Aeronautics of the Space Shuttle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The SKYLON Spaceplane
The SKYLON Spaceplane Borg K.⇤ and Matula E.⇤ University of Colorado, Boulder, CO, 80309, USA This report outlines the major technical aspects of the SKYLON spaceplane as a final project for the ASEN 5053 class. The SKYLON spaceplane is designed as a single stage to orbit vehicle capable of lifting 15 mT to LEO from a 5.5 km runway and returning to land at the same location. It is powered by a unique engine design that combines an air- breathing and rocket mode into a single engine. This is achieved through the use of a novel lightweight heat exchanger that has been demonstrated on a reduced scale. The program has received funding from the UK government and ESA to build a full scale prototype of the engine as it’s next step. The project is technically feasible but will need to overcome some manufacturing issues and high start-up costs. This report is not intended for publication or commercial use. Nomenclature SSTO Single Stage To Orbit REL Reaction Engines Ltd UK United Kingdom LEO Low Earth Orbit SABRE Synergetic Air-Breathing Rocket Engine SOMA SKYLON Orbital Maneuvering Assembly HOTOL Horizontal Take-O↵and Landing NASP National Aerospace Program GT OW Gross Take-O↵Weight MECO Main Engine Cut-O↵ LACE Liquid Air Cooled Engine RCS Reaction Control System MLI Multi-Layer Insulation mT Tonne I. Introduction The SKYLON spaceplane is a single stage to orbit concept vehicle being developed by Reaction Engines Ltd in the United Kingdom. It is designed to take o↵and land on a runway delivering 15 mT of payload into LEO, in the current D-1 configuration. -

Glider Handbook, Chapter 2: Components and Systems
Chapter 2 Components and Systems Introduction Although gliders come in an array of shapes and sizes, the basic design features of most gliders are fundamentally the same. All gliders conform to the aerodynamic principles that make flight possible. When air flows over the wings of a glider, the wings produce a force called lift that allows the aircraft to stay aloft. Glider wings are designed to produce maximum lift with minimum drag. 2-1 Glider Design With each generation of new materials and development and improvements in aerodynamics, the performance of gliders The earlier gliders were made mainly of wood with metal has increased. One measure of performance is glide ratio. A fastenings, stays, and control cables. Subsequent designs glide ratio of 30:1 means that in smooth air a glider can travel led to a fuselage made of fabric-covered steel tubing forward 30 feet while only losing 1 foot of altitude. Glide glued to wood and fabric wings for lightness and strength. ratio is discussed further in Chapter 5, Glider Performance. New materials, such as carbon fiber, fiberglass, glass reinforced plastic (GRP), and Kevlar® are now being used Due to the critical role that aerodynamic efficiency plays in to developed stronger and lighter gliders. Modern gliders the performance of a glider, gliders often have aerodynamic are usually designed by computer-aided software to increase features seldom found in other aircraft. The wings of a modern performance. The first glider to use fiberglass extensively racing glider have a specially designed low-drag laminar flow was the Akaflieg Stuttgart FS-24 Phönix, which first flew airfoil. -
Problems of High Speed and Altitude Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018
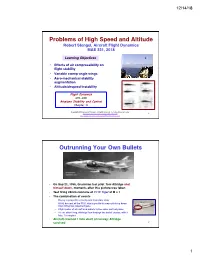
12/14/18 Problems of High Speed and Altitude Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018 Learning Objectives • Effects of air compressibility on flight stability • Variable sweep-angle wings • Aero-mechanical stability augmentation • Altitude/airspeed instability Flight Dynamics 470-480 Airplane Stability and Control Chapter 11 Copyright 2018 by Robert Stengel. All rights reserved. For educational use only. http://www.princeton.edu/~stengel/MAE331.html 1 http://www.princeton.edu/~stengel/FlightDynamics.html Outrunning Your Own Bullets • On Sep 21, 1956, Grumman test pilot Tom Attridge shot himself down, moments after this picture was taken • Test firing 20mm cannons of F11F Tiger at M = 1 • The combination of events – Decay in projectile velocity and trajectory drop – 0.5-G descent of the F11F, due in part to its nose pitching down from firing low-mounted guns – Flight paths of aircraft and bullets in the same vertical plane – 11 sec after firing, Attridge flew through the bullet cluster, with 3 hits, 1 in engine • Aircraft crashed 1 mile short of runway; Attridge survived 2 1 12/14/18 Effects of Air Compressibility on Flight Stability 3 Implications of Air Compressibility for Stability and Control • Early difficulties with compressibility – Encountered in high-speed dives from high altitude, e.g., Lockheed P-38 Lightning • Thick wing center section – Developed compressibility burble, reducing lift-curve slope and downwash • Reduced downwash – Increased horizontal stabilizer effectiveness – Increased static stability – Introduced -

