Lecture1423813120.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
System Buses EE2222 Computer Interfacing and Microprocessors
System Buses EE2222 Computer Interfacing and Microprocessors Partially based on Computer Organization and Architecture by William Stallings Computer Electronics by Thomas Blum 2020 EE2222 1 Connecting • All the units must be connected • Different type of connection for different type of unit • CPU • Memory • Input/Output 2020 EE2222 2 CPU Connection • Reads instruction and data • Writes out data (after processing) • Sends control signals to other units • Receives (& acts on) interrupts 2020 EE2222 3 Memory Connection • Receives and sends data • Receives addresses (of locations) • Receives control signals • Read • Write • Timing 2020 EE2222 4 Input/Output Connection(1) • Similar to memory from computer’s viewpoint • Output • Receive data from computer • Send data to peripheral • Input • Receive data from peripheral • Send data to computer 2020 EE2222 5 Input/Output Connection(2) • Receive control signals from computer • Send control signals to peripherals • e.g. spin disk • Receive addresses from computer • e.g. port number to identify peripheral • Send interrupt signals (control) 2020 EE2222 6 What is a Bus? • A communication pathway connecting two or more devices • Usually broadcast (all components see signal) • Often grouped • A number of channels in one bus • e.g. 32 bit data bus is 32 separate single bit channels • Power lines may not be shown 2020 EE2222 7 Bus Interconnection Scheme 2020 EE2222 8 Data bus • Carries data • Remember that there is no difference between “data” and “instruction” at this level • Width is a key determinant of performance • 8, 16, 32, 64 bit 2020 EE2222 9 Address bus • Identify the source or destination of data • e.g. CPU needs to read an instruction (data) from a given location in memory • Bus width determines maximum memory capacity of system • e.g. -

Pdp11-40.Pdf
processor handbook digital equipment corporation Copyright© 1972, by Digital Equipment Corporation DEC, PDP, UNIBUS are registered trademarks of Digital Equipment Corporation. ii TABLE OF CONTENTS CHAPTER 1 INTRODUCTION 1·1 1.1 GENERAL ............................................. 1·1 1.2 GENERAL CHARACTERISTICS . 1·2 1.2.1 The UNIBUS ..... 1·2 1.2.2 Central Processor 1·3 1.2.3 Memories ........... 1·5 1.2.4 Floating Point ... 1·5 1.2.5 Memory Management .............................. .. 1·5 1.3 PERIPHERALS/OPTIONS ......................................... 1·5 1.3.1 1/0 Devices .......... .................................. 1·6 1.3.2 Storage Devices ...................................... .. 1·6 1.3.3 Bus Options .............................................. 1·6 1.4 SOFTWARE ..... .... ........................................... ............. 1·6 1.4.1 Paper Tape Software .......................................... 1·7 1.4.2 Disk Operating System Software ........................ 1·7 1.4.3 Higher Level Languages ................................... .. 1·7 1.5 NUMBER SYSTEMS ..................................... 1-7 CHAPTER 2 SYSTEM ARCHITECTURE. 2-1 2.1 SYSTEM DEFINITION .............. 2·1 2.2 UNIBUS ......................................... 2-1 2.2.1 Bidirectional Lines ...... 2-1 2.2.2 Master-Slave Relation .. 2-2 2.2.3 Interlocked Communication 2-2 2.3 CENTRAL PROCESSOR .......... 2-2 2.3.1 General Registers ... 2-3 2.3.2 Processor Status Word ....... 2-4 2.3.3 Stack Limit Register 2-5 2.4 EXTENDED INSTRUCTION SET & FLOATING POINT .. 2-5 2.5 CORE MEMORY . .... 2-6 2.6 AUTOMATIC PRIORITY INTERRUPTS .... 2-7 2.6.1 Using the Interrupts . 2-9 2.6.2 Interrupt Procedure 2-9 2.6.3 Interrupt Servicing ............ .. 2-10 2.7 PROCESSOR TRAPS ............ 2-10 2.7.1 Power Failure .............. -
Control Bus System and Application of Building Electric Zhai Long1*, Tan Bin2, Ren Min3 1.Xi’An Changqing Technology Engineering Co., Ltd., Xi'an 710018 ,China 2
