ϕ tan = · tan (4) 2 1 + e 2 1.2 Area of an elliptic sector As an ellipse is a circle with radius a scaled by a factor b/a in y-direction (Eq. 1), the area of an elliptic sector PFS (Fig. ??) is just this fraction of the area PFQ in the auxiliary circle. b t 2 1 APFS = · · πa − · ae · a sin t a 2π 2 (5) 1 = (t − e sin t) · a b 2 The area of the full ellipse (t = 2π) is then, of course, Aellipse = π a b (6) Figure 1: Ellipse and auxilliary circle. -

Small Satellites in Inclined Orbits to Increase Observation Capability Feasibility Analysis
International Journal of Pure and Applied Mathematics Volume 118 No. 17 2018, 273-287 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Special Issue ijpam.eu Small Satellites in Inclined Orbits to Increase Observation Capability Feasibility Analysis DVA Raghava Murthy1, V Kesava Raju2, T.Ramanjappa3, Ritu Karidhal4, Vijayasree Mallikarjuna Kande5, G Ravi chandra Babu6 and A Arunachalam7 1 7 Earth Observations System, ISRO Headquarters, Bengaluru, Karnataka India [email protected] 2 4 5 6ISRO Satellite Centre, Bengaluru, Karnataka, India 3SK University, Ananthapur, Andhra Pradesh, India January 6, 2018 Abstract Over the period of past four decades, Remote Sensing data products and services have been effectively utilized to showcase varieties of applications in many areas of re- sources inventory and monitoring. There are several satel- lite systems in operation today and they operate from Po- lar Orbit and Geosynchronous Orbit, collect the imagery and non-imagery data and provide them to user community for various applications in the areas of natural resources management, urban planning and infrastructure develop- ment, weather forecasting and disaster management sup- port. Quality of information derived from Remote Sensing imagery are strongly influenced by spatial, spectral, radio- metric & temporal resolutions as well as by angular & po- larimetric signatures. As per the conventional approach of 1 273 International Journal of Pure and Applied Mathematics Special Issue having Remote Sensing satellites in near Polar Sun syn- chronous orbit, the temporal resolution, i.e. the frequency with which an area can be frequently observed, is basically defined by the swath of the sensor and distance between the paths. -

Open Rosen Thesis.Pdf
THE PENNSYLVANIA STATE UNIVERSITY SCHREYER HONORS COLLEGE DEPARTMENT OF AEROSPACE ENGINEERING END OF LIFE DISPOSAL OF SATELLITES IN HIGHLY ELLIPTICAL ORBITS MITCHELL ROSEN SPRING 2019 A thesis submitted in partial fulfillment of the requirements for a baccalaureate degree in Aerospace Engineering with honors in Aerospace Engineering Reviewed and approved* by the following: Dr. David Spencer Professor of Aerospace Engineering Thesis Supervisor Dr. Mark Maughmer Professor of Aerospace Engineering Honors Adviser * Signatures are on file in the Schreyer Honors College. i ABSTRACT Highly elliptical orbits allow for coverage of large parts of the Earth through a single satellite, simplifying communications in the globe’s northern reaches. These orbits are able to avoid drastic changes to the argument of periapse by using a critical inclination (63.4°) that cancels out the first level of the geopotential forces. However, this allows the next level of geopotential forces to take over, quickly de-orbiting satellites. Thus, a balance between the rate of change of the argument of periapse and the lifetime of the orbit is necessitated. This thesis sets out to find that balance. It is determined that an orbit with an inclination of 62.5° strikes that balance best. While this orbit is optimal off of the critical inclination, it is still near enough that to allow for potential use of inclination changes as a deorbiting method. Satellites are deorbited when the propellant remaining is enough to perform such a maneuver, and nothing more; therefore, the less change in velocity necessary for to deorbit, the better. Following the determination of an ideal highly elliptical orbit, the different methods of inclination change is tested against the usual method for deorbiting a satellite, an apoapse burn to lower the periapse, to find the most propellant- efficient method. -