ICE PROTECTION Incomplete
ICE PROTECTION GENERAL The Ice and Rain Protection Systems allow the aircraft to operate in icing conditions or heavy rain. Aircraft Ice Protection is provided by heating in critical areas using either: Hot Air from the Pneumatic System o Wing Leading Edges o Stabilizer Leading Edges o Engine Air Inlets Electrical power o Windshields o Probe Heat . Pitot Tubes . Pitot Static Tube . AOA Sensors . TAT Probes o Static Ports . ADC . Pressurization o Service Nipples . Lavatory Water Drain . Potable Water Rain removal from the Windshields is provided by two fully independent Wiper Systems. LEADING EDGE THERMAL ANTI ICE SYSTEM Ice protection for the wing and horizontal stabilizer leading edges and the engine air inlet lips is ensured by heating these surfaces. Hot air supplied by the Pneumatic System is ducted through perforated tubes, called Piccolo tubes. Each Piccolo tube is routed along the surface, so that hot air jets flowing through the perforations heat the surface. Dedicated slots are provided for exhausting the hot air after the surface has been heated. Each subsystem has a pressure regulating/shutoff valve (PRSOV) type of Anti-icing valve. An airflow restrictor limits the airflow rate supplied by the Pneumatic System. The systems are regulated for proper pressure and airflow rate. Differential pressure switches and low pressure switches monitor for leakage and low pressures. Each Wing's Anti Ice System is supplied by its respective side of the Pneumatic System. The Stabilizer Anti Ice System is supplied by the LEFT side of the Pneumatic System. The APU cannot provide sufficient hot air for Pneumatic Anti Ice functions. -

Initial Investigation of Reaction Control System Design on Spacecraft Handling Qualities for Earth Orbit Docking
Initial Investigation of Reaction Control System Design on Spacecraft Handling Qualities for Earth Orbit Docking Randall E. Bailey1 E. Bruce Jackson,2 and Kenneth H. Goodrich 3 NASA Langley Research Center, Hampton, Virginia, 23681 W. Al Ragsdale4, and Jason Neuhaus 5 Unisys Corporation, Hampton, VA, 23681 and Jim Barnes6 ARINC, Hampton, VA, 23666 A program of research, development, test, and evaluation is planned for the development of Spacecraft Handling Qualities guidelines. In this first experiment, the effects of Reaction Control System design characteristics and rotational control laws were evaluated during simulated proximity operations and docking. Also, the influence of piloting demands resulting from varying closure rates was assessed. The pilot-in-the-loop simulation results showed that significantly different spacecraft handling qualities result from the design of the Reaction Control System. In particular, cross-coupling between translational and rotational motions significantly affected handling qualities as reflected by Cooper-Harper pilot ratings and pilot workload, as reflected by Task-Load Index ratings. This influence is masked – but only slightly – by the rotational control system mode. While rotational control augmentation using Rate Command Attitude Hold can reduce the workload (principally, physical workload) created by cross-coupling, the handling qualities are not significantly improved. The attitude and rate deadbands of the RCAH introduced significant mental workload and control compensation to evaluate when deadband firings would occur, assess their impact on docking performance, and apply control inputs to mitigate that impact. I. Introduction Handling qualities embody “those qualities or characteristics of an aircraft that govern the ease and precision with which a pilot is able to perform the tasks required in support of an aircraft role."1 These same qualities are as critical, if not more so, in the operation of spacecraft. -

