Implementation of the Fizeau Aether Drag Experiment for An
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Michelson–Morley Experiment
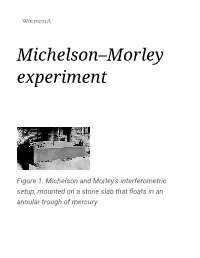
Michelson–Morley experiment Figure 1. Michelson and Morley's interferometric setup, mounted on a stone slab that floats in an annular trough of mercury The Michelson–Morley experiment was an attempt to detect the existence of the luminiferous aether, a supposed medium permeating space that was thought to be the carrier of light waves. The experiment was performed between April and July 1887 by Albert A. Michelson and Edward W. Morley at what is now Case Western Reserve University in Cleveland, Ohio, and published in November of the same year.[1] It compared the speed of light in perpendicular directions in an attempt to detect the relative motion of matter through the stationary luminiferous aether ("aether wind"). The result was negative, in that Michelson and Morley found no significant difference between the speed of light in the direction of movement through the presumed aether, and the speed at right angles. This result is generally considered to be the first strong evidence against the then-prevalent aether theory, and initiated a line of research that eventually led to special relativity, which rules out a stationary aether.[A 1] Of this experiment, Einstein wrote, "If the Michelson–Morley experiment had not brought us into serious embarrassment, no one would have regarded the relativity theory as a (halfway) redemption."[A 2]:219 Michelson–Morley type experiments have been repeated many times with steadily increasing sensitivity. These include experiments from 1902 to 1905, and a series of experiments in the 1920s. More recent optical -

Michou Interferometer
July 21st 2016 Michou interferometer Costel Munteanu Montreal, QC, Canada [email protected] Abstract: The speed of light c defined as a constant of nature is in fact the “twoway speed of light” calculated from the measured time of travel of light from a light source to a reflector and back to a detector situated next to the source. In a “twoway” experiment (like FizeauFoucault apparatus) the constant c is the harmonic mean of “forward” and “backward” speeds [13]. A simple MichelsonMorley interferometer with equal length arms detects a difference between the time of travel of light along its two perpendicular arms in certain frames of reference in motion or in gravitational field and this is interpreted as Lorentz–FitzGerald contraction of length in the direction of motion or along the gradient of gravitational field [5]. While no experiment seemed to allow the precise “oneway” measurement of speed of light, LorentzFitzGerald length contraction interpretation is preferred. In this article I present an interferometer that determines the difference between “forward” and “backward” speed of light in certain frames of reference the anisotropy of speed of light along one direction showing a flow of electromagnetic medium through the frame of reference of the device contradicting the LorentzFitzGerald length contraction hypothesis and bring proof for the first time of (local) preferred frame effects. The device determines the direction of the flow and allows to calculate the velocity of that flow using the measured (or calculated) value of canonical “twoway” speed of light c in that particular frame of reference and the anisotropy measured by the device presented herein. -

The Fizeau Experiment – the Experiment That Led Physics the Wrong Path for One Century
The Fizeau Experiment – the Experiment that Led Physics the Wrong Path for One Century Henok Tadesse, Electrical Engineer, BSc. Ethiopia, Debrezeit, P.O Box 412 Mobile: +251 910 751339; email: [email protected] or [email protected] 01December 2017 Abstract Although Fresnel's ether drag coefficient was ad hoc, its curious confirmation by the Fizeau experiment forced physicists to accept and adopt it as the main guide in the development of theories of the speed of light. Lorentz's 'local-time' , which evolved into the Lorentz transformations, was developed to explain the Fizeau experiment and stellar aberration. Given the logical, theoretical and experimental counter- evidences against the theory of relativity today, it turns out that the Fresnel's drag coefficient may not exist at all. The Fizeau experiment and the phenomenon of stellar aberration have no common physical basis. The result of the Fizeau experiment can be explained in a simple, classical way. It is as if nature conspired to lead physicists astray for more than one century. Alternative theories and interpretations for the ether drift experiments and invariance of Maxwell's equations will be proposed. Physicists rightly assumed the invariance of Maxwell's equations, but their deeply flawed conception of light as ordinary local phenomenon led them unnecessarily to seek an 'explanation' for this invariance, which was the Lorentz transformation. Einstein went down the wrong path when he sought an 'explanation' for the light postulate, when none was needed. The invariance of Maxwell's equations for light is a direct consequence of non-existence of the ether and there is no explanation for it for the same reason that there is no explanation for light being a wave when there is no medium for its propagation. -

