Concepts of Programming Languages – Copl'15
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Thinkjs 2.0 Documentation
ThinkJS 2.0 Documentation ᳪفள᭛ Օᕨ ጱ Node.js MVC ຝֵ҅አ ES7 Ӿ async/await ҅ᘏ ES6ݎෛقThinkJS ฎӞֵྃአ ES6/7 ᇙ තԧࢵٖक़ռग़ຝጱᦡᦇቘஷޕӾጱ */yield ᇙବᥴ٬ԧ Node.js Ӿྍ્ॺጱᳯ̶᷌ݶ ṛප̶̵ܔᓌےNode.js ᶱፓๅ ݎమ҅ᦏ පሲ҅ฎ۠ಅࣁ̶ଚӬෛᇇጱ Node.js ES6 ᇙԞํԧݎᶱፓݢզय़य़ṛݎአ ES6/7 ᇙֵ Զᇙᬮဌํඪ೮҅Ԟݢզۗ Babel ᖫᦲඪ೮̶ํֵܨঅጱඪ೮҅ ᇙ ᶱፓݎአ ES6/7 ᇙֵ ᇇӧඪ೮̶੦ٌฎֵڹۗ Babel ᖫᦲ҅ݢզࣁᶱፓӾय़ᙦֵአ ES6/7 ಅํጱᇙ҅෫ᵱஞߺԶᇙ୮ አ async/await ᘏ */yield ᥴ٬ྍࢧ᧣ጱᳯ̶᷌ JavaScript //user controller, home/controller/user.js export default class extends think.controller.base { //login action async loginAction(self){ //ইຎฎget᧗҅ፗളดᐏጭ୯ᶭᶎ if(this.isGet()){ return this.display(); } ᬯ᯾ݢզ᭗ᬦpostොဩ឴ݐಅํጱහഝ҅හഝ૪ᕪࣁlogic᯾؉ԧ໊ḵ// let data = this.post(); let md5 = think.md5('think_' + data.pwd); ᯈහഝପӾԭጱፓ܃ݸጱੂᎱ݄ੂےአಁݷ// let result = await this.model('user').where({name: data.name, pwd: md5}).find(); ձ֜හഝ҅ᤒᐏአಁݷᘏੂᎱᲙکᯈ܃ইຎ๚// if(think.isEmpty(result)){ return this.fail('login fail'); } sessionفٟ௳מݸ҅ਖ਼አಁ௳מአಁک឴ݐ// await this.session('userInfo', result); return this.success(); } } ӤᶎጱդᎱ౯ժֵአԧ ES6 ᯾ጱ class , export , let զ݊ ES7 ᯾ጱ async await ᒵᇙ҅ Session ᮷ฎྍ֢҅֕ۗ async/await ҅դᎱ᮷ฎݶྍԡٟጱ̶๋ݸֵ فᡱᆐັᧃහഝପٟ አ Babel ᬰᤈᖫᦲ҅੪ݢզᑞਧᬩᤈࣁ Node.js ጱሾहӾԧ̶ ඪ೮ग़ᐿᶱፓᕮग़ᐿᶱፓሾह ̶ݎཛྷࣘཛྷୗᒵग़ᐿᶱፓᕮ҅ݢզჿ᪃ݱᐿᶱፓ॔ଶጱړཛྷࣘཛྷୗ̵ฦ᭗ཛྷୗ̵ܔᶱፓඪ೮ ἕᦊඪ೮ development ҅ testing prodution 3 ᐿᶱፓሾह҅ݢզࣁӧݶጱᶱፓሾहӥᬰᤈӧݶ ጱᯈᗝ҅ჿ᪃ࣁӧݶሾहӥጱᯈᗝᵱ҅ݶᬮݢզचԭᶱፓᵱᥝᬰᤈಘ̶ ඪ೮ӿጱහഝପ ThinkJS ඪ೮ mysql ҅ mongodb ҅ sqlite ᒵଉᥠጱහഝପ҅ଚӬᤰԧஉग़֢හഝପጱളݗ҅෫ᵱ ᚆ̶ۑᘶཛྷࣳᒵṛᕆى̵ۓᄋ၏̶ݶඪ೮Ԫقᒵਞفಋۖ೪ള SQL ݙ҅ᬮݢզᛔۖᴠྊ SQL ဳ դᎱᛔۖๅෛ Ԟӧአۗᒫӣ҅ۓNode.js ๐ ސኞප҅ӧአ᯿ܨදݸᒈץկ҅ګThinkJS ٖᗝԧӞॺդᎱᛔۖๅෛጱ ොཛྷ̶ࣘ ୌ REST ളݗڠᛔۖ ইຎమࣁ̶ݎݢਠ౮ REST API ጱܨୌ REST -
Chapter 1 Introduction to Computers, Programs, and Java
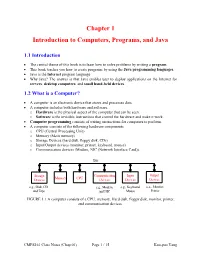
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • The central theme of this book is to learn how to solve problems by writing a program . • This book teaches you how to create programs by using the Java programming languages . • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers , desktop computers , and small hand-held devices . 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Computer programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Bus Storage Communication Input Output Memory CPU Devices Devices Devices Devices e.g., Disk, CD, e.g., Modem, e.g., Keyboard, e.g., Monitor, and Tape and NIC Mouse Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. CMPS161 Class Notes (Chap 01) Page 1 / 15 Kuo-pao Yang 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. -

