Milan Janić Analysis, Modeling, and Evaluation of Performances
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Alta Velocidade Ferroviária Em Portugal
Nuno Filipe Ramos Maranhão Alta Velocidade Ferroviária em Portugal Viabilidade económica do transporte de passageiros nos eixos prioritários Dissertação de Mestrado em Economia apresentada à Faculdade de Economia da Universidade de Coimbra para cumprimento dos requisitos necessários à obtenção do grau de Mestre janeiro de 2014 Nuno Filipe Ramos Maranhão Alta Velocidade Ferroviária em Portugal Viabilidade económica do transporte de passageiros nos eixos prioritários Dissertação de Mestrado em Economia, na especialidade de Economia Industrial, apresentada à Faculdade de Economia da Universidade de Coimbra para obtenção do grau de Mestre Orientador: Prof. Doutor Daniel Murta Coimbra, 2014 Agradecimentos Se o trabalho de projeto é, pela sua finalidade académica, um trabalho individual, há contributos de natureza diversa que não podem e nem devem deixar de ser realçados. Por essa razão, expresso os meus agradecimentos: Aos meus pais José e Maria e ao meu irmão César, pelo inestimável apoio e compreensão que preencheram as diversas falhas que fui tendo, e pela paciência revelada ao longo destes anos. Ao Professor Daniel Murta, meu orientador, pela competência científica e acompanhamento do trabalho, cujas críticas, correções e sugestões valorizei muito. Mas, sobretudo, pela relação de amizade e de proximidade, que espero ter sabido corresponder na dimensão que uma pessoa com a profundidade intelectual do Professor merece. Foi um privilégio. À Professora Adelaide Duarte, professora de Seminário de Investigação, porque genuinamente admiro o interesse que deposita na orientação da cadeira e pela agilidade de compreensão que consegue emprestar à multiplicidade de temas que os alunos tratam nos trabalhos de projeto. Um exemplo de nobreza e de entrega à causa da nossa Faculdade. -

Case of High-Speed Ground Transportation Systems
MANAGING PROJECTS WITH STRONG TECHNOLOGICAL RUPTURE Case of High-Speed Ground Transportation Systems THESIS N° 2568 (2002) PRESENTED AT THE CIVIL ENGINEERING DEPARTMENT SWISS FEDERAL INSTITUTE OF TECHNOLOGY - LAUSANNE BY GUILLAUME DE TILIÈRE Civil Engineer, EPFL French nationality Approved by the proposition of the jury: Prof. F.L. Perret, thesis director Prof. M. Hirt, jury director Prof. D. Foray Prof. J.Ph. Deschamps Prof. M. Finger Prof. M. Bassand Lausanne, EPFL 2002 MANAGING PROJECTS WITH STRONG TECHNOLOGICAL RUPTURE Case of High-Speed Ground Transportation Systems THÈSE N° 2568 (2002) PRÉSENTÉE AU DÉPARTEMENT DE GÉNIE CIVIL ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE PAR GUILLAUME DE TILIÈRE Ingénieur Génie-Civil diplômé EPFL de nationalité française acceptée sur proposition du jury : Prof. F.L. Perret, directeur de thèse Prof. M. Hirt, rapporteur Prof. D. Foray, corapporteur Prof. J.Ph. Deschamps, corapporteur Prof. M. Finger, corapporteur Prof. M. Bassand, corapporteur Document approuvé lors de l’examen oral le 19.04.2002 Abstract 2 ACKNOWLEDGEMENTS I would like to extend my deep gratitude to Prof. Francis-Luc Perret, my Supervisory Committee Chairman, as well as to Prof. Dominique Foray for their enthusiasm, encouragements and guidance. I also express my gratitude to the members of my Committee, Prof. Jean-Philippe Deschamps, Prof. Mathias Finger, Prof. Michel Bassand and Prof. Manfred Hirt for their comments and remarks. They have contributed to making this multidisciplinary approach more pertinent. I would also like to extend my gratitude to our Research Institute, the LEM, the support of which has been very helpful. Concerning the exchange program at ITS -Berkeley (2000-2001), I would like to acknowledge the support of the Swiss National Science Foundation. -

Kiepe Electric Gmbh Training Academy New Generation
– THE – CUSTOMER JULY 2017 GROUP KNORR-BREMSE OF MAGAZINE RAIL SYSTEMS VEHICLE EDITION informer 45 NEWS Kiepe Electric GmbH Electrical traction systems added to portfolio CUSTOMERS + PARTNERS Training Academy Learning from the market leader PRODUCTS + SERVICES New generation VV-T 2.0 oil-free compressor 2 informer | edition 45 | july 2017 | contents editorial 16 New Siemens VELARO TR high-speed trains for Turkey 03 Dr. Peter Radina Member of the Executive Board, 18 Selectron train control systems for the Knorr-Bremse Systeme für Russian GOST market Schienenfahrzeuge GmbH 20 Knorr-Bremse’s involvement in the ”Shift2Rail” European technology initiative news 04 The latest information products + services 22 Running technology monitoring: Enhanced spotlight derailment detection for slab track applications 24 UIC approval for KKLII compact control valve 08 New Knorr-Bremse Development Center 26 Selectron wireless train control technology customers + partners 28 The next generation of oil-free compressors 30 Modern paint shop at IFE manufacturing site 10 Knorr-Bremse RailServices Training Academy in Brno 12 IFE Entrance Systems: Examples of installations for 32 System supplier and full friction range supplier: DB Regio AG, Moscow Metro and Citadis streetcars Optimal friction pairing with Knorr-Bremse 14 iCOM Monitor: The app platform for the rail industry 34 Enhanced door drives from Technologies Lanka E-MZ-0001-EN This publication may be subject to alteration without prior notice. A printed copy of this document may not be the latest revision. Please contact your local Knorr-Bremse representative or check our website www.knorr-bremse.com for the latest update. The figurative mark “K” and the trademarks KNORR and KNORR-BREMSE are registered in the name of Knorr-Bremse AG. -

London to Ipswich
GREAT EASTERN MAIN LINE LONDON TO IPSWICH © Copyright RailSimulator.com 2012, all rights reserved Release Version 1.0 Train Simulator – GEML London Ipswich 1 ROUTE INFORMATIONINFORMATION................................................................................................................................................................................................................... ........................... 444 1.1 History ....................................................................................................................4 1.1.1 Liverpool Street Station ................................................................................................. 5 1.1.2 Electrification................................................................................................................ 5 1.1.3 Line Features ................................................................................................................ 5 1.2 Rolling Stock .............................................................................................................6 1.3 Franchise History .......................................................................................................6 2 CLASS 360 ‘DESIRO’ ELECTRIC MULTIPLE UNUNITITITIT................................................................................... ..................... 777 2.1 Class 360 .................................................................................................................7 2.2 Design & Specification ................................................................................................7 -

Shinkansen - Wikipedia 7/3/20, 10�48 AM
Shinkansen - Wikipedia 7/3/20, 10)48 AM Shinkansen The Shinkansen (Japanese: 新幹線, pronounced [ɕiŋkaꜜɰ̃ seɴ], lit. ''new trunk line''), colloquially known in English as the bullet train, is a network of high-speed railway lines in Japan. Initially, it was built to connect distant Japanese regions with Tokyo, the capital, in order to aid economic growth and development. Beyond long-distance travel, some sections around the largest metropolitan areas are used as a commuter rail network.[1][2] It is operated by five Japan Railways Group companies. A lineup of JR East Shinkansen trains in October Over the Shinkansen's 50-plus year history, carrying 2012 over 10 billion passengers, there has been not a single passenger fatality or injury due to train accidents.[3] Starting with the Tōkaidō Shinkansen (515.4 km, 320.3 mi) in 1964,[4] the network has expanded to currently consist of 2,764.6 km (1,717.8 mi) of lines with maximum speeds of 240–320 km/h (150– 200 mph), 283.5 km (176.2 mi) of Mini-Shinkansen lines with a maximum speed of 130 km/h (80 mph), and 10.3 km (6.4 mi) of spur lines with Shinkansen services.[5] The network presently links most major A lineup of JR West Shinkansen trains in October cities on the islands of Honshu and Kyushu, and 2008 Hakodate on northern island of Hokkaido, with an extension to Sapporo under construction and scheduled to commence in March 2031.[6] The maximum operating speed is 320 km/h (200 mph) (on a 387.5 km section of the Tōhoku Shinkansen).[7] Test runs have reached 443 km/h (275 mph) for conventional rail in 1996, and up to a world record 603 km/h (375 mph) for SCMaglev trains in April 2015.[8] The original Tōkaidō Shinkansen, connecting Tokyo, Nagoya and Osaka, three of Japan's largest cities, is one of the world's busiest high-speed rail lines. -

Transportation Trips, Excursions, Special Journeys, Outings, Tours, and Milestones In, To, from Or Through New Jersey
TRANSPORTATION TRIPS, EXCURSIONS, SPECIAL JOURNEYS, OUTINGS, TOURS, AND MILESTONES IN, TO, FROM OR THROUGH NEW JERSEY Bill McKelvey, Editor, Updated to Mon., Mar. 8, 2021 INTRODUCTION This is a reference work which we hope will be useful to historians and researchers. For those researchers wanting to do a deeper dive into the history of a particular event or series of events, copious resources are given for most of the fantrips, excursions, special moves, etc. in this compilation. You may find it much easier to search for the RR, event, city, etc. you are interested in than to read the entire document. We also think it will provide interesting, educational, and sometimes entertaining reading. Perhaps it will give ideas to future fantrip or excursion leaders for trips which may still be possible. In any such work like this there is always the question of what to include or exclude or where to draw the line. Our first thought was to limit this work to railfan excursions, but that soon got broadened to include rail specials for the general public and officials, special moves, trolley trips, bus outings, waterway and canal journeys, etc. The focus has been on such trips which operated within NJ; from NJ; into NJ from other states; or, passed through NJ. We have excluded regularly scheduled tourist type rides, automobile journeys, air trips, amusement park rides, etc. NOTE: Since many of the following items were taken from promotional literature we can not guarantee that each and every trip was actually operated. Early on the railways explored and promoted special journeys for the public as a way to improve their bottom line. -

Mozdonyok Villamos Motorvonatok Dízel Motorvonatok
1 Katsuta járműfenntartó telep ......... 14 Shinkansen Makuhari járműfenntartó telep ....... 15 Keiyo járműfenntartó telep............ 15 Tokyo járműfenntartó telep ........... 24 Sendai járműfenntartó telep .......... 16 Osaka járműfenntartó telep ........... 25 Mozdonyok Yamagata járműfenntartó telep ...... 16 Asahikawa járműfenntartó telep ...... 3 Morioka járműfenntartó telep ......... 16 Kushiro járműbázis ...................... 3 Akita járműfenntartó telep ............ 16 Hakodate járműfenntartó telep ....... 3 Niigata járműfenntartó telep .......... 17 Matsumoto járműfenntartó telep ..... 17 Nagano egyesített járműbázis ......... 18 Mozdonyok Villamos motorvonatok Kanazawa-Toyama vontatási tph. .... 27 Sapporo járműfenntartó telep ......... 3 Dízel motorvonatok Tsuruga járműfenntartó telep ........ 27 Hakodate járműfenntartó telep ....... 3 Umekoji vontatási telephely .......... 27 Utsunomiya járműfenntartó telep .... 18 Aboshi egyesített járműbázis ......... 27 Takasaki járműfenntartó telep ........ 18 Dízel motorvonatok Fukuchiyama járműfenntartó telep .. 27 Suigun járműfenntartó telep .......... 18 Okayama villamos karbantartó jb. ... 27 Sapporo járműfenntartó telep ......... 3 Makuhari járműfenntartó telep ....... 18 Goto járműfenntartó telep ............ 27 Naebo járműfenntartó telep ........... 3 Kogota járműfenntartó telep .......... 18 Shimonoseki járműfenntartó telep ... 27 Tomakomai járműfenntartó telep .... 4 Koriyama egyesített járműbázis ...... 18 Yamagata járműfenntartó telep ...... 18 Kushiro járműbázis ..................... -
Timetable ▶ Yufuin No Mori / Yufu Can Be Used Freely If They Are Empty
Index ■■ Types of seats ■■ JR KYUSHU Hakata ー Kumamoto ー Kagoshima-Chuo 2 There are two types of seats on JR Kyushu’s ▶ Kyushu Shinkansen trains, “Reserved” and “Non-reserved”. To use a reserved seat, one must make a Hakata ー Yufuin ー Beppu 3 reservation in advance. Non-reserved seats Timetable ▶ Yufuin no Mori / Yufu can be used freely if they are empty. Kumamoto ー Miyaji ー Beppu If you wish to use a reserved seat, please 2020.3.14‐ 2021.2.28 4 ▶ Aso Boy! / Kyushu Odan Tokkyu / Aso purchase a reserved seat ticket from JR Kyushu's ticket offices before boarding. Once Kumamoto ー Misumi ▶4 aboard the train, please follow the guidance A-Train as on the entrance of the train cars* and inside the train to the reserved seat. Kumamoto ー Hitoyoshi 5 ▶ SL Hitoyoshi Please be aware that without a reserved seat ticket, you cannot use a reserved seat. Kumamoto ー Hitoyoshi 5 ▼ Reserved seat ▼Non-reserved seat SAMPLE SAMPLE ▶ 指 定 券 指 定 券 KAWASEMI YAMASEMI RESERVED SEAT TICKET RESERVED SEAT TICKET 博 多 由 布 院 博 多 由 布 院 HAKATA YUFUIN HAKATA YUFUIN JAN. 1(9:24発) (11:35着) JAN. 1(9:24発) (11:35着) YUFUIN NO MORI 1 CAR.1 SEAT.2-A YUFUIN NO MORI 1 CAR.1 SEAT.2-A Kumamoto ー Hitoyoshi ー Yoshimatsu CAR.1 SEAT.2-A or ▶5 To use a reserved Non-reserved seats Isaburo / Shinpei seat,one must make can be used freely if a reservation in standing they are empty. -

Survey on Different Classification
International Conference On Recent Trends In Engineering Science And Management ISBN: 978-81-931039-2-0 Jawaharlal Nehru University, Convention Center, New Delhi (India), 15 March 2015 www.conferenceworld.in SURVEY ON DIFFERENT CLASSIFICATION TECHNIQUES FOR DETECTION OF FAKE PROFILES IN SOCIAL NETWORKS Ameena A1, Reeba R2 1,2, Department of Computer Science And Engineering, Sree Buddha College Of Engineering, Pattoor (India) ABSTRACT In the present generation, the social life of everyone has become associated with the online social networking sites. But with their rapid growth, many problems like fake profiles, online impersonation have also grown. There are no feasible solution exist to control these problems. In this paper, survey on different classification techniques for detection of fake profiles in social networks is proposed. This paper presents the classification techniques like Support Vector Machine, Naive Bayes and Decision trees to classify the profiles into fake or genuine classes. This classification techniques can be used as a framework for automatic detection of fake profiles, it can be applied easily by online social networks which has millions of profile whose profiles cannot be examined manually. Keywords : SVM, SNS, Decision Tree, Naive Bayes Classification, Support Vector Machine I. INTRODUCTION Social Networking Sites (SNS) are web-based services that facilitates individuals to construct a profile, which is either public or semi-public. SNS contains list of users with whom we can share a connection, view their activities in network and also converse. SNS users communicate by messages, blogs, chatting, video and music files. SNS also have many disadvantages such as information is public, security problem, cyber bullying and misuse and abuse of SNS platform. -
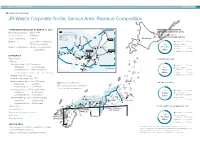
Fact Sheets 2011 (Managerial Data & Financial Data)
WEST JAPAN RAILWAY COMPANY Fact Sheets 2011 1 Corporate Overview JR-Hokkaido Sapporo JR-West’s Corporate Profi le, Service Area, Revenue Composition COrpOrate prOfIle (as Of MarCh 31, 2011) reVenUe COMpOsItIOn Date of establishment: April 1, 1987 Boundary Stations between Omishiotsu (fy enDeD MarCh 31, 2011) JR-West and Other JR Companies OPEraTiNg rEvENuEs Common stock: ¥100 billion Shinkansen Line (Bullet Train) (rEvENuEs FrOm THird ParTiEs) Shares outstanding: 2 million Intercity Lines JR-Hokkaido Regional Lines Maibara Employees: 26,705 (non-consolidated) Sapporo • Transportation .........¥806.4 billion • Sales of Goods and 45,703 (consolidated) Tanigawa Total Food Services .........¥201.3 billion Number of subsidiaries: 145 ( incl. 65 consolidated Yamashina Kusatsu ¥1,213.5 Kyoto • Real Estate ................¥75.7 billion subsidiaries) billion Shin-Osaka Kameyama • Other Businesses ....¥129.9 billion Aioi Himeji Kakogawa Tsuge BUsInesses Shin-Kobe Kyobashi JR-East Amagasaki Nara Kobe Transportation Nishi-Akashi Osaka Tennoji OPEraTiNg iNCOmE Oji • Railway Takada Kansai Airport Total route length: 5,012.7 kilometers • Transportation ...........¥61.1 billion Shinkansen 644.0 kilometers Kyoto-Osaka-Kobe Area Total “Urban Network” • Sales of Goods and Conventional lines 4,368.7 kilometers Food Services .............¥3.5 billion Wakayama ¥95.9 Tokyo JR-Central • Real Estate ................¥22.2 billion * The total route length is the sum of the Shinkansen and conventional lines. billion JR-West Kyoto Nagoya Shinagawa• Other Businesses -

Open Sound Data Catalog Created on 2021/04/17 19:22:02
Open Sound Data Catalog https://desktopstation.net/sounds/ Created on 2021/04/17 19:22:02 This catalog introduces a list of locomotives and sound data available on Open Sound Data, a project for distributing Japanese-style sound data for digital model railroads (DCC). Use of the data is free of charge, but compliance with the terms and conditions is required. Please refer to the Open Sound Data website for more information. Old Kokuden Type nose suspension drive Provided by MB3110A@zhengdao_X The sound of a suspended motor is something that we cannot hear around us anymore. The ESU sound decoder fulfilled my wish that the nostalgic sound of the suspension motor would remain in service forever. The sound source is based on the running sound of Tobu 3050 series, and various operation sounds such as old auxiliary equipment are added to make it highly versatile. The sound source is based on the running sound of Tobu 3050 series. This data can be used with the LokSound V4 series and LokSound 5 series, but the LokSound V4 rescue version has some limitations in sound quality and functions. URL https://desktopstation.net/sounds/osd2.html Kiha 40 series diesel car Provided by MB3110A@zhengdao_X, Tochigi General Rolling Stock Office This is the sound of the DMF15HSA internal combustion engine (original engine) used in the Kiha40 series. I wanted to preserve the sound of the original engine in a model, so I combined the sound recorded by MB3110A with my own sound. I would be happy if you could run it with the diesel sound. -

Part 2: Speeding-Up Conventional Lines and Shinkansen Asahi Mochizuki
Breakthrough in Japanese Railways 9 JRTR Speed-up Story 2 Part 2: Speeding-up Conventional Lines and Shinkansen Asahi Mochizuki Reducing Journey Times on is limited by factors such as curves, grades, and turnouts, so Conventional Lines scheduled speed can only be increased by focusing effort on increasing speed at these locations. Distribution of factors limiting speed Many of the intercity railways in Japan are lines in The maximum speed of any line is determined by emergency mountainous areas. So, objectives for increasing speeds braking distance. However, train speeds are also restricted by cannot be achieved by simply raising the maximum speed. various other factors, such as curves, grades, and turnouts. Acceleration and deceleration performance also impact Speed-up on curves journey time. The impact of each element depends on the The basic measures for increasing speeds on curves are terrain of the line. The following graphs show the distributions lowering the centre of gravity of rolling stock and canting the of these elements for the Joban Line, crossing relatively flat track. However, these measures have already been applied land, and for the eastern section of the Chuo Line, running fully; cant cannot be increased on lines serving slow freight through mountains. trains with a high centre of gravity. Conversely, increasing The graph for the Joban Line crossing the flat Kanto passenger train speed through curves to just below the limit Plain shows that it runs at the maximum speed of 120 km/h where the trains could overturn causes reduced ride comfort (M part) for about half the journey time.