ORIGINAL ARTICLE Control Bus System And Application of Building Electric Zhai Long1*, Tan Bin2, Ren Min3 1.Xi’an Changqing Technology Engineering Co., Ltd., Xi'an 710018 ,China 2. Xi'an Changqing Technology Engineering Co., Ltd., Xi'an 710018,China 3.The Fifth Oil Production Plant of Changqing Oilfield Company, Xi'an 710018,China ABSTRACT As the most important part of Building construction, the KEYWORDS electric part 's intelligent control is particularly important. the most Building electric important sign of The intelligent intelligent control is the application of Control Bus System control bus system, only select the appropriate control bus system, and CAN protocol achieve intelligent applications in buildings, elevators, fire, visualization, etc., can meet the household needs. Firstly, the design principle of the electrical control system will be described, and then the CAN - based bus system control principle and application are discussed, only used for reference. 1.Design Principles of Electric Control System Introduction As a primary prerequisite for intelligent building, For construction, the electric bus control technology is a Design of electrical control system should meet the relatively new technology. under the trend of the following principles: development of intelligent building in the future, application (1) It is needed to ensure meeting the needs under of control bus system has become the most important normal production environment . the mainstay of component of intelligent building . In the construction of the electrical system is designed to meet the production machinery and production process requirements. (2) building, the control bus system can not only make The overall design concept should be clear. -
Arithmetic and Logic Unit (ALU)
Computer Arithmetic: Arithmetic and Logic Unit (ALU) Arithmetic & Logic Unit (ALU) • Part of the computer that actually performs arithmetic and logical operations on data • All of the other elements of the computer system are there mainly to bring data into the ALU for it to process and then to take the results back out • Based on the use of simple digital logic devices that can store binary digits and perform simple Boolean logic operations ALU Inputs and Outputs Integer Representations • In the binary number system arbitrary numbers can be represented with: – The digits zero and one – The minus sign (for negative numbers) – The period, or radix point (for numbers with a fractional component) – For purposes of computer storage and processing we do not have the benefit of special symbols for the minus sign and radix point – Only binary digits (0,1) may be used to represent numbers Integer Representations • There are 4 commonly known (1 not common) integer representations. • All have been used at various times for various reasons. 1. Unsigned 2. Sign Magnitude 3. One’s Complement 4. Two’s Complement 5. Biased (not commonly known) 1. Unsigned • The standard binary encoding already given. • Only positive value. • Range: 0 to ((2 to the power of N bits) – 1) • Example: 4 bits; (2ˆ4)-1 = 16-1 = values 0 to 15 Semester II 2014/2015 8 1. Unsigned (Cont’d.) Semester II 2014/2015 9 2. Sign-Magnitude • All of these alternatives involve treating the There are several alternative most significant (leftmost) bit in the word as conventions used to -

FUNDAMENTALS of COMPUTING (2019-20) COURSE CODE: 5023 502800CH (Grade 7 for ½ High School Credit) 502900CH (Grade 8 for ½ High School Credit)
EXPLORING COMPUTER SCIENCE NEW NAME: FUNDAMENTALS OF COMPUTING (2019-20) COURSE CODE: 5023 502800CH (grade 7 for ½ high school credit) 502900CH (grade 8 for ½ high school credit) COURSE DESCRIPTION: Fundamentals of Computing is designed to introduce students to the field of computer science through an exploration of engaging and accessible topics. Through creativity and innovation, students will use critical thinking and problem solving skills to implement projects that are relevant to students’ lives. They will create a variety of computing artifacts while collaborating in teams. Students will gain a fundamental understanding of the history and operation of computers, programming, and web design. Students will also be introduced to computing careers and will examine societal and ethical issues of computing. OBJECTIVE: Given the necessary equipment, software, supplies, and facilities, the student will be able to successfully complete the following core standards for courses that grant one unit of credit. RECOMMENDED GRADE LEVELS: 9-12 (Preference 9-10) COURSE CREDIT: 1 unit (120 hours) COMPUTER REQUIREMENTS: One computer per student with Internet access RESOURCES: See attached Resource List A. SAFETY Effective professionals know the academic subject matter, including safety as required for proficiency within their area. They will use this knowledge as needed in their role. The following accountability criteria are considered essential for students in any program of study. 1. Review school safety policies and procedures. 2. Review classroom safety rules and procedures. 3. Review safety procedures for using equipment in the classroom. 4. Identify major causes of work-related accidents in office environments. 5. Demonstrate safety skills in an office/work environment. -
