Navigation Lesson 6
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Marine Charts and Navigation
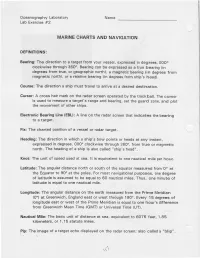
OceanographyLaboratory Name Lab Exercise#2 MARINECHARTS AND NAVIGATION DEFINITIONS: Bearing:The directionto a target from your vessel, expressedin degrees, 0OO" clockwise through 360". Bearingcan be expressedas a true bearing (in degreesfrom true, or geographicnorth), a magneticbearing (in degreesfrom magnetic north),or a relativebearing (in degreesfrom ship's head). Gourse:The directiona ship must travel to arrive at a desireddestination. Cursor:A cross hairmark on the radarscreen operated by the trackball.The cursor is used to measurea target'srange and bearing,set the guard zone,and plot the movementof other ships. ElectronicBearing Line (EBLI: A line on the radar screenthat indicates the bearing to a target. Fix: The charted positionof a vesselor radartarget. Heading:The directionin which a ship's bow pointsor headsat any instant, expressedin degrees,O0Oo clockwise through 360o,from true or magnetic north. The headingof a ship is alsocalled "ship's head". Knot: The unit of speedused at sea. lt is equivalentto one nauticalmile perhour. Latitude:The angulardistance north or south of the equatormeasured from O" at the Equatorto 9Ooat the poles.For most navigationalpurposes, one degree of latitudeis assumedto be equalto 60 nauticalmiles. Thus, one minute of latitude is equalto one nauticalmile. Longitude:The'angular distance on the earth measuredfrom the Prime Meridian (O') at Greenwich,England east or west through 180'. Every 15 degreesof longitudeeast or west of the PrimeMeridian is equalto one hour's difference from GreenwichMean Time (GMT)or Universal (UT). Time NauticalMile: The basic unit of distanceat sea, equivalentto 6076 feet, 1.85 kilometers,or 1.15 statutemiles. Pip:The imageof a targetecho displayedon the radarscreen; also calleda "blip". -

Map and Compass
UE CG 039-089 2018_UE CG 039-089 2018 2018-08-29 9:57 AM Page 56 MAP The north magnetic pole is not the same as the geographic North Pole, also known as AND COMPASS true north, which is the northern end of the axis around which the earth spins. In fact, the north magnetic pole currently lies Background Information approximately 800 mi (1300 km) south of the geographic North Pole, in northern A compass is an instrument that people use Canada. And because the north magnetic to find a direction in relation to the earth as pole migrates at 6.6 mi (10 km) per year, its a whole. The magnetic needle in the location is constantly changing. compass, which is the freely moving needle in the compass that has a red end, points The meridians of longitude on maps and north. More specifically, this needle points globes are based upon the geographic to the north magnetic pole, the northern North Pole rather than the north magnetic end of the earth’s magnetic field, which pole. This means that magnetic north, the can be imagined as lines of magnetism that direction that a compass indicates as north, leave the south magnetic pole, flow north is not the same direction as maps indicate around the earth, and then enter the north for north. Magnetic declination, the magnetic pole. difference in the angle between magnetic north and true north must, therefore, be Any magnetized object, an object with two taken into account when navigating with a oppositely charged ends, such as a magnet map and a compass. -