The Concept of Field in the History of Electromagnetism
The concept of field in the history of electromagnetism Giovanni Miano Department of Electrical Engineering University of Naples Federico II ET2011-XXVII Riunione Annuale dei Ricercatori di Elettrotecnica Bologna 16-17 giugno 2011 Celebration of the 150th Birthday of Maxwell’s Equations 150 years ago (on March 1861) a young Maxwell (30 years old) published the first part of the paper On physical lines of force in which he wrote down the equations that, by bringing together the physics of electricity and magnetism, laid the foundations for electromagnetism and modern physics. Statue of Maxwell with its dog Toby. Plaque on E-side of the statue. Edinburgh, George Street. Talk Outline ! A brief survey of the birth of the electromagnetism: a long and intriguing story ! A rapid comparison of Weber’s electrodynamics and Maxwell’s theory: “direct action at distance” and “field theory” General References E. T. Wittaker, Theories of Aether and Electricity, Longam, Green and Co., London, 1910. O. Darrigol, Electrodynamics from Ampère to Einste in, Oxford University Press, 2000. O. M. Bucci, The Genesis of Maxwell’s Equations, in “History of Wireless”, T. K. Sarkar et al. Eds., Wiley-Interscience, 2006. Magnetism and Electricity In 1600 Gilbert published the “De Magnete, Magneticisque Corporibus, et de Magno Magnete Tellure” (On the Magnet and Magnetic Bodies, and on That Great Magnet the Earth). ! The Earth is magnetic ()*+(,-.*, Magnesia ad Sipylum) and this is why a compass points north. ! In a quite large class of bodies (glass, sulphur, …) the friction induces the same effect observed in the amber (!"#$%&'(, Elektron). Gilbert gave to it the name “electricus”. -

Speed Limit: How the Search for an Absolute Frame of Reference in the Universe Led to Einstein’S Equation E =Mc2 — a History of Measurements of the Speed of Light
Journal & Proceedings of the Royal Society of New South Wales, vol. 152, part 2, 2019, pp. 216–241. ISSN 0035-9173/19/020216-26 Speed limit: how the search for an absolute frame of reference in the Universe led to Einstein’s equation 2 E =mc — a history of measurements of the speed of light John C. H. Spence ForMemRS Department of Physics, Arizona State University, Tempe AZ, USA E-mail: [email protected] Abstract This article describes one of the greatest intellectual adventures in the history of mankind — the history of measurements of the speed of light and their interpretation (Spence 2019). This led to Einstein’s theory of relativity in 1905 and its most important consequence, the idea that matter is a form of energy. His equation E=mc2 describes the energy release in the nuclear reactions which power our sun, the stars, nuclear weapons and nuclear power stations. The article is about the extraordinarily improbable connection between the search for an absolute frame of reference in the Universe (the Aether, against which to measure the speed of light), and Einstein’s most famous equation. Introduction fixed speed with respect to the Aether frame n 1900, the field of physics was in turmoil. of reference. If we consider waves running IDespite the triumphs of Newton’s laws of along a river in which there is a current, it mechanics, despite Maxwell’s great equations was understood that the waves “pick up” the leading to the discovery of radio and Boltz- speed of the current. But Michelson in 1887 mann’s work on the foundations of statistical could find no effect of the passing Aether mechanics, Lord Kelvin’s talk1 at the Royal wind on his very accurate measurements Institution in London on Friday, April 27th of the speed of light, no matter in which 1900, was titled “Nineteenth-century clouds direction he measured it, with headwind or over the dynamical theory of heat and light.” tailwind. -