Solar Orbiter Assessment Study and Model Payload
Solar Orbiter assessment study and model payload N.Rando(1), L.Gerlach(2), G.Janin(4), B.Johlander(1), A.Jeanes(1), A.Lyngvi(1), R.Marsden(3), A.Owens(1), U.Telljohann(1), D.Lumb(1) and T.Peacock(1). (1) Science Payload & Advanced Concepts Office, (2) Electrical Engineering Department, (3) Research and Scientific Support Department, European Space Agency, ESTEC, Postbus 299, NL-2200AG, Noordwijk, The Netherlands (4) Mission Analysis Office, European Space Agency, ESOC, Darmstadt, Germany ABSTRACT The Solar Orbiter mission is presently in assessment phase by the Science Payload and Advanced Concepts Office of the European Space Agency. The mission is confirmed in the Cosmic Vision programme, with the objective of a launch in October 2013 and no later than May 2015. The Solar Orbiter mission incorporates both a near-Sun (~0.22 AU) and a high-latitude (~ 35 deg) phase, posing new challenges in terms of protection from the intense solar radiation and related spacecraft thermal control, to remain compatible with the programmatic constraints of a medium class mission. This paper provides an overview of the assessment study activities, with specific emphasis on the definition of the model payload and its accommodation in the spacecraft. The main results of the industrial activities conducted with Alcatel Space and EADS-Astrium are summarized. Keywords: Solar physics, space weather, instrumentation, mission assessment, Solar Orbiter 1. INTRODUCTION The Solar Orbiter mission was first discussed at the Tenerife “Crossroads” workshop in 1998, in the framework of the ESA Solar Physics Planning Group. The mission was submitted to ESA in 2000 and then selected by ESA’s Science Programme Committee in October 2000 to be implemented as a flexi-mission, with a launch envisaged in the 2008- 2013 timeframe (after the BepiColombo mission to Mercury) [1]. -
A Free Spacecraft Simulation Tool
Orbiter: AFreeSpacecraftSimulationTool MartinSchweiger DepartmentofComputerScience UniversityCollegeLondon www.orbitersim.com 2nd ESAWorkshoponAstrodynamics ToolsandTechniques ESTEC,Noordwijk 13-15September2004 Contents • Overview • Scope • Limitations • SomeOrbiterfeatures: • Timepropagation • Gravitycalculation • Rigid-bodymodelandsuperstructures • OrbiterApplicationProgrammingInterface: • Concept • Orbiterinstrumentation • TheVESSELinterfaceclass • Newfeatures: • Air-breatingengines:scramjetdesign • Virtualcockpits • Newvisualeffects • Orbiterasateachingtool • Summaryandfutureplans • Demonstration Overview · Orbiterisareal-timespaceflightsimulationforWindowsPC platforms. · Modellingofatmosphericflight(launchandreentry), suborbital,orbitalandinterplanetarymissions(rendezvous, docking,transfer,swing-byetc.) · Newtonianmechanics,rigidbodymodelofrotation,basic atmosphericflightmodel. · Planetpositionsfrompublicperturbationsolutions.Time integrationofstatevectorsorosculatingelements. · Developedsince2000asaneducationalandrecreational applicationfororbitalmechanicssimulation. · WritteninC++,usingDirectXfor3-Drendering.Public programminginterfacefordevelopmentofexternalmodule plugins. · WithanincreasinglyversatileAPI,developmentfocusis beginningtoshiftfromtheOrbitercoreto3rd partyaddons. Scope · Launchsequencefromsurfacetoorbitalinsertion(including atmosphericeffects:drag,pressure-dependentengineISP...) · Orbitalmanoeuvres(alignmentoforbitalplane,orbit-to-orbit transfers,rendezvous) · Vessel-to-vesselapproachanddocking.Buildingof superstructuresfromvesselmodules(includingsimplerules -