Why Untyped Nonground Metaprogramming Is Not (Much Of) a Problem
NORTH- HOLLAND WHY UNTYPED NONGROUND METAPROGRAMMING IS NOT (MUCH OF) A PROBLEM BERN MARTENS* and DANNY DE SCHREYE+ D We study a semantics for untyped, vanilla metaprograms, using the non- ground representation for object level variables. We introduce the notion of language independence, which generalizes range restriction. We show that the vanilla metaprogram associated with a stratified normal oljjctct program is weakly stratified. For language independent, stratified normal object programs, we prove that there is a natural one-to-one correspon- dence between atoms p(tl, . , tr) in the perfect Herbrand model of t,he object program and solve(p(tl, , tT)) atoms in the weakly perfect Her\) and model of the associated vanilla metaprogram. Thus, for this class of programs, the weakly perfect, Herbrand model provides a sensible SC mantics for the metaprogram. We show that this result generalizes to nonlanguage independent programs in the context of an extended Hcr- brand semantics, designed to closely mirror the operational behavior of logic programs. Moreover, we also consider a number of interesting exterl- sions and/or variants of the basic vanilla metainterpreter. For instance. WC demonstrate how our approach provides a sensible semantics for a limit4 form of amalgamation. a “Partly supported by the Belgian National Fund for Scientific Research, partly by ESPRlT BRA COMPULOG II, Contract 6810, and partly by GOA “Non-Standard Applications of Ab- stract Interpretation,” Belgium. TResearch Associate of the Belgian National Fund for Scientific Research Address correspondence to Bern Martens and Danny De Schreye, Department of Computer Science, Katholieke Universiteit Leuven, Celestijnenlaan 200A. B-3001 Hevrrlee Belgium E-mail- {bern, dannyd}@cs.kuleuven.ac.be. -

R from a Programmer's Perspective Accompanying Manual for an R Course Held by M
DSMZ R programming course R from a programmer's perspective Accompanying manual for an R course held by M. Göker at the DSMZ, 11/05/2012 & 25/05/2012. Slightly improved version, 10/09/2012. This document is distributed under the CC BY 3.0 license. See http://creativecommons.org/licenses/by/3.0 for details. Introduction The purpose of this course is to cover aspects of R programming that are either unlikely to be covered elsewhere or likely to be surprising for programmers who have worked with other languages. The course thus tries not be comprehensive but sort of complementary to other sources of information. Also, the material needed to by compiled in short time and perhaps suffers from important omissions. For the same reason, potential participants should not expect a fully fleshed out presentation but a combination of a text-only document (this one) with example code comprising the solutions of the exercises. The topics covered include R's general features as a programming language, a recapitulation of R's type system, advanced coding of functions, error handling, the use of attributes in R, object-oriented programming in the S3 system, and constructing R packages (in this order). The expected audience comprises R users whose own code largely consists of self-written functions, as well as programmers who are fluent in other languages and have some experience with R. Interactive users of R without programming experience elsewhere are unlikely to benefit from this course because quite a few programming skills cannot be covered here but have to be presupposed. -

