Chapter 2 - Kinematics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Two-Dimensional Rotational Kinematics Rigid Bodies
Rigid Bodies A rigid body is an extended object in which the Two-Dimensional Rotational distance between any two points in the object is Kinematics constant in time. Springs or human bodies are non-rigid bodies. 8.01 W10D1 Rotation and Translation Recall: Translational Motion of of Rigid Body the Center of Mass Demonstration: Motion of a thrown baton • Total momentum of system of particles sys total pV= m cm • External force and acceleration of center of mass Translational motion: external force of gravity acts on center of mass sys totaldp totaldVcm total FAext==mm = cm Rotational Motion: object rotates about center of dt dt mass 1 Main Idea: Rotation of Rigid Two-Dimensional Rotation Body Torque produces angular acceleration about center of • Fixed axis rotation: mass Disc is rotating about axis τ total = I α passing through the cm cm cm center of the disc and is perpendicular to the I plane of the disc. cm is the moment of inertial about the center of mass • Plane of motion is fixed: α is the angular acceleration about center of mass cm For straight line motion, bicycle wheel rotates about fixed direction and center of mass is translating Rotational Kinematics Fixed Axis Rotation: Angular for Fixed Axis Rotation Velocity Angle variable θ A point like particle undergoing circular motion at a non-constant speed has SI unit: [rad] dθ ω ≡≡ω kkˆˆ (1)An angular velocity vector Angular velocity dt SI unit: −1 ⎣⎡rad⋅ s ⎦⎤ (2) an angular acceleration vector dθ Vector: ω ≡ Component dt dθ ω ≡ magnitude dt ω >+0, direction kˆ direction ω < 0, direction − kˆ 2 Fixed Axis Rotation: Angular Concept Question: Angular Acceleration Speed 2 ˆˆd θ Object A sits at the outer edge (rim) of a merry-go-round, and Angular acceleration: α ≡≡α kk2 object B sits halfway between the rim and the axis of rotation. -
Datum Transformations of GPS Positions Application Note
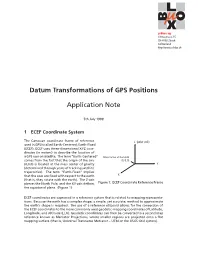
µ-blox ag Gloriastrasse 35 CH-8092 Zürich Switzerland http://www.u-blox.ch Datum Transformations of GPS Positions Application Note 5th July 1999 1 ECEF Coordinate System The Cartesian coordinate frame of reference used in GPS is called Earth-Centered, Earth-Fixed (ECEF). ECEF uses three-dimensional XYZ coor- dinates (in meters) to describe the location of a GPS user or satellite. The term "Earth-Centered" comes from the fact that the origin of the axis (0,0,0) is located at the mass center of gravity (determined through years of tracking satellite trajectories). The term "Earth-Fixed" implies that the axes are fixed with respect to the earth (that is, they rotate with the earth). The Z-axis pierces the North Pole, and the XY-axis defines Figure 1: ECEF Coordinate Reference Frame the equatorial plane. (Figure 1) ECEF coordinates are expressed in a reference system that is related to mapping representa- tions. Because the earth has a complex shape, a simple, yet accurate, method to approximate the earth’s shape is required. The use of a reference ellipsoid allows for the conversion of the ECEF coordinates to the more commonly used geodetic-mapping coordinates of Latitude, Longitude, and Altitude (LLA). Geodetic coordinates can then be converted to a second map reference known as Mercator Projections, where smaller regions are projected onto a flat mapping surface (that is, Universal Transverse Mercator – UTM or the USGS Grid system). 2 2 CONVERSION BETWEEN ECEF AND LOCAL TANGENTIAL PLANE A reference ellipsoid can be described by a series of parameters that define its shape and b e which include a semi-major axis ( a), a semi-minor axis ( ) and its first eccentricity ( )andits 0 second eccentricity ( e ) as shown in Figure 2. -

Coordinates James R
Coordinates James R. Clynch Naval Postgraduate School, 2002 I. Coordinate Types There are two generic types of coordinates: Cartesian, and Curvilinear of Angular. Those that provide x-y-z type values in meters, kilometers or other distance units are called Cartesian. Those that provide latitude, longitude, and height are called curvilinear or angular. The Cartesian and angular coordinates are equivalent, but only after supplying some extra information. For the spherical earth model only the earth radius is needed. For the ellipsoidal earth, two parameters of the ellipsoid are needed. (These can be any of several sets. The most common is the semi-major axis, called "a", and the flattening, called "f".) II. Cartesian Coordinates A. Generic Cartesian Coordinates These are the coordinates that are used in algebra to plot functions. For a two dimensional system there are two axes, which are perpendicular to each other. The value of a point is represented by the values of the point projected onto the axes. In the figure below the point (5,2) and the standard orientation for the X and Y axes are shown. In three dimensions the same process is used. In this case there are three axis. There is some ambiguity to the orientation of the Z axis once the X and Y axes have been drawn. There 1 are two choices, leading to right and left handed systems. The standard choice, a right hand system is shown below. Rotating a standard (right hand) screw from X into Y advances along the positive Z axis. The point Q at ( -5, -5, 10) is shown. -