Angles, Azimuths and Bearings
Surveying & Measurement Angles, Azimuths and Bearings Introduction • Finding the locations of points and orientations of lines depends on measurements of angles and directions. • In surveying, directions are given by azimuths and bearings. • Angels measured in surveying are classified as . Horizontal angels . Vertical angles Introduction • Total station instruments are used to measure angels in the field. • Three basic requirements determining an angle: . Reference or starting line, . Direction of turning, and . Angular distance (value of the angel) Units of Angel Measurement In the United States and many other countries: . The sexagesimal system: degrees, minutes, and seconds with the last unit further divided decimally. (The circumference of circles is divided into 360 parts of degrees; each degree is further divided into minutes and seconds) • In Europe . Centesimal system: The circumference of circles is divided into 400 parts called gon (previously called grads) Units of Angel Measurement • Digital computers . Radians in computations: There are 2π radians in a circle (1 radian = 57.30°) • Mil - The circumference of a circle is divided into 6400 parts (used in military science) Kinds of Horizontal Angles • The most commonly measured horizontal angles in surveying: . Interior angles, . Angles to the right, and . Deflection angles • Because they differ considerably, the kind used must be clearly identified in field notes. Interior Angles • It is measured on the inside of a closed polygon (traverse) or open as for a highway. • Polygon: closed traverse used for boundary survey. • A check can be made because the sum of all angles in any polygon must equal • (n-2)180° where n is the number of angles. -
Silva Manual- Mirror Sighting Compasses
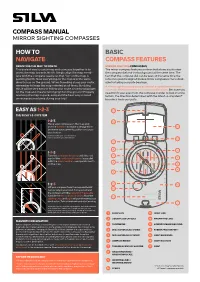
COMPASSHOW MANUAL TO MIRROR SIGHTING COMPASSES NAVIGATEHOW TO BASIC NAVIGATE COMPASS FEATURES HOWORIENTING TO THE MAP TO NORTH MIRROR SIGHTING COMPASSES EASYThe easiest way to use a map and compass AS together is to The mirror compass features a mirror that allows you to view orient the map towards North. Simply align the map merid- the compass dial and the background at the same time. The ians with the compass needle so that “up” on the map is fact that the compass dial can be seen at the same time the pointing North. Now everything on the map is in the same reference point is aligned makes mirror compasses more desir- NAVIGATEdirection as on the ground. When travelling along your route, able for taking accurate bearings. remember to keep the map oriented at all times. By doing A mirror-sighting compass is at its best in open terrain where 1-2-3this it will be very easy to follow your route since turning right you must determine direction over long distances. Because you on the map also means turning right on the ground! Properly needn’t lift your eyes from the compass in order to look into the orienting1-2-3 the map is quick, easy1-2 and-3 the best way to avoid1-2- 3 terrain, the direction determined with the Silva 1-2-3 System® HOW TOunnecessaryPlace your compass mistakes on the map duringTurn your the compass trip! housing until the Lift your compass frombecomes the map more accurate. and use the baseline to make a red part of the north/south arrow and hold it horizontally in your EASYstraight line between AS your current is parallel with the map meridians, hand. -

Environmental Geocaching: Learning Through Nature and Technology
WSFNR-20-67A September 2020 ENVIRONMENTAL GEOCACHING: LEARNING THROUGH NATURE AND TECHNOLOGY Brady Self, Associate Extension Professor, Department of Forestry, Mississippi State University Jason Gordon, Assistant Professor, Warnell School of Forestry & Natural Resources, University of Georgia Parents, natural resource professionals and enthusiasts, and youth coordinators often find themselves at a loss when trying to encour- age younger generations to take up outdoor pastimes. The allure of electronic technology, team sports, combined with time availability of parents sometimes limits overall involve- ment of today’s youth in more traditional outdoor activities. In this fast-paced world, learning about nature and what occurs in the forest seems to be losing ground when competing for adolescents’ interest and time. The good news is that there are still many op- portunities to involve youth in the outdoors. The game of geocaching provides one of these opportunities. Geocaching offers learning and fun while spending time in nature. Geocaching is an outdoor treasure hunting game that operates much like the scavenger hunting that many parents and grandparents remember from their youth. The game adds the use of GPS technology (either a dedi- cated receiver unit, or more commonly, a GPS-enabled smartphone) to guide players to locations where individual geocaches are hidden. Clues are then used to search for the geocache. Geocaches can be selected or created with a theme focused on learning about forests, wildlife, and other natural resources. These experiences are then shared online in the geocaching community. The overall objective of the activity is to guide participants to places of significance where they have the opportu- nity to learn something about that particular location or geocache topic. -

Caliper Abuse for Beginners a Guide to Quick and Accurate Layout Using Digital Calipers
Caliper Abuse for Beginners A Guide to Quick and Accurate Layout Using Digital Calipers charles z guan productions 21 Mar 2010 In your 2.007 kit, you have been provided with a set of 6” (150mm) digital calipers. You should use these not only for measuring and ascertaining dimensions of parts, but for accurate positioning of holes and other features when manually fabricating a part. Marking out feature positions and part dimensions using a standard ruler is often the first choice for students unfamiliar with engineering tools. This method yields marginal results and usually results in parts which need filing, sanding, or other “one-off” fitting. This document is intended to exposit a fairly common but usually unspoken shortcut that balances time spent laying out a part for fabrication with reasonably accurate results. We will be using a 3 x 1” aluminum box extrusion as the example workpiece. Let's say that we wanted to drill a hole that is 0.975” above the bottom edge of this piece and 1.150” from the right edge. Neither dimension is a common fraction, nor a demarcation found on most rulers. How would we drill such a hole on the drill press? Here, I have set the caliper to 0.975”, after making sure it is properly zeroed. Use the knurled knob to physically lock the caliper to a reading. These calipers have a resolution of 0.0005”. However, this last digit is extremely uncertain. Treat your dimensions as if Calipers are magnetic and can they only have 3 digits attract dirt and grit. -