Perturbation Theory in Celestial Mechanics
Perturbation Theory in Celestial Mechanics Alessandra Celletti Dipartimento di Matematica Universit`adi Roma Tor Vergata Via della Ricerca Scientifica 1, I-00133 Roma (Italy) ([email protected]) December 8, 2007 Contents 1 Glossary 2 2 Definition 2 3 Introduction 2 4 Classical perturbation theory 4 4.1 The classical theory . 4 4.2 The precession of the perihelion of Mercury . 6 4.2.1 Delaunay action–angle variables . 6 4.2.2 The restricted, planar, circular, three–body problem . 7 4.2.3 Expansion of the perturbing function . 7 4.2.4 Computation of the precession of the perihelion . 8 5 Resonant perturbation theory 9 5.1 The resonant theory . 9 5.2 Three–body resonance . 10 5.3 Degenerate perturbation theory . 11 5.4 The precession of the equinoxes . 12 6 Invariant tori 14 6.1 Invariant KAM surfaces . 14 6.2 Rotational tori for the spin–orbit problem . 15 6.3 Librational tori for the spin–orbit problem . 16 6.4 Rotational tori for the restricted three–body problem . 17 6.5 Planetary problem . 18 7 Periodic orbits 18 7.1 Construction of periodic orbits . 18 7.2 The libration in longitude of the Moon . 20 1 8 Future directions 20 9 Bibliography 21 9.1 Books and Reviews . 21 9.2 Primary Literature . 22 1 Glossary KAM theory: it provides the persistence of quasi–periodic motions under a small perturbation of an integrable system. KAM theory can be applied under quite general assumptions, i.e. a non– degeneracy of the integrable system and a diophantine condition of the frequency of motion. -

Coordinates James R
Coordinates James R. Clynch Naval Postgraduate School, 2002 I. Coordinate Types There are two generic types of coordinates: Cartesian, and Curvilinear of Angular. Those that provide x-y-z type values in meters, kilometers or other distance units are called Cartesian. Those that provide latitude, longitude, and height are called curvilinear or angular. The Cartesian and angular coordinates are equivalent, but only after supplying some extra information. For the spherical earth model only the earth radius is needed. For the ellipsoidal earth, two parameters of the ellipsoid are needed. (These can be any of several sets. The most common is the semi-major axis, called "a", and the flattening, called "f".) II. Cartesian Coordinates A. Generic Cartesian Coordinates These are the coordinates that are used in algebra to plot functions. For a two dimensional system there are two axes, which are perpendicular to each other. The value of a point is represented by the values of the point projected onto the axes. In the figure below the point (5,2) and the standard orientation for the X and Y axes are shown. In three dimensions the same process is used. In this case there are three axis. There is some ambiguity to the orientation of the Z axis once the X and Y axes have been drawn. There 1 are two choices, leading to right and left handed systems. The standard choice, a right hand system is shown below. Rotating a standard (right hand) screw from X into Y advances along the positive Z axis. The point Q at ( -5, -5, 10) is shown. -

New Closed-Form Solutions for Optimal Impulsive Control of Spacecraft Relative Motion
New Closed-Form Solutions for Optimal Impulsive Control of Spacecraft Relative Motion Michelle Chernick∗ and Simone D'Amicoy Aeronautics and Astronautics, Stanford University, Stanford, California, 94305, USA This paper addresses the fuel-optimal guidance and control of the relative motion for formation-flying and rendezvous using impulsive maneuvers. To meet the requirements of future multi-satellite missions, closed-form solutions of the inverse relative dynamics are sought in arbitrary orbits. Time constraints dictated by mission operations and relevant perturbations acting on the formation are taken into account by splitting the optimal recon- figuration in a guidance (long-term) and control (short-term) layer. Both problems are cast in relative orbit element space which allows the simple inclusion of secular and long-periodic perturbations through a state transition matrix and the translation of the fuel-optimal optimization into a minimum-length path-planning problem. Due to the proper choice of state variables, both guidance and control problems can be solved (semi-)analytically leading to optimal, predictable maneuvering schemes for simple on-board implementation. Besides generalizing previous work, this paper finds four new in-plane and out-of-plane (semi-)analytical solutions to the optimal control problem in the cases of unperturbed ec- centric and perturbed near-circular orbits. A general delta-v lower bound is formulated which provides insight into the optimality of the control solutions, and a strong analogy between elliptic Hohmann transfers and formation-flying control is established. Finally, the functionality, performance, and benefits of the new impulsive maneuvering schemes are rigorously assessed through numerical integration of the equations of motion and a systematic comparison with primer vector optimal control.