1 More on Type Checking Type Checking Done at Compile Time Is
More on Type Checking Type Checking done at compile time is said to be static type checking. Type Checking done at run time is said to be dynamic type checking. Dynamic type checking is usually performed immediately before the execution of a particular operation. Dynamic type checking is usually implemented by storing a type tag in each data object that indicates the data type of the object. Dynamic type checking languages include SNOBOL4, LISP, APL, PERL, Visual BASIC, Ruby, and Python. Dynamic type checking is more often used in interpreted languages, whereas static type checking is used in compiled languages. Static type checking languages include C, Java, ML, FORTRAN, PL/I and Haskell. Static and Dynamic Type Checking The choice between static and dynamic typing requires some trade-offs. Many programmers strongly favor one over the other; some to the point of considering languages following the disfavored system to be unusable or crippled. Static typing finds type errors reliably and at compile time. This should increase the reliability of delivered program. However, programmers disagree over how common type errors are, and thus what proportion of those bugs which are written would be caught by static typing. Static typing advocates believe programs are more reliable when they have been type-checked, while dynamic typing advocates point to distributed code that has proven reliable and to small bug databases. The value of static typing, then, presumably increases as the strength of the type system is inc reased. Advocates of languages such as ML and Haskell have suggested that almost all bugs can be considered type errors, if the types used in a program are sufficiently well declared by the programmer or inferred by the compiler. -

Compiler Error Messages Considered Unhelpful: the Landscape of Text-Based Programming Error Message Research
Working Group Report ITiCSE-WGR ’19, July 15–17, 2019, Aberdeen, Scotland Uk Compiler Error Messages Considered Unhelpful: The Landscape of Text-Based Programming Error Message Research Brett A. Becker∗ Paul Denny∗ Raymond Pettit∗ University College Dublin University of Auckland University of Virginia Dublin, Ireland Auckland, New Zealand Charlottesville, Virginia, USA [email protected] [email protected] [email protected] Durell Bouchard Dennis J. Bouvier Brian Harrington Roanoke College Southern Illinois University Edwardsville University of Toronto Scarborough Roanoke, Virgina, USA Edwardsville, Illinois, USA Scarborough, Ontario, Canada [email protected] [email protected] [email protected] Amir Kamil Amey Karkare Chris McDonald University of Michigan Indian Institute of Technology Kanpur University of Western Australia Ann Arbor, Michigan, USA Kanpur, India Perth, Australia [email protected] [email protected] [email protected] Peter-Michael Osera Janice L. Pearce James Prather Grinnell College Berea College Abilene Christian University Grinnell, Iowa, USA Berea, Kentucky, USA Abilene, Texas, USA [email protected] [email protected] [email protected] ABSTRACT of evidence supporting each one (historical, anecdotal, and empiri- Diagnostic messages generated by compilers and interpreters such cal). This work can serve as a starting point for those who wish to as syntax error messages have been researched for over half of a conduct research on compiler error messages, runtime errors, and century. Unfortunately, these messages which include error, warn- warnings. We also make the bibtex file of our 300+ reference corpus ing, and run-time messages, present substantial difficulty and could publicly available. -

Practical Reflection and Metaprogramming for Dependent
Practical Reflection and Metaprogramming for Dependent Types David Raymond Christiansen Advisor: Peter Sestoft Submitted: November 2, 2015 i Abstract Embedded domain-specific languages are special-purpose pro- gramming languages that are implemented within existing general- purpose programming languages. Dependent type systems allow strong invariants to be encoded in representations of domain-specific languages, but it can also make it difficult to program in these em- bedded languages. Interpreters and compilers must always take these invariants into account at each stage, and authors of embedded languages must work hard to relieve users of the burden of proving these properties. Idris is a dependently typed functional programming language whose semantics are given by elaboration to a core dependent type theory through a tactic language. This dissertation introduces elabo- rator reflection, in which the core operators of the elaborator are real- ized as a type of computations that are executed during the elab- oration process of Idris itself, along with a rich API for reflection. Elaborator reflection allows domain-specific languages to be imple- mented using the same elaboration technology as Idris itself, and it gives them additional means of interacting with native Idris code. It also allows Idris to be used as its own metalanguage, making it into a programmable programming language and allowing code re-use across all three stages: elaboration, type checking, and execution. Beyond elaborator reflection, other forms of compile-time reflec- tion have proven useful for embedded languages. This dissertation also describes error reflection, in which Idris code can rewrite DSL er- ror messages before presenting domain-specific messages to users, as well as a means for integrating quasiquotation into a tactic-based elaborator so that high-level syntax can be used for low-level reflected terms. -