V-Tails for Aeromodels
Please see the V-Tails for Aeromodels recommendations for Yet Another Attempt to Explain Them the browser settings Watching the RCSE forum during November 1998 I felt, that the discussion on V-tails is not always governed by facts and knowledge, but feelings and sometimes even by irritation. I think, some theory of V-tails should be compiled and written down for aeromodellers such that we can answer most of the questions by ourselves. V- tails are almost never used with full scale airplanes but not all of the reasons for this are also valid for aeromodels. As a consequence V-tails are not treated appropriately in standard literature. This article contains well known and also some not so well known facts on V-tails and theoretical explanations for them; I don't claim anything to be "new". I also list some occasionally to be heard statements, which are simply not true. If something is wrong or missing: Please let me know ([email protected]), or, if you think that this article is a valuable contribution to make V- tails clearer for aeromodellers. Introduction Almost always designing a V-tail means converting a standard tail into a V-tail; the reasons are clear: Calculations yield specifications of a standard tail or an existing model is really to be converted (the photo above documents the end of the 2nd life of this glider;-). The task is to find a V-tail, which behaves "exactly like its corresponding" standard- or T-tail - we will see, that this is not possible. We can design the V-tail to have the same behaviour in many respects, we might get some advantages, but we have to pay a price. -

Preliminary Horizontal and Vertical Stabilizer Design, Longitudinal and Directional Static Stability
MSD : SAE Aero Aircraft Design & Build Preliminary Horizontal and Vertical Stabilizer Design, Longitudinal and Directional Static Stability Horizontal Stabilizer Parameters: 1. Ratio of horizontal tail-wing aerodynamic centers distance with respect to fuselage length 푙푎푐 /푙푓 2. Overall fuselage length 푙푓 3. Horizontal tail-wing aerodynamic centers distance 푙푎푐 4. Horizontal tail volume coefficient 푉퐻 5. Center of gravity location 푥푐푔 6. Horizontal tail arm 푙푡 7. Horizontal tail planform area 푆푡 8. Horizontal tail airfoil 9. Horizontal tail aspect ratio 퐴푅푡 10. Horizontal tail taper ratio 휆푡 11. Additional geometric parameters (Sweep Angle, Twist Angle, Dihedral) 12. Incidence Angle 푖푡 13. Neutral Point 푥푁푃 14. Static Margin 15. Overall Horizontal Stabilizer Geometry 16. Overall Aircraft Static Longitudinal Stability 17. Elevator (TBD in Control Surfaces Design) Vertical Stabilizer Parameters: 18. Vertical tail volume coefficient 푉푣 19. Vertical tail arm 푙푣 20. Vertical tail planform area 푆푉 21. Vertical tail aspect ratio 퐴푅푣 22. Vertical tail span 푏푣 23. Vertical tail sweep angle Λ푣 24. Vertical tail minimum lift curve slope 퐶 퐿훼 푣 25. Vertical tail airfoil 26. Overall Vertical Stabilizer Geometry 27. Overall Aircraft Static Direction Stability 28. Rudder (TBD in Control Surfaces Design) 1. l/Lf Ratio: 0.6 The table below shows statistical ratios between the distance between the wing aerodynamic center and the horizontal tail aerodynamic center 푙푎푐 with respect to the overall fuselage length (Lf). 2. Fuselage Length (Lf): 60.00 in Choosing this value is an iterative process to meet longitudinal and vertical static stability, internal storage, and center of gravity requirements, but preliminarily choose 푙푓 = 60.00 푖푛 3. -