Dead Reckoning and Magnetic Declination: Unveiling the Mystery of Portolan Charts
Joaquim Alves Gaspar * Dead reckoning and magnetic declination: unveiling the mystery of portolan charts Keywords : medieval charts; cartometric analysis; history of cartography; map projections of old charts; portolan charts Summary For more than two centuries much has been written about the origin and method of con- struction of the Mediterranean portolan charts; still these matters continue to be the object of some controversy as no one explanation was able to gather unanimous agreement among researchers. If some theory seems to prevail, that is certainly the one asserting the medieval origin of the portolan chart, which would have followed the introduction of the marine compass in the Mediterranean, when the pilots start to plot the magnetic directions and es- timated distances between ports observed at sea. In the research here presented a numerical model which simulates the construction of the old portolan charts is tested. This model was developed in the light of the navigational methods available at the time, taking into account the spatial distribution of the magnetic declination in the Mediterranean, as estimated by a geomagnetic model based on paleomagnetic data. The results are then compared with two extant charts using cartometric analysis techniques. It is concluded that this type of meth- odology might contribute to a better understanding of the geometry and methods of con- struction of the portolan charts. Also, the good agreement between the geometry of the ana- lysed charts and the model’s results clearly supports the a-priori assumptions on their meth- od of construction. Introduction The medieval portolan chart has been considered as a unique achievement in the history of maps and marine navigation, and its appearance one of the most representative turn- ing points in the development of nautical cartography. -

FIELD EXTENSIONS and the CLASSICAL COMPASS and STRAIGHT-EDGE CONSTRUCTIONS 1. Introduction to the Classical Geometric Problems 1
FIELD EXTENSIONS AND THE CLASSICAL COMPASS AND STRAIGHT-EDGE CONSTRUCTIONS WINSTON GAO Abstract. This paper will introduce the reader to field extensions at a rudi- mentary level and then pursue the subject further by looking to its applications in a discussion of some constructibility issues in the classical straight-edge and compass problems. Field extensions, especially their degrees are explored at an introductory level. Properties of minimal polynomials are discussed to this end. The paper ends with geometric problems and the construction of polygons which have their proofs in the roots of field theory. Contents 1. introduction to the classical geometric problems 1 2. fields, field extensions, and preliminaries 2 3. geometric problems 5 4. constructing regular polygons 8 Acknowledgments 9 References 9 1. Introduction to the Classical Geometric Problems One very important and interesting set of problems within classical Euclidean ge- ometry is the set of compass and straight-edge questions. Basically, these questions deal with what is and is not constructible with only an idealized ruler and compass. The ruler has no markings (hence technically a straight-edge) has infinite length, and zero width. The compass can be extended to infinite distance and is assumed to collapse when lifted from the paper (a restriction that we shall see is irrelevant). Given these, we then study the set of constructible elements. However, while it is interesting to note what kinds objects we can create, it is far less straight forward to show that certain objects are impossible to create with these tools. Three famous problems that we will investigate will be the squaring the circle, doubling the cube, and trisecting an angle. -