Apparatus Named After Our Academic Ancestors, III
Digital Kenyon: Research, Scholarship, and Creative Exchange Faculty Publications Physics 2014 Apparatus Named After Our Academic Ancestors, III Tom Greenslade Kenyon College, [email protected] Follow this and additional works at: https://digital.kenyon.edu/physics_publications Part of the Physics Commons Recommended Citation “Apparatus Named After Our Academic Ancestors III”, The Physics Teacher, 52, 360-363 (2014) This Article is brought to you for free and open access by the Physics at Digital Kenyon: Research, Scholarship, and Creative Exchange. It has been accepted for inclusion in Faculty Publications by an authorized administrator of Digital Kenyon: Research, Scholarship, and Creative Exchange. For more information, please contact [email protected]. Apparatus Named After Our Academic Ancestors, III Thomas B. Greenslade Jr. Citation: The Physics Teacher 52, 360 (2014); doi: 10.1119/1.4893092 View online: http://dx.doi.org/10.1119/1.4893092 View Table of Contents: http://scitation.aip.org/content/aapt/journal/tpt/52/6?ver=pdfcov Published by the American Association of Physics Teachers Articles you may be interested in Crystal (Xal) radios for learning physics Phys. Teach. 53, 317 (2015); 10.1119/1.4917450 Apparatus Named After Our Academic Ancestors — II Phys. Teach. 49, 28 (2011); 10.1119/1.3527751 Apparatus Named After Our Academic Ancestors — I Phys. Teach. 48, 604 (2010); 10.1119/1.3517028 Physics Northwest: An Academic Alliance Phys. Teach. 45, 421 (2007); 10.1119/1.2783150 From Our Files Phys. Teach. 41, 123 (2003); 10.1119/1.1542054 This article is copyrighted as indicated in the article. Reuse of AAPT content is subject to the terms at: http://scitation.aip.org/termsconditions. -
Project Physics Reader 4, Light and Electromagnetism
DOM/KEITRESUME ED 071 897 SE 015 534 TITLE Project Physics Reader 4,Light and Electromagnetism. INSTITUTION Harvard 'Jail's, Cambridge,Mass. Harvard Project Physics. SPONS AGENCY Office of Education (DREW), Washington, D.C. Bureau of Research. BUREAU NO BR-5-1038 PUB DATE 67 CONTRACT 0M-5-107058 NOTE . 254p.; preliminary Version EDRS PRICE MF-$0.65 HC-49.87 DESCRIPTORS Electricity; *Instructional Materials; Li ,t; Magnets;, *Physics; Radiation; *Science Materials; Secondary Grades; *Secondary School Science; *Supplementary Reading Materials IDENTIFIERS Harvard Project Physics ABSTRACT . As a supplement to Project Physics Unit 4, a collection. of articles is presented.. in this reader.for student browsing. The 21 articles are. included under the ,following headings: _Letter from Thomas Jefferson; On the Method of Theoretical Physics; Systems, Feedback, Cybernetics; Velocity of Light; Popular Applications of.Polarized Light; Eye and Camera; The laser--What it is and Doe0; A .Simple Electric Circuit: Ohmss Law; The. Electronic . Revolution; The Invention of the Electric. Light; High Fidelity; The . Future of Current Power Transmission; James Clerk Maxwell, ., Part II; On Ole Induction of Electric Currents; The Relationship of . Electricity and Magnetism; The Electromagnetic Field; Radiation Belts . .Around the Earth; A .Mirror for the Brain; Scientific Imagination; Lenses and Optical Instruments; and "Baffled!." Illustrations for explanation use. are included. The work of Harvard. roject Physics haS ...been financially supported by: the Carnegie Corporation ofNew York, the_ Ford Foundations, the National Science Foundation.the_Alfred P. Sloan Foundation, the. United States Office of Education, and Harvard .University..(CC) Project Physics Reader An Introduction to Physics Light and Electromagnetism U S DEPARTMENT OF HEALTH. -

