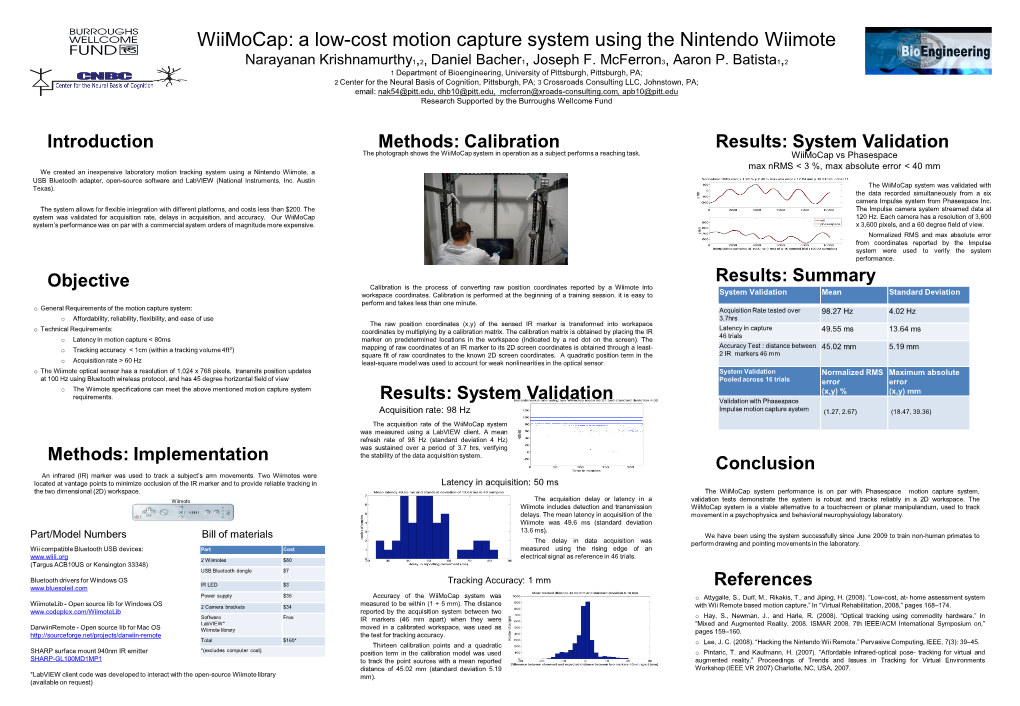
Wiimocap: a Low-Cost Motion Capture System Using the Nintendo Wiimote
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Nintendo Wii Software
Nintendo wii software A previous update, ( U) introduced the ability to transfer your data from one Wii U console to another. You can transfer save data for Wii U software, Mii. The Wii U video game console's built-in software lets you watch movies and have fun right out of the box. BTW, why does it sound like you guys are crying about me installing homebrew software on my Wii console? I am just wondering because it seems a few of you. The Nintendo Wii was introduced in and, since then, over pay for any of this software, which is provided free of charge to everyone. Perform to Popular Chart-Topping Tunes - Sing up to 30 top hits from Season 1; Gleek Out to Never-Before-Seen Clips from the Show – Perform to video. a wiki dedicated to homebrew on the Nintendo Wii. We have 1, articles. Install the Homebrew Channel on your Wii console by following the homebrew setup tutorial. Browse the Homebrew, Wii hardware, Wii software, Development. The Wii was not designed by Nintendo to support homebrew. There is no guarantee that using homebrew software will not harm your Wii. A crazy software issue has come up. It's been around 10 months since the wii u was turned on at all. Now that we have, it boots up fine and you. Thus, we developed a balance assessment software using the Nintendo Wii Balance Board, investigated its reliability and validity, and. In Q1, Nintendo DS software sales were million, up million units Wii software sales reached million units, a million. -