Autonomous Geocaching: Navigation and Goal Finding in Outdoor Domains
Autonomous Geocaching: Navigation and Goal Finding in Outdoor Domains James Neufeld Jason Roberts Stephen Walsh University of Alberta University of Alberta University of Alberta 114 St - 89 Ave 114 St - 89 Ave 114 St - 89 Ave Edmonton, Alberta Edmonton, Alberta Edmonton, Alberta [email protected] [email protected] [email protected] Michael Sokolsky Adam Milstein Michael Bowling University of Alberta University of Waterloo University of Alberta 114 St - 89 Ave 200 University Avenue West 114 St - 89 Ave Edmonton, Alberta Waterloo, Ontario Edmonton, Alberta [email protected] [email protected] [email protected] ABSTRACT ticipants use a handheld GPS to aid in ¯nding an object This paper describes an autonomous robot system designed hidden in an unknown environment given only the object's to solve the challenging task of geocaching. Geocaching GPS coordinates. Typically the objects are placed in unde- involves locating a goal object in an outdoor environment veloped areas with no obvious roads or paths. Natural ob- given only its rough GPS position. No additional informa- stacles along with the lack of any map of the terrain make tion about the environment such as road maps, waypoints, it a challenging navigation problem even for humans. In ad- or obstacle descriptions is provided, nor is there often a sim- dition, due to the error in GPS position estimates, a search ple straight line path to the object. This is in contrast to is usually required to ¯nally locate the object even after the much of the research in robot navigation which often focuses GPS coordinate has been reached. -
Military Map Reading V2.0
MILITARY MAP READING This booklet is to help qualified Defence Map Reading instructors in unit map reading training and testing. The primary source is the Manual of Map Reading and Land Navigation, Army Code 71874.Issue 1.0: Apr 2009. The booklet can be used by all ranks of HM Forces (RN, RM, Army and RAF) for study and revision. It is suggested that a map of the local area be obtained for practical work and for the study of Conventional signs, which are intentionally NOT covered in this booklet. Comments and queries should be addressed to: Senior Instructor, Geospatial Information Management Wing Royal School of Military Survey, Defence Intelligence Security Centre, Denison Barracks (SU 498 729) Hermitage, THATCHAM, Berkshire, RG18 9TP © Crown copyright. All rights reserved ICG 100015347 2007 Version 2.0 Dated December 2010. 1 MILITARY MAP READING INDEX CHAPTER 1: MAP READING FUNDAMENTALS Maps and the grid system 3 Grid references 3 MGRS 5 Romers 6 GPS 7 Scale 8 Estimating and measuring distances 9 Contours 11 The shape of the ground 12 Bearings 15 Compass distances from ferrous metal 17 CHAPTER 2: NAVIGATION EQUIPMENT The compass LW 18 The prismatic compass 20 The RA protractor 22 CHAPTER 3: TECHNIQUES AND SKILLS Relating map and ground 24 Using a lightweight compass to set a map 26 Finding a location by LW Intersection 27 Plotting back bearings-LW/RA protractor 28 Finding your location by LW resection 29 Finding direction by sun and stars 30 CHAPTER 4: ROUTE SELECTION Factors for route selection 34 Other planning factors 35 Route cards -
6. Determination of Height and Distance: Theodolite
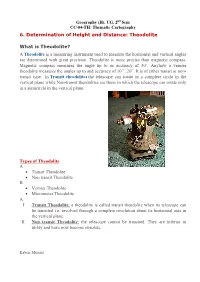
Geography (H), UG, 2nd Sem CC-04-TH: Thematic Cartography 6. Determination of Height and Distance: Theodolite What is Theodolite? A Theodolite is a measuring instrument used to measure the horizontal and vertical angles are determined with great precision. Theodolite is more precise than magnetic compass. Magnetic compass measures the angle up to as accuracy of 30’. Anyhow a vernier theodolite measures the angles up to and accuracy of 10’’, 20”. It is of either transit or non- transit type. In Transit theodolites the telescope can rotate in a complete circle in the vertical plane while Non-transit theodolites are those in which the telescope can rotate only in a semicircle in the vertical plane. Types of Theodolite A Transit Theodolite Non transit Theodolite B Vernier Theodolite Micrometer Theodolite A I. Transit Theodolite: a theodolite is called transit theodolite when its telescope can be transited i.e. revolved through a complete revolution about its horizontal axis in the vertical plane. II. Non transit Theodolite: the telescope cannot be transited. They are inferior in utility and have now become obsolete. Kaberi Murmu B I. Vernier Theodolite: For reading the graduated circle if verniers are used, the theodolite is called a vernier theodolit. II. Whereas, if a micrometer is provided to read the graduated circle the same is called as a Micrometer Theodolite. Vernier type theodolites are commonly used. Uses of Theodolite Theodolite uses for many purposes, but mainly it is used for measuring angles, scaling points of constructional works. For example, to determine highway points, huge buildings’ escalating edges theodolites are used. -

Appendix A. the Normal Geomagnetic Field in Hutchinson, Kansas (
Appendix A. The Normal Geomagnetic Field in Hutchinson, Kansas (http://www.ngdc.noaa.gov/cgi-bin/seg/gmag/fldsnth1.pl) Model: IGRF2000 Latitude: 38 deg, 3 min, 54 sec Longitude: -97 deg, 54 min, 50 sec Elevation: 0.50 km Date of Interest: 11/12/2003 ---------------------------------------------------------------------------------- D I H X Y Z F (deg) (deg) (nt) (nt) (nt) (nt) (nt) 5d 41m 66d 33m 21284 21179 2108 49067 53484 dD dI dH dX dY dZ dF (min/yr) (min/yr) (nT/yr) (nT/yr) (nT/yr) (nT/yr) (nT/yr) -6 -1 -16 -12 -39 -92 -91 ----------------------------------------------------------------------------------- Definitions D: Magnetic Declination Magnetic declination is sometimes referred to as the magnetic variation or the magnetic compass correction. It is the angle formed between true north and the projection of the magnetic field vector on the horizontal plane. By convention, declination is measured positive east and negative west (i.e. D -6 means 6 degrees west of north). For surveying practices, magnetic declination is the angle through which a magnetic compass bearing must be rotated in order to point to the true bearing as opposed to the magnetic bearing. Here the true bearing is taken as the angle measured from true North. Declination is reported in units of degrees. One degree is made up of 60 minutes. To convert from decimal degrees to degrees and minutes, multiply the decimal part by 60. For example, 6.5 degrees is equal to 6 degrees and 30 minutes (0.5 x 60 = 30). If west declinations are assumed to be negative while east declination are considered positive then True bearing = Magnetic bearing + Magnetic declination An example: The magnetic bearing of a property line has an azimuth of 72 degrees East.