Kinematics, Impulse, and Human Running
Kinematics, Impulse, and Human Running Kinematics, Impulse, and Human Running Purpose This lesson explores how kinematics and impulse can be used to analyze human running performance. Students will explore how scientists determined the physical factors that allow elite runners to travel at speeds far beyond the average jogger. Audience This lesson was designed to be used in an introductory high school physics class. Lesson Objectives Upon completion of this lesson, students will be able to: ஃ describe the relationship between impulse and momentum. ஃ apply impulse-momentum theorem to explain the relationship between the force a runner applies to the ground, the time a runner is in contact with the ground, and a runner’s change in momentum. Key Words aerial phase, contact phase, momentum, impulse, force Big Question This lesson plan addresses the Big Question “What does it mean to observe?” Standard Alignments ஃ Science and Engineering Practices ஃ SP 4. Analyzing and interpreting data ஃ SP 5. Using mathematics and computational thinking ஃ MA Science and Technology/Engineering Standards (2016) ஃ HS-PS2-10(MA). Use algebraic expressions and Newton’s laws of motion to predict changes to velocity and acceleration for an object moving in one dimension in various situations. ஃ HS-PS2-3. Apply scientific principles of motion and momentum to design, evaluate, and refine a device that minimizes the force on a macroscopic object during a collision. ஃ NGSS Standards (2013) HS-PS2-2. Use mathematical representations to support the claim that the total momentum of a system of objects is conserved when there is no net force on the system. -

Kinematics Big Ideas and Equations Position Vs
Kinematics Big Ideas and Equations Position vs. Time graphs Big Ideas: A straight line on a p vs t graph indicates constant speed (and velocity) An object at rest is indicated by a horizontal line The slope of a line on a p vs. t graph = velocity of the object (steeper = faster) The main difference between speed and velocity is that velocity incorporates direction o Speed will always be positive but velocity can be positive or negative o Positive vs. Negative slopes indicates the direction; toward the positive end of an axis (number line) or the negative end. For motion detectors this indicates toward (-) and away (+), but only because there is no negative side to the axis. An object with continuously changing speed will have a curved P vs. t graph; (curving steeper – speeding up, curving flatter – slowing down) (Instantaneous) velocity = average velocity if P vs. t is a (straight) line. Velocity vs Time graphs Big Ideas: The velocity can be found by calculating the slope of a position-time graph Constant velocity on a velocity vs. time graph is indicated with a horizontal line. Changing velocity is indicated by a line that slopes up or down. Speed increases when Velocity graph slopes away from v=0 axis. Speed decreases when velocity graph slopes toward v=0 axis. The velocity is negative if the object is moving toward the negative end of the axis - if the final position is less than the initial position (or for motion detectors if the object moves toward the detector) The slope of a velocity vs. -

Chapter 4 One Dimensional Kinematics
Chapter 4 One Dimensional Kinematics 4.1 Introduction ............................................................................................................. 1 4.2 Position, Time Interval, Displacement .................................................................. 2 4.2.1 Position .............................................................................................................. 2 4.2.2 Time Interval .................................................................................................... 2 4.2.3 Displacement .................................................................................................... 2 4.3 Velocity .................................................................................................................... 3 4.3.1 Average Velocity .............................................................................................. 3 4.3.3 Instantaneous Velocity ..................................................................................... 3 Example 4.1 Determining Velocity from Position .................................................. 4 4.4 Acceleration ............................................................................................................. 5 4.4.1 Average Acceleration ....................................................................................... 5 4.4.2 Instantaneous Acceleration ............................................................................. 6 Example 4.2 Determining Acceleration from Velocity ......................................... -