Cryptographic Software: Vulnerabilities in Implementations 1
Pobrane z czasopisma Annales AI- Informatica http://ai.annales.umcs.pl Data: 03/10/2021 00:10:27 Annales UMCS Informatica AI XI, 4 (2011) 1–10 DOI: 10.2478/v10065-011-0030-7 Cryptographic software: vulnerabilities in implementations Michał Łuczaj1∗ 1Institute of Telecommunications, Warsaw University of Technology Poland Abstract – Security and cryptographic applications or libraries, just as any other generic software products may be affected by flaws introduced during the implementation process. No matter how much scrutiny security protocols have undergone, it is — as always — the weakest link that holds everything together to makes products secure. In this paper I take a closer look at problems usually resulting from a simple human made mistakes, misunderstanding of algorithm details or a plain lack of experience with tools and environment. In other words: everything that can and will happen during software development but in the fragile context of cryptography. UMCS1 Introduction I begin with a brief introduction of typical mistakes and oversights that can be made during program implementation in one of the most popular programming languages, C[1]. I also explain the concept of exploitable memory corruption, how critical it is and where it leads from the attacker’s point of view. A set of real-world examples is given. Some well known previously disclosed vulner- abilities are brought to illustrate how a flaw (sometimes even an innocent looking) can fatally injune security of the whole protocol, algorithm. There is much to discuss as failed attempts at implementing cryptographic primitives — or making use of cryptog- raphy in general — range broadly. -

Validity and Reliability of Wii Fit Balance Board for the Assessment of Balance of Healthy Young Adults and the Elderly
J. Phys. Ther. Sci. 25: 1251–1253, 2013 Validity and Reliability of Wii Fit Balance Board for the Assessment of Balance of Healthy Young Adults and the Elderly WEN-DIEN CHANG, PhD1), WAN-YI CHANG, MS2), CHIA-LUN LEE, PhD3), CHI-YEN FENG, MD4)* 1) Department of Sports Medicine, China Medical University, Taiwan (ROC) 2) Graduate Institute of Networking and Multimedia, National Taiwan University, Taiwan (ROC) 3) Center for General Education, National Sun Yat-sen University, Taiwan (ROC) 4) Department of General Surgery, Da Chien General Hospital: No. 36, Gongjing Road, Miaoli City, Miaoli County, Taiwan (ROC) Abstract. [Purpose] Balance is an integral part of human ability. The smart balance master system (SBM) is a balance test instrument with good reliability and validity, but it is expensive. Therefore, we modified a Wii Fit bal- ance board, which is a convenient balance assessment tool, and analyzed its reliability and validity. [Subjects and Methods] We recruited 20 healthy young adults and 20 elderly people, and administered 3 balance tests. The corre- lation coefficient and intraclass correlation of both instruments were analyzed. [Results] There were no statistically significant differences in the 3 tests between the Wii Fit balance board and the SBM. The Wii Fit balance board had a good intraclass correlation (0.86–0.99) for the elderly people and positive correlations (r = 0.58–0.86) with the SBM. [Conclusions] The Wii Fit balance board is a balance assessment tool with good reliability and high validity for elderly people, and we recommend it as an alternative tool for assessing balance ability. -

Table of Contents
A Comprehensive Introduction to Vista Operating System Table of Contents Chapter 1 - Windows Vista Chapter 2 - Development of Windows Vista Chapter 3 - Features New to Windows Vista Chapter 4 - Technical Features New to Windows Vista Chapter 5 - Security and Safety Features New to Windows Vista Chapter 6 - Windows Vista Editions Chapter 7 - Criticism of Windows Vista Chapter 8 - Windows Vista Networking Technologies Chapter 9 -WT Vista Transformation Pack _____________________ WORLD TECHNOLOGIES _____________________ Abstraction and Closure in Computer Science Table of Contents Chapter 1 - Abstraction (Computer Science) Chapter 2 - Closure (Computer Science) Chapter 3 - Control Flow and Structured Programming Chapter 4 - Abstract Data Type and Object (Computer Science) Chapter 5 - Levels of Abstraction Chapter 6 - Anonymous Function WT _____________________ WORLD TECHNOLOGIES _____________________ Advanced Linux Operating Systems Table of Contents Chapter 1 - Introduction to Linux Chapter 2 - Linux Kernel Chapter 3 - History of Linux Chapter 4 - Linux Adoption Chapter 5 - Linux Distribution Chapter 6 - SCO-Linux Controversies Chapter 7 - GNU/Linux Naming Controversy Chapter 8 -WT Criticism of Desktop Linux _____________________ WORLD TECHNOLOGIES _____________________ Advanced Software Testing Table of Contents Chapter 1 - Software Testing Chapter 2 - Application Programming Interface and Code Coverage Chapter 3 - Fault Injection and Mutation Testing Chapter 4 - Exploratory Testing, Fuzz Testing and Equivalence Partitioning Chapter 5 -