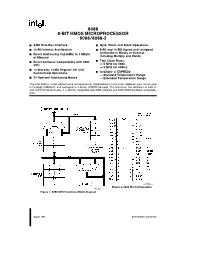
8088 8-Bit Hmos Microprocessor 8088 8088-2
8088 8-BIT HMOS MICROPROCESSOR 8088/8088-2 Y 8-Bit Data Bus Interface Y Byte, Word, and Block Operations Y 16-Bit Internal Architecture Y 8-Bit and 16-Bit Signed and Unsigned Arithmetic in Binary or Decimal, Y Direct Addressing Capability to 1 Mbyte of Memory Including Multiply and Divide Y Two Clock Rates: Y Direct Software Compatibility with 8086 CPU Ð 5 MHz for 8088 Ð 8 MHz for 8088-2 Y 14-Word by 16-Bit Register Set with Symmetrical Operations Y Available in EXPRESS Ð Standard Temperature Range Y 24 Operand Addressing Modes Ð Extended Temperature Range The Intel 8088 is a high performance microprocessor implemented in N-channel, depletion load, silicon gate technology (HMOS-II), and packaged in a 40-pin CERDIP package. The processor has attributes of both 8- and 16-bit microprocessors. It is directly compatible with 8086 software and 8080/8085 hardware and periph- erals. 231456±2 Figure 2. 8088 Pin Configuration 231456±1 Figure 1. 8088 CPU Functional Block Diagram August 1990 Order Number: 231456-006 8088 Table 1. Pin Description The following pin function descriptions are for 8088 systems in either minimum or maximum mode. The ``local bus'' in these descriptions is the direct multiplexed bus interface connection to the 8088 (without regard to additional bus buffers). Symbol Pin No. Type Name and Function AD7±AD0 9±16 I/O ADDRESS DATA BUS: These lines constitute the time multiplexed memory/IO address (T1) and data (T2, T3, Tw, T4) bus. These lines are active HIGH and float to 3-state OFF during interrupt acknowledge and local bus ``hold acknowledge''. -

Computer Organization and Architecture Designing for Performance Ninth Edition
COMPUTER ORGANIZATION AND ARCHITECTURE DESIGNING FOR PERFORMANCE NINTH EDITION William Stallings Boston Columbus Indianapolis New York San Francisco Upper Saddle River Amsterdam Cape Town Dubai London Madrid Milan Munich Paris Montréal Toronto Delhi Mexico City São Paulo Sydney Hong Kong Seoul Singapore Taipei Tokyo Editorial Director: Marcia Horton Designer: Bruce Kenselaar Executive Editor: Tracy Dunkelberger Manager, Visual Research: Karen Sanatar Associate Editor: Carole Snyder Manager, Rights and Permissions: Mike Joyce Director of Marketing: Patrice Jones Text Permission Coordinator: Jen Roach Marketing Manager: Yez Alayan Cover Art: Charles Bowman/Robert Harding Marketing Coordinator: Kathryn Ferranti Lead Media Project Manager: Daniel Sandin Marketing Assistant: Emma Snider Full-Service Project Management: Shiny Rajesh/ Director of Production: Vince O’Brien Integra Software Services Pvt. Ltd. Managing Editor: Jeff Holcomb Composition: Integra Software Services Pvt. Ltd. Production Project Manager: Kayla Smith-Tarbox Printer/Binder: Edward Brothers Production Editor: Pat Brown Cover Printer: Lehigh-Phoenix Color/Hagerstown Manufacturing Buyer: Pat Brown Text Font: Times Ten-Roman Creative Director: Jayne Conte Credits: Figure 2.14: reprinted with permission from The Computer Language Company, Inc. Figure 17.10: Buyya, Rajkumar, High-Performance Cluster Computing: Architectures and Systems, Vol I, 1st edition, ©1999. Reprinted and Electronically reproduced by permission of Pearson Education, Inc. Upper Saddle River, New Jersey, Figure 17.11: Reprinted with permission from Ethernet Alliance. Credits and acknowledgments borrowed from other sources and reproduced, with permission, in this textbook appear on the appropriate page within text. Copyright © 2013, 2010, 2006 by Pearson Education, Inc., publishing as Prentice Hall. All rights reserved. Manufactured in the United States of America. -

Over View of Microprocessor 8085 and Its Application