Parallel Functional Programming with APL
Parallel Functional Programming, APL Lecture 1 Parallel Functional Programming with APL Martin Elsman Department of Computer Science University of Copenhagen DIKU December 19, 2016 Martin Elsman (DIKU) Parallel Functional Programming, APL Lecture 1 December 19, 2016 1 / 18 Outline 1 Outline Course Outline 2 Introduction to APL What is APL APL Implementations and Material APL Scalar Operations APL (1-Dimensional) Vector Computations Declaring APL Functions (dfns) APL Multi-Dimensional Arrays Iterations Declaring APL Operators Function Trains Examples Reading Martin Elsman (DIKU) Parallel Functional Programming, APL Lecture 1 December 19, 2016 2 / 18 Outline Course Outline Teachers Martin Elsman (ME), Ken Friis Larsen (KFL), Andrzej Filinski (AF), and Troels Henriksen (TH) Location Lectures in Small Aud, Universitetsparken 1 (UP1); Labs in Old Library, UP1 Course Description See http://kurser.ku.dk/course/ndak14009u/2016-2017 Course Outline Week 47 48 49 50 51 1–3 Mon 13–15 Intro, Futhark Parallel SNESL APL (ME) Project Futhark (ME) Haskell (AF) (ME) (KFL) Mon 15–17 Lab Lab Lab Lab Project Wed 13–15 Futhark Parallel SNESL Invited APL Project (ME) Haskell (AF) Lecture (ME) / (KFL) (John Projects Reppy) Martin Elsman (DIKU) Parallel Functional Programming, APL Lecture 1 December 19, 2016 3 / 18 Introduction to APL What is APL APL—An Ancient Array Programming Language—But Still Used! Pioneered by Ken E. Iverson in the 1960’s. E. Dijkstra: “APL is a mistake, carried through to perfection.” There are quite a few APL programmers around (e.g., HIPERFIT partners). Very concise notation for expressing array operations. Has a large set of functional, essentially parallel, multi- dimensional, second-order array combinators. -

Mapping Topic Maps to Common Logic
MAPPING TOPIC MAPS TO COMMON LOGIC Tamas´ DEMIAN´ Advisor: Andras´ PATARICZA I. Introduction This work is a case study for the mapping of a particular formal language (Topic Map[1] (TM)) to Common Logic[2] (CL). CL was intended to be a uniform platform ensuring a seamless syntactic and semantic integration of knowledge represented in different formal languages. CL is based on first-order logic (FOL) with a precise model-theoretic semantic. The exact target language is Common Logic Interchange Format (CLIF), the most common dialect of CL. Both CL and TM are ISO standards and their metamodels are included in the Object Definition Metamodel[3] (ODM). ODM was intended to serve as foundation of Model Driven Architecture (MDA) offering formal basis for representation, management, interoperability, and semantics. The paper aims at the evaluation of the use of CL as a fusion platform on the example of TM. II. The Topic Maps TM is a technology for modelling knowledge and connecting this structured knowledge to relevant information sources. A central operation in TMs is merging, aiming at the elimination of redundant TM constructs. TopicMapConstruct is the top-level abstract class in the TM metamodel (Fig. 1). The later detailed ReifiableConstruct, TypeAble and ScopeAble classes are also abstract. The remaining classes are pairwise disjoint. Figure 1: The class hierarchy and the relation and attribute names of the TM metamodel. TopicMap is a set of topics and associations. Topic is a symbol used within a TM to represent exactly one subject, in order to allow statements to be made about that subject. -