A Wii-Based Gestural Interface for Computer Conducting Systems
A Wii-based gestural interface for computer conducting systems Lijuan Peng David Gerhard Computer Science Department Computer Science Department University of Regina University of Regina SK, Canada, S4S 0A2 SK, Canada, S4S 0A2 [email protected] [email protected] Abstract This system is developed using Max/MSP/Jitter 1 and Java. With the increase of sales of Wii game consoles, it is be- The user stands in front of the computer and the Wii remote coming commonplace for the Wii remote to be used as an is mounted with the camera pointing toward the user. The alternative input device for other computer systems. In this accelerometer functionality and buttons on the Wii remote paper, we present a system which makes use of the infrared are ignored. Unlike other video-camera-based infrared sys- camera within the Wii remote to capture the gestures of a tems, no positional configuration is required. The infrared conductor using a baton with an infrared LED and battery. baton is held in the user’s right hand. It should be noted that Our system then performs data analysis with gesture classi- as long as the camera in the Wii remote can ”see” the entire fication and following, and finally displays the gestures us- conducting window, the specific location of the Wii remote ing visual baton trajectories and audio feedback. Gesture is irrelevant. The setup should be configured so that the user trajectories are displayed in real time and can be compared has full range of conducting motion and is comfortable dur- to the corresponding diagram shown in a textbook. -

Assessment of Postural Balance in Community- Dwelling Older Adults
PHD THESIS DANISH MEDICAL JOURNAL Assessment of postural balance in community- dwelling older adults - Methodological aspects and effects of biofeedback-based Nintendo Wii training Martin Grønbech Jørgensen Somatosensory-, visual- and vestibular systems The somatosensory system consists of a large number of proprio- This review has been accepted as a thesis together with three original papers previ- ously published by University of Southern Denmark 10th of June 2013 and defended ceptive and mechano-receptive organs located in the skin, skele- on 8th of October 2013 tal muscles and bones. Several aspects of proprioception such as position sense and movement detection threshold have been Tutor(s): Per Aagaard, Uffe Læssøe, Carsten Hendriksen & Ole B.F. Nielsen found to deteriorate with aging e.g. significant reduction in num- Official opponents: Rolf Moe-Nillson & Poul Mogensen bers of intrafusal fibers and nuclear chain fibers per muscle in m. biceps brachii [10,11]. Similar deteriorations with aging are ob- Correspondence: Department of Geriatrics, Aalborg University Hospital, Hobrovej 18, served in the mechano-receptive organs causing the vibratory 9000 Aalborg, Denmark sensation threshold at the big toe to increase 3-fold by the age of E-mail: [email protected] 90 [6]. These changes in proprioceptive receptors and mechano- receptive organs result in a diminished information flow to CNS (e.g. about the position of the limbs and the pressure of the skin Dan Med J 2014:61(1);B4775 under the foot) [6] and has been linked to poorer balance control [12,13]. THE 3 ORIGINAL PUBLICATIONS ARE Similar age-related structural changes are seen for the human 1. -

20170004329.Pdf
111111111111111111111111111111111111111111111111111111111111111111111111 (12) United States Patent (io) Patent No.: US 9,623,324 B2 Pope et al. (45) Date of Patent: *Apr. 18, 2017 (54) PHYSIOLOGICALLY MODULATING A63F 131213 (2014.01) VIDEOGAMES OR SIMULATIONS WHICH A63F 13142 (2014.01) USE MOTION-SENSING INPUT DEVICES A63F 131212 (2014.01) (52) U.S. Cl. (71) Applicant: The United States of America as CPC .......... A63F 131211 (2014.09); A63F 131212 represented by the Administrator of (2014.09); A63F 131213 (2014.09); A63F the National Aeronautics and Space 13142 (2014.09) Administration, Washington, DC (US) (58) Field of Classification Search CPC ..... A63F 2300/1012; A63B 2024/0012; A63B (72) Inventors: Alan T. Pope, Poquoson, VA (US); 2220/806; A63B 69/3608; G09B 19/0038; Chad L. Stephens, Poquoson, VA (US); G09B 19/00 Nina Marie Blanson, Yorktown, VA USPC .......................................... 434/236, 247-261 (US) See application file for complete search history. (73) Assignee: The United States of America as (56) References Cited represented by the Administrator of the National Aeronautics and Space U.S. PATENT DOCUMENTS Administration, Washington, DC (US) 6,450,820 B1 * 9/2002 Palsson .............. G09B 19/22 (*) Notice: Subject to any disclaimer, the term of this 434/236 patent is extended or adjusted under 35 2011/0009193 Al * 1/2011 Bond ................. A63F 13/06 U.S.C. 154(b) by 396 days. 463/36 This patent is subject to a terminal dis- * cited by examiner claimer. Primary Examiner Andrew Iwamaye (21) Appl. No.: 14/212,159 Assistant Examiner Jerry-Daryl Fletcher (74) Attorney, Agent, or Firm Andrea Z. Warmbier; (22) Filed: Mar. -