Reading Materials on EM Waves and Polarized Light
22-1 Maxwell’s Equations In the 19th century, many scientists were making important contributions to our understanding of electricity, magnetism, and optics. For instance, the Danish scientist Hans Christian Ørsted and the French physicist André-Marie Ampère demonstrated that electricity and magnetism were related and could be considered part of one field, electromagnetism. A number of other physicists, including England’s Thomas Young and France’s Augustin-Jean Fresnel, showed how light behaved as a wave. For the most part, however, electromagnetism and optics were viewed as separate phenomena. James Clerk Maxwell was a Scottish physicist who lived from 1831 – 1879. Maxwell advanced physics in a number of ways, but his crowning achievement was the manner in which he showed how electricity, magnetism, and optics are inextricably linked. Maxwell did this, in part, by writing out four deceptively simple equations. Physicists love simplicity and symmetry. To a physicist, it is hard to beat the beauty of Maxwell’s equations, shown in Figure 22.1. To us, they might appear to be somewhat imposing, because they require a knowledge of calculus to fully comprehend them. These four equations are immensely powerful, however. Together, they hold the key to understanding much of what is covered in this book in Chapters 16 – 20, as well as Chapters 22 and 25. Seven chapters boiled down to four equations. Think how much work we would have saved if we had just started with Maxwell’s equations instead, assuming we understood all their implications immediately. rrr Qdr Φ Equation 1: EdA•=Equation 3: Edl •=− B term added ∫∫ε dt by Maxwell 0 rrr r dΦ Equation 2: BdA•=0 Equation 4: Bdl •=µµε I + E ∫∫000enclosed dt Figure 22.1: Maxwell’s equations. -

Unit 7: Manipulating Light
Unit 7: Manipulating Light Unit Overview This unit continues to develop the theme of the practical and foundational effects of quantum mechanics. It focuses on the experimental achievements in reducing the speed of light by factors of tens of millions and covers some of the implications of that research. The first section emphasizes the critical role that the speed of light in a vacuum plays in our understanding of our universe. It also outlines the "natural" way of slowing light by small amounts by passing it through materials of different refractive indices. Section 3 then details the type of experimental setup used to slow down light "artificially" in the laboratory and analyzes the fundamental quantum processes that permit physicists to reduce light's speed to that of a cyclist—and even to stop light altogether and hold it in storage. Next, Section 7 covers methods of converting light into matter and back again. And finally, Section 8 points out various applications, real and potential, of the increasing ability to manipulate light. Content for This Unit Sections: 1. Introduction.............................................................................................................. 2 2. Measuring and Manipulating the Speed of Light ................................................... 4 3. A Sound Design for Slowing Light .........................................................................7 4. Making an Optical Molasses.................................................................................11 5. Slowing Light: Lasers -

Critique of Special Relativity (Prp-1)
CRITIQUE OF SPECIAL RELATIVITY (PRP-1) INTRODUCTION In 1887 Michelson and Morley attempted to measure the ether drift caused by the motion of the earth (at 30 km/s) in its orbit around the sun. The null result surprised everybody and for 18 years physicists tried unsuccessfully to explain the enigma. Finally, in 1905, Einstein published his revolutionary Special Theory of Relativity (STR) which rejected the ether and was quite controversial. It survived because a better solution has never been found. This may now gradually be changing. The present “Critique of Special Relativity” (PRP-1) is the first in a series of papers about “Post-Relativity Physics” (PRP). It is organized in 3 parts: Part I discusses alternative solutions in PRP for experiments and observation explained by STR. Part II discusses false arguments in favor of Special Relativity. It shows how the Sagnac effect and the GPS system have a natural explanation in classical physics, thus eliminating the need for alternative explanations in Relativity. In addition it shows that the proposed alternatives cannot work due to a fundamental flaw in Special Relativity so that the Sagnac effect and the GPS system actually disprove Relativity. Part III discusses experiments and observations which clearly disprove Special Relativity. PART I - ALTERNATIVE SOLUTIONS IN PRP FOR EXPERIMENTS EXPLAINED IN STR 1. THE ASSUMPTION OF ATOMIC RESONANCE CONTRACTION (ARC) Atomic Resonance Contraction (ARC) is a surprisingly simple alternative to STR’s kinematics. If we assume that atoms and therefore all solid objects contract by a factor 1/γ 2 in the direction of motion through the ether and by a factor 1/γ perpendicular to that motion (where γ = 1/(1-β2)1/2 with β = vc/ ) most ether drift experiments can easily be explained in classical physics. -