NASA Ares I Launch Vehicle Roll and Reaction Control Systems Design Status
https://ntrs.nasa.gov/search.jsp?R=20090037058 2019-08-30T08:10:16+00:00Z NASA Ares I Launch Vehicle Roll and Reaction Control Systems Design Status 1 Adam Butt and Chris G. Popp2 NASA George C. Marshall Space Flight Center, Huntsville, AL, 35812 Hank M. Pitts3 Qualis Corporation, ESTS Group, Huntsville, AL, 35812 and David J. Sharp4 Jacobs Engineering, ESTS Group, Huntsville, AL, 35812 This paper provides an update of design status following the Preliminary Design Review of NASA’s Ares I First Stage Roll and Upper Stage Reaction Control Systems. The Ares I launch vehicle is the selected design, chosen to return humans to the moon, mars, and beyond. It consists of a first stage five segment solid rocket booster and an upper stage liquid bi-propellant J-2X engine. Similar to many launch vehicles, the Ares I has reaction control systems used to provide the vehicle with three degrees of freedom stabilization during the mission. During launch, the First Stage Roll Control System will provide the Ares I with the ability to counteract induced roll torque. After first stage booster separation, the Upper Stage Reaction Control System will provide the upper stage element with three degrees of freedom control as needed. Trade studies and design assessments conducted on the roll and reaction control systems include: propellant selection, thruster arrangement, pressurization system configuration, system component trades, and more. Since successful completion of the Preliminary Design Review, work has progressed towards the Critical Design Review with accomplishments made in the following areas: pressurant/propellant tanks, thruster assemblies, component configurations, as well as thruster module designs, and waterhammer mitigation approaches. -

Actuator Saturation Analysis of a Fly-By-Wire Control System for a Delta-Canard Aircraft
DEGREE PROJECT IN VEHICLE ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2020 Actuator Saturation Analysis of a Fly-By-Wire Control System for a Delta-Canard Aircraft ERIK LJUDÉN KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF ENGINEERING SCIENCES Author Erik Ljudén <[email protected]> School of Engineering Sciences KTH Royal Institute of Technology Place Linköping, Sweden Saab Examiner Ulf Ringertz Stockholm KTH Royal Institute of Technology Supervisor Peter Jason Linköping Saab Abstract Actuator saturation is a well studied subject regarding control theory. However, little research exist regarding aircraft behavior during actuator saturation. This paper aims to identify flight mechanical parameters that can be useful when analyzing actuator saturation. The studied aircraft is an unstable delta-canard aircraft. By varying the aircraft’s center-of- gravity and applying a square wave input in pitch, saturated actuators have been found and investigated closer using moment coefficients as well as other flight mechanical parameters. The studied flight mechanical parameters has proven to be highly relevant when analyzing actuator saturation, and a simple connection between saturated actuators and moment coefficients has been found. One can for example look for sudden changes in the moment coefficients during saturated actuators in order to find potentially dangerous flight cases. In addition, the studied parameters can be used for robustness analysis, but needs to be further investigated. Lastly, the studied pitch square wave input shows no risk of aircraft departure with saturated elevons during flight, provided non-saturated canards, and that the free-stream velocity is high enough to be flyable. i Sammanfattning Styrdonsmättning är ett välstuderat ämne inom kontrollteorin. -

Building and Maintaining the International Space Station (ISS)
/ Building and maintaining the International Space Station (ISS) is a very complex task. An international fleet of space vehicles launches ISS components; rotates crews; provides logistical support; and replenishes propellant, items for science experi- ments, and other necessary supplies and equipment. The Space Shuttle must be used to deliver most ISS modules and major components. All of these important deliveries sustain a constant supply line that is crucial to the development and maintenance of the International Space Station. The fleet is also responsible for returning experiment results to Earth and for removing trash and waste from the ISS. Currently, transport vehicles are launched from two sites on transportation logistics Earth. In the future, the number of launch sites will increase to four or more. Future plans also include new commercial trans- ports that will take over the role of U.S. ISS logistical support. INTERNATIONAL SPACE STATION GUIDE TRANSPORTATION/LOGISTICS 39 LAUNCH VEHICLES Soyuz Proton H-II Ariane Shuttle Roscosmos JAXA ESA NASA Russia Japan Europe United States Russia Japan EuRopE u.s. soyuz sL-4 proton sL-12 H-ii ariane 5 space shuttle First launch 1957 1965 1996 1996 1981 1963 (Soyuz variant) Launch site(s) Baikonur Baikonur Tanegashima Guiana Kennedy Space Center Cosmodrome Cosmodrome Space Center Space Center Launch performance 7,150 kg 20,000 kg 16,500 kg 18,000 kg 18,600 kg payload capacity (15,750 lb) (44,000 lb) (36,400 lb) (39,700 lb) (41,000 lb) 105,000 kg (230,000 lb), orbiter only Return performance