Rotational Motion and Angular Momentum 317
CHAPTER 10 | ROTATIONAL MOTION AND ANGULAR MOMENTUM 317 10 ROTATIONAL MOTION AND ANGULAR MOMENTUM Figure 10.1 The mention of a tornado conjures up images of raw destructive power. Tornadoes blow houses away as if they were made of paper and have been known to pierce tree trunks with pieces of straw. They descend from clouds in funnel-like shapes that spin violently, particularly at the bottom where they are most narrow, producing winds as high as 500 km/h. (credit: Daphne Zaras, U.S. National Oceanic and Atmospheric Administration) Learning Objectives 10.1. Angular Acceleration • Describe uniform circular motion. • Explain non-uniform circular motion. • Calculate angular acceleration of an object. • Observe the link between linear and angular acceleration. 10.2. Kinematics of Rotational Motion • Observe the kinematics of rotational motion. • Derive rotational kinematic equations. • Evaluate problem solving strategies for rotational kinematics. 10.3. Dynamics of Rotational Motion: Rotational Inertia • Understand the relationship between force, mass and acceleration. • Study the turning effect of force. • Study the analogy between force and torque, mass and moment of inertia, and linear acceleration and angular acceleration. 10.4. Rotational Kinetic Energy: Work and Energy Revisited • Derive the equation for rotational work. • Calculate rotational kinetic energy. • Demonstrate the Law of Conservation of Energy. 10.5. Angular Momentum and Its Conservation • Understand the analogy between angular momentum and linear momentum. • Observe the relationship between torque and angular momentum. • Apply the law of conservation of angular momentum. 10.6. Collisions of Extended Bodies in Two Dimensions • Observe collisions of extended bodies in two dimensions. • Examine collision at the point of percussion. -

ECEF) Coordinate System
2458-6 Workshop on GNSS Data Application to Low Latitude Ionospheric Research 6 - 17 May 2013 Fundamentals of Satellite Navigation HEGARTY Christopher The MITRE Corporation 202 Burlington Rd. / Rte 62 Bedford MA 01730-1420 U.S.A. Fundamentals of Satellite Navigation Chris Hegarty May 2013 1 © 2013 The MITRE Corporation. All rights reserved. Chris Hegarty The MITRE Corporation [email protected] 781-271-2127 (Tel) The contents of this material reflect the views of the author. Neither the Federal Aviation Administration nor the Department of the Transportation makes any warranty or guarantee, or promise, expressed or implied, concerning the content or accuracy of the views expressed herein. 2 Fundamentals of Satellite Navigation ■ Geodesy ■ Time and clocks ■ Satellite orbits ■ Positioning 3 © 2013 The MITRE Corporation. All rights reserved. Earth Centered Inertial (ECI) Coordinate System • Oblateness of the Earth causes direction of axes to move over time • So that coordinate system is truly “inertial” (fixed with respect to stars), it is necessary to fix coordinates • J2000 system fixes coordinates at 11:58:55.816 hours UTC on January 1, 2000 4 © 2013 The MITRE Corporation. All rights reserved. Precession and Nutation Vega Polaris 1.Rotation axis 2. In ~13,000 (now pointing yrs, rotation near Polaris) axis will point near Vega 3. In ~26,000 yrs, back to Earth Polaris •Precession is the large (23.5 deg half-angle) periodic motion •Nutation is a superimposed oscillation (~9 arcsec max) 5 © 2013 The MITRE Corporation. All rights reserved. Earth Centered Earth Fixed (ECEF) Coordinate System Notes: (1) By convention, the z-axis is the mean location of the north pole (spin axis of Earth) for 1900 – 1905, (2) the x-axis passes through 0º longitude, (3) the Earth’s crust moves slowly with respect to this coordinate system! 6 © 2013 The MITRE Corporation. -

Kinematics Definition: (A) the Branch of Mechanics Concerned with The
Chapter 3 – Kinematics Definition: (a) The branch of mechanics concerned with the motion of objects without reference to the forces that cause the motion. (b) The features or properties of motion in an object, regarded in such a way. “Kinematics can be used to find the possible range of motion for a given mechanism, or, working in reverse, can be used to design a mechanism that has a desired range of motion. The movement of a crane and the oscillations of a piston in an engine are both simple kinematic systems. The crane is a type of open kinematic chain, while the piston is part of a closed four‐bar linkage.” Distinguished from dynamics, e.g. F = ma Several considerations: 3.2 – 3.2.2 How do wheels motions affect robot motion (HW 2) 3.2.3 Wheel constraints (rolling and sliding) for Fixed standard wheel Steered standard wheel Castor wheel Swedish wheel Spherical wheel 3.2.4 Combine effects of all the wheels to determine the constraints on the robot. “Given a mobile robot with M wheels…” 3.2.5 Two examples drawn from 3.2.4: Differential drive. Yields same result as in 3.2 (HW 2) Omnidrive (3 Swedish wheels) Conclusion (pp. 76‐77): “We can see from the preceding examples that robot motion can be predicted by combining the rolling constraints of individual wheels.” “The sliding constraints can be used to …evaluate the maneuverability and workspace of the robot rather than just its predicted motion.” 3.3 Mobility and (vs.) Maneuverability Mobility: ability to directly move in the environment. -
Engineering Mechanics
Course Material in Dynamics by Dr.M.Madhavi,Professor,MED Course Material Engineering Mechanics Dynamics of Rigid Bodies by Dr.M.Madhavi, Professor, Department of Mechanical Engineering, M.V.S.R.Engineering College, Hyderabad. Course Material in Dynamics by Dr.M.Madhavi,Professor,MED Contents I. Kinematics of Rigid Bodies 1. Introduction 2. Types of Motions 3. Rotation of a rigid Body about a fixed axis. 4. General Plane motion. 5. Absolute and Relative Velocity in plane motion. 6. Instantaneous centre of rotation in plane motion. 7. Absolute and Relative Acceleration in plane motion. 8. Analysis of Plane motion in terms of a Parameter. 9. Coriolis Acceleration. 10.Problems II.Kinetics of Rigid Bodies 11. Introduction 12.Analysis of Plane Motion. 13.Fixed axis rotation. 14.Rolling References I. Kinematics of Rigid Bodies I.1 Introduction Course Material in Dynamics by Dr.M.Madhavi,Professor,MED In this topic ,we study the characteristics of motion of a rigid body and its related kinematic equations to obtain displacement, velocity and acceleration. Rigid Body: A rigid body is a combination of a large number of particles occupying fixed positions with respect to each other. A rigid body being defined as one which does not deform. 2.0 Types of Motions 1. Translation : A motion is said to be a translation if any straight line inside the body keeps the same direction during the motion. It can also be observed that in a translation all the particles forming the body move along parallel paths. If these paths are straight lines. The motion is said to be a rectilinear translation (Fig 1); If the paths are curved lines, the motion is a curvilinear translation. -