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-ISSN: 2278-2834,p- ISSN: 2278-8735.Volume 10, Issue 6, Ver. II (Nov - Dec .2015), PP 09-14 www.iosrjournals.org Over view of Microprocessor 8085 and its application Kimasha Borah Assistant Professor, Centre for Computer Studies Centre for Computer Studies, Dibrugarh University, Dibrugarh, Assam, India Abstract: Microprocessor is a program controlled semiconductor device (IC), which fetches, decode and executes instructions. It is versatile in application and is flexible to some extent. Nowadays, modern microprocessors can perform extremely sophisticated operations in areas such as meteorology, aviation, nuclear physics and engineering, and take up much less space as well as delivering superior performance Here is a brief review of microprocessor and its various application Key words: Semi Conductor, Integrated Circuits, CPU, NMOS ,PMOS, VLSI I. Introduction: Microprocessor is derived from two words micro and processor. Micro means small, tiny and processor means which processes something. It is a single Very Large Scale of Integration (VLSI) chip that incorporates all functions of central processing unit (CPU) fabricated on a single Integrated Circuits (ICs) (1).Some other units like caches, pipelining, floating point processing arithmetic and superscaling units are additionally present in the microprocessor and that results in increasing speed of operation.8085,8086,8088 are some examples of microprocessors(2). The technology used for microprocessor is N type metal oxide semiconductor(NMOS)(3). Basic operations of microprocessor are fetching instructions from memory ,decoding and executing them ie it takes data or operand from input device, perform arithmetic and logical operations and store results in required location or send result to output devices(1).Word size identifies the microprocessor.E.g. -

Appendix D an Alternative to RISC: the Intel 80X86
D.1 Introduction D-2 D.2 80x86 Registers and Data Addressing Modes D-3 D.3 80x86 Integer Operations D-6 D.4 80x86 Floating-Point Operations D-10 D.5 80x86 Instruction Encoding D-12 D.6 Putting It All Together: Measurements of Instruction Set Usage D-14 D.7 Concluding Remarks D-20 D.8 Historical Perspective and References D-21 D An Alternative to RISC: The Intel 80x86 The x86 isn’t all that complex—it just doesn’t make a lot of sense. Mike Johnson Leader of 80x86 Design at AMD, Microprocessor Report (1994) © 2003 Elsevier Science (USA). All rights reserved. D-2 I Appendix D An Alternative to RISC: The Intel 80x86 D.1 Introduction MIPS was the vision of a single architect. The pieces of this architecture fit nicely together and the whole architecture can be described succinctly. Such is not the case of the 80x86: It is the product of several independent groups who evolved the architecture over 20 years, adding new features to the original instruction set as you might add clothing to a packed bag. Here are important 80x86 milestones: I 1978—The Intel 8086 architecture was announced as an assembly language– compatible extension of the then-successful Intel 8080, an 8-bit microproces- sor. The 8086 is a 16-bit architecture, with all internal registers 16 bits wide. Whereas the 8080 was a straightforward accumulator machine, the 8086 extended the architecture with additional registers. Because nearly every reg- ister has a dedicated use, the 8086 falls somewhere between an accumulator machine and a general-purpose register machine, and can fairly be called an extended accumulator machine. -

Computer Organization & Architecture Eie
COMPUTER ORGANIZATION & ARCHITECTURE EIE 411 Course Lecturer: Engr Banji Adedayo. Reg COREN. The characteristics of different computers vary considerably from category to category. Computers for data processing activities have different features than those with scientific features. Even computers configured within the same application area have variations in design. Computer architecture is the science of integrating those components to achieve a level of functionality and performance. It is logical organization or designs of the hardware that make up the computer system. The internal organization of a digital system is defined by the sequence of micro operations it performs on the data stored in its registers. The internal structure of a MICRO-PROCESSOR is called its architecture and includes the number lay