The Short History of Science
PHYSICS FOUNDATIONS SOCIETY THE FINNISH SOCIETY FOR NATURAL PHILOSOPHY PHYSICS FOUNDATIONS SOCIETY THE FINNISH SOCIETY FOR www.physicsfoundations.org NATURAL PHILOSOPHY www.lfs.fi Dr. Suntola’s “The Short History of Science” shows fascinating competence in its constructively critical in-depth exploration of the long path that the pioneers of metaphysics and empirical science have followed in building up our present understanding of physical reality. The book is made unique by the author’s perspective. He reflects the historical path to his Dynamic Universe theory that opens an unparalleled perspective to a deeper understanding of the harmony in nature – to click the pieces of the puzzle into their places. The book opens a unique possibility for the reader to make his own evaluation of the postulates behind our present understanding of reality. – Tarja Kallio-Tamminen, PhD, theoretical philosophy, MSc, high energy physics The book gives an exceptionally interesting perspective on the history of science and the development paths that have led to our scientific picture of physical reality. As a philosophical question, the reader may conclude how much the development has been directed by coincidences, and whether the picture of reality would have been different if another path had been chosen. – Heikki Sipilä, PhD, nuclear physics Would other routes have been chosen, if all modern experiments had been available to the early scientists? This is an excellent book for a guided scientific tour challenging the reader to an in-depth consideration of the choices made. – Ari Lehto, PhD, physics Tuomo Suntola, PhD in Electron Physics at Helsinki University of Technology (1971). -

Albert Einstein and the Fizeau 1851 Water Tube Experiment
Albert Einstein and the Fizeau 1851 Water Tube Experiment Galina Weinstein In 1895 Hendrik Antoon Lorentz derived the Fresnel dragging coefficient in his theory of immobile ether and electrons. This derivation did not explicitly involve electromagnetic theory at all. According to the 1922 Kyoto lecture notes, before 1905 Einstein tried to discuss Fizeau's experiment "as originally discussed by Lorentz" (in 1895). At this time he was still under the impression that the ordinary Newtonian law of addition of velocities was unproblematic. In 1907 Max Laue showed that the Fresnel dragging coefficient would follow from a straightforward application of the relativistic addition theorem of velocities. This derivation is mathematically equivalent to Lorentz's derivation of 1895. From 1907 onwards Einstein adopted Laue's derivation. When Robert Shankland asked Einstein how he had learned of the Michelson-Morley experiment, Einstein told him that he had become aware of it through the writings of Lorentz, but only after 1905 had it come to his attention. "Otherwise", he said, "I would have mentioned it in my paper". He continued to say that the experimental results which had influenced him most were stellar aberration and Fizeau's water tube experiment. "They were enough". Indeed the famous Michelson-Morley experiment is not mentioned in the 1905 relativity paper; but curiously Einstein did not mention Fizeau's experimental result either, and this is puzzling in light of the importance of the experiment in Einstein's pathway to his theory. In this paper I try to discuss this question. 1. Fizeau's Water Tube Experiment of 1851 In 1818 Augustin Fresnel explained that the motion of the earth does not have any influence on the laws of refraction because the ether is partially carried along by the earth and light waves inside the optical medium are partially dragged along with the ether.