Improved Kalman Filter Variants for UAV Tracking with Radar Motion Models
electronics Article Improved Kalman Filter Variants for UAV Tracking with Radar Motion Models Yuan Wei 1 , Tao Hong 2,3 and Michel Kadoch 4,* 1 School of Electronic and Information Engineering, Beihang University, Beijing 100191, China; [email protected] 2 Yunnan Innovation Institute BUAA, Kunming 650233, China; [email protected] · 3 Beijing Key Laboratory for Microwave Sensing and Security Applications, Beihang University, Beijing 100191, China 4 Department of Electrical Engineering, ETS, University of Quebec, Montreal, QC H1A 0A1, Canada * Correspondence: [email protected] Received: 8 April 2020; Accepted: 30 April 2020; Published: 7 May 2020 Abstract: Unmanned aerial vehicles (UAV) have made a huge influence on our everyday life with maturity of technology and more extensive applications. Tracking UAVs has become more and more significant because of not only their beneficial location-based service, but also their potential threats. UAVs are low-altitude, slow-speed, and small targets, which makes it possible to track them with mobile radars, such as vehicle radars and UAVs with radars. Kalman filter and its variant algorithms are widely used to extract useful trajectory information from data mixed with noise. Applying those filter algorithms in east-north-up (ENU) coordinates with mobile radars causes filter performance degradation. To improve this, we made a derivation on the motion-model consistency of mobile radar with constant velocity. Then, extending common filter algorithms into earth-centered earth-fixed (ECEF) coordinates to filter out random errors is proposed. The theory analysis and simulation shows that the improved algorithms provide more efficiency and compatibility in mobile radar scenes. -

Kinematics and Dynamics in Noninertial Quantum Frames of Reference
Home Search Collections Journals About Contact us My IOPscience Kinematics and dynamics in noninertial quantum frames of reference This article has been downloaded from IOPscience. Please scroll down to see the full text article. 2012 J. Phys. A: Math. Theor. 45 465306 (http://iopscience.iop.org/1751-8121/45/46/465306) View the table of contents for this issue, or go to the journal homepage for more Download details: IP Address: 200.17.209.129 The article was downloaded on 01/11/2012 at 10:30 Please note that terms and conditions apply. IOP PUBLISHING JOURNAL OF PHYSICS A: MATHEMATICAL AND THEORETICAL J. Phys. A: Math. Theor. 45 (2012) 465306 (19pp) doi:10.1088/1751-8113/45/46/465306 Kinematics and dynamics in noninertial quantum frames of reference R M Angelo and A D Ribeiro Departamento de F´ısica, Universidade Federal do Parana,´ PO Box 19044, 81531-980, Curitiba, PR, Brazil E-mail: renato@fisica.ufpr.br Received 4 May 2012, in final form 21 September 2012 Published 31 October 2012 Online at stacks.iop.org/JPhysA/45/465306 Abstract From the principle that there is no absolute description of a physical state, we advance the approach according to which one should be able to describe the physics from the perspective of a quantum particle. The kinematics seen from this frame of reference is shown to be rather unconventional. In particular, we discuss several subtleties emerging in the relative formulation of central notions, such as vector states, the classical limit, entanglement, uncertainty relations and the complementary principle. A Hamiltonian formulation is also derived which correctly encapsulates effects of fictitious forces associated with the accelerated motion of the frame.