out and functionality of registers, memory cell, decoders, controllers and clocks. HISTORY OF COMPUTER HARDWARE The first use of the word ‘Computer’ was recorded in 1613, referring to a person who carried out calculation or computation. A brief History: Computer as we all know 2day had its beginning with 19th century English Mathematics Professor named Chales Babage. He designed the analytical engine and it was this design that the basic frame work of the computer of today are based on. 1st Generation 1937-1946 The first electronic digital computer was built by Dr John V. Atanasoff & Berry Cliford (ABC). In 1943 an electronic computer named colossus was built for military. 1946 – The first general purpose digital computer- the Electronic Numerical Integrator and computer (ENIAC) was built. This computer weighed 30 tons and had 18,000 vacuum tubes which were used for processing. -

Micro-Circuits for High Energy Physics*
MICRO-CIRCUITS FOR HIGH ENERGY PHYSICS* Paul F. Kunz Stanford Linear Accelerator Center Stanford University, Stanford, California, U.S.A. ABSTRACT Microprogramming is an inherently elegant method for implementing many digital systems. It is a mixture of hardware and software techniques with the logic subsystems controlled by "instructions" stored Figure 1: Basic TTL Gate in a memory. In the past, designing microprogrammed systems was difficult, tedious, and expensive because the available components were capable of only limited number of functions. Today, however, large blocks of microprogrammed systems have been incorporated into a A input B input C output single I.e., thus microprogramming has become a simple, practical method. false false true false true true true false true true true false 1. INTRODUCTION 1.1 BRIEF HISTORY OF MICROCIRCUITS Figure 2: Truth Table for NAND Gate. The first question which arises when one talks about microcircuits is: What is a microcircuit? The answer is simple: a complete circuit within a single integrated-circuit (I.e.) package or chip. The next question one might ask is: What circuits are available? The answer to this question is also simple: it depends. It depends on the economics of the circuit for the semiconductor manufacturer, which depends on the technology he uses, which in turn changes as a function of time. Thus to understand Figure 3: Logical NOT Circuit. what microcircuits are available today and what makes them different from those of yesterday it is interesting to look into the economics of producing microcircuits. The basic element in a logic circuit is a gate, which is a circuit with a number of inputs and one output and it performs a basic logical function such as AND, OR, or NOT. -

Intel 8255 - Wikipedia, the Free Encyclopedia
Intel 8255 - Wikipedia, the free encyclopedia http://en.wikipedia.org/wiki/Intel_8255 Intel 8255 From Wikipedia, the free encyclopedia The Intel 8255 (or i8255 ) Programmable Peripheral Interface ( PPI ) chip is a peripheral chip originally developed for the Intel 8085 microprocessor, [1] and as such is a member of a large array of such chips, known as the MCS-85 Family . This chip was later also used with the Intel 8086 and its descendants. It was later made (cloned) by many Intel D8255 other manufacturers. It is made in DIP 40 and PLCC 44 pins encapsulated versions. [2] Contents 1 Similar chips 2 Uses in computers 3 Functional block of 8255 4 Operational modes of 8255 5 Bit set/reset (BSR) mode 6 Input/Output mode 6.1 Control Word Format 6.2 Mode 0 - simple I/O 6.2.1 Mode 1 – input mode 6.2.2 Mode 0 - output mode 6.3 Mode 1 6.4 Mode 2 Pinout of i8255 7 References 8 External links Similar chips The 8255 is used to give the CPU access to programmable parallel I/O,[3] and is similar to other such chips like the MOS Technology 6522 (Versatile Interface Adapter) and the MOS Technology CIA (Complex Interface Adapter) all developed for the 6502 family. Other such chips are the 2655 Programmable Peripheral Interface from the Signetics 2650 family of microprocessors, the Motorola 6820 PIA (Peripheral Interface Adapter) from the Motorola 6800 family, the Western Design Center WDC 65C21, an enhanced 6520, and many others. However, most often the functionality 8255 offered is now not implemented with the 8255 chip itself any more, but is embedded in a larger VLSI chip as a subfunction.