Functional and Logic Programming - Wolfgang Schreiner
COMPUTER SCIENCE AND ENGINEERING - Functional and Logic Programming - Wolfgang Schreiner FUNCTIONAL AND LOGIC PROGRAMMING Wolfgang Schreiner Research Institute for Symbolic Computation (RISC-Linz), Johannes Kepler University, A-4040 Linz, Austria, [email protected]. Keywords: declarative programming, mathematical functions, Haskell, ML, referential transparency, term reduction, strict evaluation, lazy evaluation, higher-order functions, program skeletons, program transformation, reasoning, polymorphism, functors, generic programming, parallel execution, logic formulas, Horn clauses, automated theorem proving, Prolog, SLD-resolution, unification, AND/OR tree, constraint solving, constraint logic programming, functional logic programming, natural language processing, databases, expert systems, computer algebra. Contents 1. Introduction 2. Functional Programming 2.1 Mathematical Foundations 2.2 Programming Model 2.3 Evaluation Strategies 2.4 Higher Order Functions 2.5 Parallel Execution 2.6 Type Systems 2.7 Implementation Issues 3. Logic Programming 3.1 Logical Foundations 3.2. Programming Model 3.3 Inference Strategy 3.4 Extra-Logical Features 3.5 Parallel Execution 4. Refinement and Convergence 4.1 Constraint Logic Programming 4.2 Functional Logic Programming 5. Impacts on Computer Science Glossary BibliographyUNESCO – EOLSS Summary SAMPLE CHAPTERS Most programming languages are models of the underlying machine, which has the advantage of a rather direct translation of a program statement to a sequence of machine instructions. Some languages, however, are based on models that are derived from mathematical theories, which has the advantages of a more concise description of a program and of a more natural form of reasoning and transformation. In functional languages, this basis is the concept of a mathematical function which maps a given argument values to some result value. -

Programming Language
Programming language A programming language is a formal language, which comprises a set of instructions that produce various kinds of output. Programming languages are used in computer programming to implement algorithms. Most programming languages consist of instructions for computers. There are programmable machines that use a set of specific instructions, rather than general programming languages. Early ones preceded the invention of the digital computer, the first probably being the automatic flute player described in the 9th century by the brothers Musa in Baghdad, during the Islamic Golden Age.[1] Since the early 1800s, programs have been used to direct the behavior of machines such as Jacquard looms, music boxes and player pianos.[2] The programs for these The source code for a simple computer program written in theC machines (such as a player piano's scrolls) did not programming language. When compiled and run, it will give the output "Hello, world!". produce different behavior in response to different inputs or conditions. Thousands of different programming languages have been created, and more are being created every year. Many programming languages are written in an imperative form (i.e., as a sequence of operations to perform) while other languages use the declarative form (i.e. the desired result is specified, not how to achieve it). The description of a programming language is usually split into the two components ofsyntax (form) and semantics (meaning). Some languages are defined by a specification document (for example, theC programming language is specified by an ISO Standard) while other languages (such as Perl) have a dominant implementation that is treated as a reference. -

RAL-TR-1998-060 Co-Array Fortran for Parallel Programming
RAL-TR-1998-060 Co-Array Fortran for parallel programming 1 by R. W. Numrich23 and J. K. Reid Abstract Co-Array Fortran, formerly known as F−− , is a small extension of Fortran 95 for parallel processing. A Co-Array Fortran program is interpreted as if it were replicated a number of times and all copies were executed asynchronously. Each copy has its own set of data objects and is termed an image. The array syntax of Fortran 95 is extended with additional trailing subscripts in square brackets to give a clear and straightforward representation of any access to data that is spread across images. References without square brackets are to local data, so code that can run independently is uncluttered. Only where there are square brackets, or where there is a procedure call and the procedure contains square brackets, is communication between images involved. There are intrinsic procedures to synchronize images, return the number of images, and return the index of the current image. We introduce the extension; give examples to illustrate how clear, powerful, and flexible it can be; and provide a technical definition. Categories and subject descriptors: D.3 [PROGRAMMING LANGUAGES]. General Terms: Parallel programming. Additional Key Words and Phrases: Fortran. Department for Computation and Information, Rutherford Appleton Laboratory, Oxon OX11 0QX, UK August 1998. 1 Available by anonymous ftp from matisa.cc.rl.ac.uk in directory pub/reports in the file nrRAL98060.ps.gz 2 Silicon Graphics, Inc., 655 Lone Oak Drive, Eagan, MN 55121, USA. Email: