Article Swarm Optimization Algo- Rithm in River Stage Forecasting, J
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Appendix 8: Damages Caused by Natural Disasters
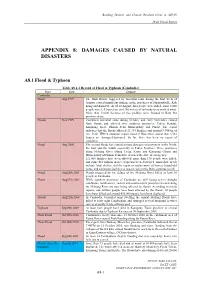
Building Disaster and Climate Resilient Cities in ASEAN Draft Finnal Report APPENDIX 8: DAMAGES CAUSED BY NATURAL DISASTERS A8.1 Flood & Typhoon Table A8.1.1 Record of Flood & Typhoon (Cambodia) Place Date Damage Cambodia Flood Aug 1999 The flash floods, triggered by torrential rains during the first week of August, caused significant damage in the provinces of Sihanoukville, Koh Kong and Kam Pot. As of 10 August, four people were killed, some 8,000 people were left homeless, and 200 meters of railroads were washed away. More than 12,000 hectares of rice paddies were flooded in Kam Pot province alone. Floods Nov 1999 Continued torrential rains during October and early November caused flash floods and affected five southern provinces: Takeo, Kandal, Kampong Speu, Phnom Penh Municipality and Pursat. The report indicates that the floods affected 21,334 families and around 9,900 ha of rice field. IFRC's situation report dated 9 November stated that 3,561 houses are damaged/destroyed. So far, there has been no report of casualties. Flood Aug 2000 The second floods has caused serious damages on provinces in the North, the East and the South, especially in Takeo Province. Three provinces along Mekong River (Stung Treng, Kratie and Kompong Cham) and Municipality of Phnom Penh have declared the state of emergency. 121,000 families have been affected, more than 170 people were killed, and some $10 million in rice crops has been destroyed. Immediate needs include food, shelter, and the repair or replacement of homes, household items, and sanitation facilities as water levels in the Delta continue to fall. -

Improving WRF Typhoon Precipitation and Intensity Simulation Using a Surrogate-Based Automatic Parameter Optimization Method
atmosphere Article Improving WRF Typhoon Precipitation and Intensity Simulation Using a Surrogate-Based Automatic Parameter Optimization Method Zhenhua Di 1,2,* , Qingyun Duan 3 , Chenwei Shen 1 and Zhenghui Xie 2 1 State Key Laboratory of Earth Surface Processes and Resource Ecology, Faculty of Geographical Science, Beijing Normal University, Beijing 100875, China; [email protected] 2 State Key Laboratory of Numerical Modeling for Atmospheric Sciences and Geophysical Fluid Dynamics, Institute of Atmospheric Physics, Chinese Academy of Sciences, Beijing 100029, China; [email protected] 3 State Key Laboratory of Hydrology-Water Resources and Hydraulic Engineering, College of Hydrology and Water Resources, Hohai University, Nanjing 210098, China; [email protected] * Correspondence: [email protected]; Tel.: +86-10-5880-0217 Received: 7 December 2019; Accepted: 8 January 2020; Published: 10 January 2020 Abstract: Typhoon precipitation and intensity forecasting plays an important role in disaster prevention and mitigation in the typhoon landfall area. However, the issue of improving forecast accuracy is very challenging. In this study, the Weather Research and Forecasting (WRF) model typhoon simulations on precipitation and central 10-m maximum wind speed (10-m wind) were improved using a systematic parameter optimization framework consisting of parameter screening and adaptive surrogate modeling-based optimization (ASMO) for screening sensitive parameters. Six of the 25 adjustable parameters from seven physics components of the WRF model were screened by the Multivariate Adaptive Regression Spline (MARS) parameter sensitivity analysis tool. Then the six parameters were optimized using the ASMO method, and after 178 runs, the 6-hourly precipitation, and 10-m wind simulations were finally improved by 6.83% and 13.64% respectively. -

Testing a Coupled Global-Limited-Area Data Assimilation
TESTING A COUPLED GLOBAL-LIMITED-AREA DATA ASSIMILATION SYSTEM USING OBSERVATIONS FROM THE 2004 PACIFIC TYPHOON SEASON A Thesis by CHRISTINA R. HOLT Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE August 2011 Major Subject: Atmospheric Sciences Testing a Coupled Global-limited-area Data Assimilation System Using Observations from the 2004 Pacific Typhoon Season Copyright 2011 Christina R. Holt TESTING A COUPLED GLOBAL-LIMITED-AREA DATA ASSIMILATION SYSTEM USING OBSERVATIONS FROM THE 2004 PACIFIC TYPHOON SEASON A Thesis by CHRISTINA R. HOLT Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Approved by: Chair of Committee, Istvan Szunyogh Committee Members, Robert Korty Russ Schumacher Mikyoung Jun Head of Department, Kenneth Bowman August 2011 Major Subject: Atmospheric Sciences iii ABSTRACT Testing a Coupled Global-limited-area Data Assimilation System Using Observations from the 2004 Pacific Typhoon Season. (August 2011) Christina R. Holt, B.S., University of South Alabama Chair of Advisory Committee: Dr. Istvan Szunyogh Tropical cyclone (TC) track and intensity forecasts have improved in recent years due to increased model resolution, improved data assimilation, and the rapid increase in the number of routinely assimilated observations over oceans. The data assimilation approach that has received the most attention in recent years is Ensemble Kalman Filtering (EnKF). The most attractive feature of the EnKF is that it uses a fully flow- dependent estimate of the error statistics, which can have important benefits for the analysis of rapidly developing TCs. -

Typhoon Mindulle, Taiwan, July 2004
Short-term changes in seafl oor character due to fl ood-derived hyperpycnal discharge: Typhoon Mindulle, Taiwan, July 2004 J.D. Milliman School of Marine Science, College of William and Mary, Gloucester Point, Virginia 23062, USA S.W. Lin Institute of Oceanography, National Taiwan University, Taipei 106, Taiwan S.J. Kao Research Center for Environmental Change, Academia Sinica, Taipei 115, Taiwan J.P. Liu Department of Marine, Earth and Atmospheric Sciences, North Carolina State University, Raleigh, North Carolina 27695, USA C.S. Liu J.K. Chiu Institute of Oceanography, National Taiwan University, Taipei 106, Taiwan Y.C. Lin ABSTRACT amount of sediment, however, is signifi cant; During Typhoon Mindulle in early July 2004, the Choshui River (central-western Taiwan) since 1965 the Choshui River has discharged discharged ~72 Mt of sediment to the eastern Taiwan Strait; peak concentrations were ≥200 ~1.5–2 Gt of sediment to the Taiwan Strait. g/L, ~35%–40% of which was sand. Box-core samples and CHIRP (compressed high-intensity radar pulse) sonar records taken just before and after the typhoon indicate that the hyper- STUDY APPROACH pycnal sediment was fi rst deposited adjacent to the mouth of the Choshui, subsequently To document the impact of a hyperpycnal re suspended and transported northward (via the Taiwan Warm Current), and redeposited as event, we initiated a preliminary study of the a patchy coastal band of mud-dominated sediment that reached thicknesses of 1–2 m within seafl oor off the Choshui River from 22–26 megaripples. Within a month most of the mud was gone, probably continuing its northward June 2004. -

East & Southeast Asia: Typhoon Aere and Typhoon
EAST & SOUTHEAST ASIA: TYPHOON AERE AND 26 August 2004 TYPHOON CHABA The Federation’s mission is to improve the lives of vulnerable people by mobilizing the power of humanity. It is the world’s largest humanitarian organization and its millions of volunteers are active in over 181 countries. In Brief This Information Bulletin (no. 01/2004) is being issued for information only. The Federation is not seeking funding or other assistance from donors for this operation at this time. For further information specifically related to this operation please contact: in Geneva: Asia and Pacific Department; phone +41 22 730 4222; fax+41 22 733 0395 All International Federation assistance seeks to adhere to the Code of Conduct and is committed to the Humanitarian Charter and Minimum Standards in Disaster Response in delivering assistance to the most vulnerable. For support to or for further information concerning Federation programmes or operations in this or other countries, or for a full description of the national society profile, please access the Federation’s website at http://www.ifrc.org The Situation Over the past 48 hours over a million people have had to be evacuated as two powerful typhoons, Typhoon Aere and Typhoon Chaba have been adversely affecting parts of East Asia and the Philippines. East Asia Some 516,000 people were evacuated earlier this week in response to the approach of Typhoon Aere which struck Taiwan with winds measuring as high as 165 kilometres per hour on Tuesday 24 August, triggering flooding and landslides throughout central and northern Taiwan. Thousands of homes were damaged in northern Taiwan, and thousands of people in the mountainous area of Hsinchu were stranded due to blocked roads. -

(2004) and Yagi (2006) Using Four Methods
1394 WEATHER AND FORECASTING VOLUME 27 Determining the Extratropical Transition Onset and Completion Times of Typhoons Mindulle (2004) and Yagi (2006) Using Four Methods QIAN WANG Ocean University of China, Qingdao, and Shanghai Typhoon Institute and Laboratory of Typhoon Forecast Technique, China Meteorological Administration, Shanghai, China QINGQING LI Shanghai Typhoon Institute and Laboratory of Typhoon Forecast Technique, China Meteorological Administration, Shanghai, China GANG FU Laboratory of Physical Oceanography, Key Laboratory of Ocean–Atmosphere Interaction and Climate in Universities of Shandong, and Department of Marine Meteorology, Ocean University of China, Qingdao, China (Manuscript received 5 December 2011, in final form 21 July 2012) ABSTRACT Four methods for determining the extratropical transition (ET) onset and completion times of Typhoons Mindulle (2004) and Yagi (2006) were compared using four numerically analyzed datasets. The open-wave and scalar frontogenesis parameter methods failed to smoothly and consistently determine the ET completion from the four data sources, because some dependent factors associated with these two methods significantly impacted the results. Although the cyclone phase space technique succeeded in determining the ET onset and completion times, the ET onset and completion times of Yagi identified by this method exhibited a large distinction across the datasets, agreeing with prior studies. The isentropic potential vorticity method was also able to identify the ET onset times of both Mindulle and Yagi using all the datasets, whereas the ET onset time of Yagi determined by such a method differed markedly from that by the cyclone phase space technique, which may create forecast uncertainty. 1. Introduction period due to the complex interaction between the cy- clone and the midlatitude systems. -

Mesoscale Processes for Super Heavy Rainfall of Typhoon Morakot (2009) Over Southern Taiwan
Atmos. Chem. Phys., 11, 345–361, 2011 www.atmos-chem-phys.net/11/345/2011/ Atmospheric doi:10.5194/acp-11-345-2011 Chemistry © Author(s) 2011. CC Attribution 3.0 License. and Physics Mesoscale processes for super heavy rainfall of Typhoon Morakot (2009) over Southern Taiwan C.-Y. Lin1, H.-m. Hsu2, Y.-F. Sheng1, C.-H. Kuo3, and Y.-A. Liou4 1Research Center for Environmental Changes, Academia Sinica, Taipei, Taiwan 2National Center for Atmospheric Research, Boulder, Colorado, USA 3Department of Geology, Chinese Culture University, Taipei, Taiwan 4Center for Space and Remote Sensing Research, National Central University, Jhongli, Taiwan Received: 20 April 2010 – Published in Atmos. Chem. Phys. Discuss.: 27 May 2010 Revised: 10 December 2010 – Accepted: 29 December 2010 – Published: 14 January 2011 Abstract. Within 100 h, a record-breaking rainfall, typhoon Morakot (2009) traversed the island of Taiwan over 2855 mm, was brought to Taiwan by typhoon Morakot in Au- 5 days (6–10 August 2009). It was the heaviest total rain- gust 2009 resulting in devastating landslides and casualties. fall for a single typhoon impinging upon the island ever Analyses and simulations show that under favorable large- recorded. This typhoon has set many new records in Tai- scale situations, this unprecedented precipitation was caused wan. Nine of the ten highest daily rainfall accumulations first by the convergence of the southerly component of the in the historical record were made by typhoon Morakot, ac- pre-existing strong southwesterly monsoonal flow and the cording to the Central Weather Bureau (CWB). Among them, northerly component of the typhoon circulation. -

TC Newsletter N. 17
No. 17 ESCAP/WMO September 2005 Typhoon Committee Newsletter Thirty-Seventh Session of the Typhoon Committee Prevention Award was presented to China’s National Meteorological Center during the opening of the session. The session also elected China’s Xu Xiaofeng and USA’s Jeffrey LaDouce, as chairman and vice-chairman of the Committee, respectively. Reviewing the activities under its meteorological, hydrological, and disaster prevention and preparedness components, as well as in training and research, the Committee established the work- ing groups on meteorology (WGM) and disaster prevention and preparedness (WGDPP), and also re-established the working group on hydrology (WGH). Opening of the thirty-seventh session of the Typhoon Committee held at the Shanghai Meteorological Bureau conference hall. The WGM was requested to address the issues on the level of Asia-Pacific meteorologists from UNEP, UN-ISDR, CAS and ADRC attended the 5-day advancement and capacity of meeting in the thirty-seventh session. the members’ National Meteoro- annual session of the Typhoon Com- logical and Hydrological Services mittee held in Shanghai, China on Opening remarks were delivered (NMHSs); sharing of experiences 16-20 November 2004, discussed by Hu Yan Zhao, Mayor of Shang- among members; and linkages year-round efforts to strengthen hai; Qin Dahe, administrator of with requirements and activities of weather forecasting capabilities to China Meteorological Administra- other TC working groups, and mitigate the damaging effects of tion; Le-Huu Ti, representative of training and research. typhoons in the western North the Economic and Social Commis- Pacific region which includes China, sion for Asia and the Pacific The Committee called on inter- Japan, Korea, the countries of (ESCAP) and Eisa H. -

The MJO Is Currently Weak and Incoherent. the Recent Uptick in Tropical Storm Activity This Past Week Across This Region Has Aliased Into the MJO Band
The MJO is currently weak and incoherent. The recent uptick in tropical storm activity this past week across this region has aliased into the MJO band. This makes it difficult to separate out the convective contributions from tropical cyclones and from the MJO itself. Dynamical model guidance generally suggests a westward shift in the tropical convection from the western North Pacific towards the Maritime Continent during the next two weeks, with some weakening possible. The global tropics have been very active this past week with tropical cyclone activity. In the western North Pacific, severe tropical storm Chanthu (August 11-17) developed out of a depression located about 430 miles west-northwest of Guam, eventually making landfall in Hokkaido, Japan at peak intensity with maximum sustained winds of 65 mph. Tropical storm Dianmu (August 15-19)started its life cycle as a tropical depression about 120 miles east-southeast of Hong Kong. Dianmu then tracked westward, bringing heavy rains and peak winds of 45 mph to the province of Hainan. Ongoing severe tropical storm Lionrock began as a depression about 430 miles northwest of Wake Island on August 16th. The Joint Typhoon Warning Center (JTWC) in Honolulu forecasts Lionrock to slowly work its way northward towards southern Japan, but then recurve northeastward well off the coast of Honshu, reaching a peak intensity near 85 mph (gusts to 100 mph) on August 26-27. Typhoon Mindulle began as a tropical depression northwest of Guam on August 17th, and moved generally northward towards Japan. Tokyo received heavy rain, flooding, and strong winds from this system on August 21-22. -

In Taiwan Debris Flow Hazards and Emergency Response
Monitoring, Simulation, Prevention and Remediation of Dense and Debris Flows 311 Debris flow hazards and emergency response in Taiwan C.-Y. Chen1, W.-C. Lee1 & F.-C. Yu2 1National Science and Technology Center for Disaster Reduction (NCDR), Taipei, Taiwan, Republic of China 2National Chung-Hsing University, Taichung, Taiwan, Republic of China Abstract According to the field investigation by Soil and Water Conservation Bureau (SWCB) after the M7.6 Chi-Chi earthquake, there are 1,420 streams prone to initiating debris flow. The initiated slopeland related hazards are correlated to the geological conditions, topographic elevation, engineering design and human induced effects in addition to the strong seismic effects. The study summarized the debris flow and landslide hazards and their casual factors using field investigation of the post seismic hazards in Taiwan. The emergency responses of the National Science & Technology Center for Disaster Reduction (NCDR) and governmental departments for typhoon induced flood and debris flow are introduced herein. Through the use of the active response mechanism, the casualties from typhoon-induced hazards are reduced and further enhancements for hazard mitigation by the hazard characteristics are suggested. Keywords: debris flow, landslide, emergency response, Chi-Chi earthquake, Taiwan. 1 Introduction According to statistics from the Central Weather Bureau, the total economic loss of typhoon induced natural hazards is estimated to be around 174 billion Taiwan dollars as an average each year from 1980 to 1998. Overall economic loss increased following the M7.6 Chi-Chi earthquake in 1999 until recent years. Typhoon Toraji (in 2001) caused a loss of 7,700 billion, Typhoon Nari cost (in 2001) 9,000 billion, and Typhoon Mindulle and the following storm (in 2004) resulted in 8,900 billion of economic loss. -
Analysis of the Dynamic Responses of the Northern Guam Lens Aquifer to Sea Level Change and Recharge
ANALYSIS OF THE DYNAMIC RESPONSES OF THE NORTHERN GUAM LENS AQUIFER TO SEA LEVEL CHANGE AND RECHARGE H. Victor Wuerch Benny C. Cruz Arne E. Olsen Technical Report No. 118 November, 2007 Analysis of the Dynamic Response of the Northern Guam Lens Aquifer to Sea Level Change and Recharge by H. Victor Wuerch Benny C. Cruz Guam Environmental Protection Agency & Arne E. Olsen Water & Environmental Research Institute of the Western Pacific University of Guam Technical Report No. 118 November, 2007 The work reported herein was funded, in part, by the Government of Guam via the Guam Hydrologic Survey administered through the Water and Environmental Research Institute of the Western Pacific (WERI) at the University of Guam and the Guam Environmental Protection Agency (GEPA) Consolidated Grant from the U.S. Environmental Protection Agency (FY 2004, Consolidated Grant and FY 2005 Consolidated Grant). Funding for data collection was provided to the Department of the Interior, U.S. Geological Survey (USGS) through a Joint Funding Agreement between the GEPA and the USGS, under Contract Number C04-0603-270. The content of this report does not necessarily reflect the views and policies of the Department of Interior, nor does the mention of trade names or commercial products constitute their endorsement by the Government of Guam or the United States Government. ABSTRACT Northern Guam Lens (Lens) is the primary fresh water resource on Guam. A plethora of research has been conducted upon the Lens; generally, this research has focused on aquifer processes that occur at a monthly or annual time scale. The focus of this paper is analysis of data that was collected, in a collaborative effort between the Guam Environmental Protection Agency, the United States Geological Survey, and the Water and Environmental Research Institute of the Western Pacific at the University of Guam, between May 25, 2004 and February 20, 2005, at a finer time-scale. -

View of Silicate Weathering Cycle……………………………………
PHYSICAL AND CHEMICAL WEATHERING PROCESSES AND ASSOCIATED CO2 CONSUMPTION FROM SMALL MOUNTAINOUS RIVERS ON HIGH-STANDING ISLANDS DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Steven Todd Goldsmith, M.S. Geological Sciences Graduate Program The Ohio State University 2009 Dissertation Committee: Professor Anne E. Carey, Advisor Professor W. Berry Lyons Professor Michael Barton Professor Wendy Panero Copyright by Steven Todd Goldsmith 2009 ii ABSTRACT Recent studies of chemical weathering of on high standing islands (HSIs) have shown these terrains have some of the highest observed rates of chemical weathering and associated CO2 consumption yet reported. However, much remains unknown about controlling process. To determine the role these islands play on climate the following were evaluated: 1. dissolved, particulate and organic carbon fluxes delivered to the ocean from a small-mountainous river on an HSI during an intense storm event (i.e., typhoon); 2. relationship between physical and chemical weathering rates on an HSI characterized by ranges of uplift rates and lithology; 3. water and sediment geochemical fluxes and CO2 consumption rates on HSIs with andesitic-dacitic volcanism; and 4. the overall chemical weathering fluxes and CO2 consumption rates from andesitic-dacitic terrains on HSIs of the Pacific and the East and Southeast Asia region. Sampling of the Choshui River in Taiwan during Typhoon Mindulle in 2004 revealed a particulate organic carbon (POC) flux of 5.00x105 tons associated with a sediment flux of 61 million tons during a 96 hour period. The linkage of high amounts of POC with sediment concentrations capable of generating a hyperpycnal plume upon reaching the ocean provides the first known evidence for the rapid delivery and burial of POC from the terrestrial system.