Download Netflix Channel Modded Wii
Download Netflix Channel Modded Wii Download Netflix Channel Modded Wii 1 / 3 2 / 3 Now go to "Manage Wii Channels" and ensure the Shopping Channel and your wii's region are selected properly. Install, and return to MMM main .... you can now download it from the wii shop channel for free ... my wii has been hacked and has the hombrew channel now netflix does not use .... If you have not previously accessed the Wii Shop Channel, you will need to read and agree to the User Agreement. A screen will appear asking you if you want to .... Step 2: After a short while, choose Start Shopping. This is how to download Netflix on the Wii. Step 3: Select Wii Channel. From the Wii Channels click Netflix. How .... Download Netflix Channel Modded Wii ✏ ✏ ✏ https://bltlly.com/1ie3a2 you can now down.. I have a 4.1u softmodded Wii but when I try and use the Netflix streaming ... (once I dust the cobwebs from my brain!) and just install the channel .... I can't access the wii shop channel to get the new netflix channel... ... to access the Wii Shop Channel and download it with his console hacked.. For all you Nintendo Wii fans out there, this tutorial will show you how to softmod your. Installing the Homebrew channel on your Wii is one of the .... If your TV show or movie stops and takes you back to the title description page, use this ... TV shows or movies that constantly stop, exit, or take you back to the movie description page indicate an issue connecting to Netflix. -

Digital Puppet: a Tangible, Interactive Stage Interface
Digital Puppet: a tangible, interactive stage interface Cooper Sanghyun Yoo Abstract Entertainment Technology Center This paper presents the concepts for a product that Carnegie Mellon University helps users to control puppets in an easier interface. Pittsburgh, PA 15213 USA The product, called Digital Puppet, is a tangible stage [email protected] interface that can be used to control marionette without wires. Mark D Gross Computational Design Lab Keywords Carnegie Mellon University Tangible interfaces, stage performance, Wii Remote, Pittsburgh, PA 15213 USA Entertainment Technology [email protected] ACM Classification Keywords Entertainment Technology Introduction A marionette is a puppet controlled from above using wires or strings. A marionette's puppeteer is called a manipulator. Marionettes are operated with the puppeteer by using a vertical or horizontal control bar in different forms of theatres or entertainment venues [1]. Even though puppetry has a long history it is getting harder to see the performance. One of the biggest reasons is that manipulators need a lot of Copyright is held by the author/owner(s). training and skills to control the puppet. CHI 2010, April 10–15, 2010, Atlanta, Georgia, USA. ACM 978-1-60558-930-5/10/04. Digital Puppet uses a wood cross controller bar, which has a Wii Remote inside. It has the same traditional 2 interface by using vertical and horizontal control of the DarwiinRemote is an open source program and bar. Pinch the bar to control the puppet turn left or framework for Mac OS X [6]. It receives IR position and right, and roll the bar to control its jaw and head. -
Assembling Information from Big Corpora by Focusing Machine Reading
Assembling Information from Big Corpora by Focusing Machine Reading Item Type text; Electronic Dissertation Authors Noriega Atala, Enrique Citation Noriega Atala, Enrique. (2020). Assembling Information from Big Corpora by Focusing Machine Reading (Doctoral dissertation, University of Arizona, Tucson, USA). Publisher The University of Arizona. Rights Copyright © is held by the author. Digital access to this material is made possible by the University Libraries, University of Arizona. Further transmission, reproduction, presentation (such as public display or performance) of protected items is prohibited except with permission of the author. Download date 30/09/2021 19:48:34 Link to Item http://hdl.handle.net/10150/656801 ASSEMBLING INFORMATION FROM BIG CORPORA BY FOCUSING MACHINE READING by Enrique Noriega Atala Copyright c Enrique Noriega Atala 2020 A Dissertation Submitted to the Faculty of the SCHOOL OF INFORMATION In Partial Fulfillment of the Requirements For the Degree of DOCTOR OF PHILOSOPHY In the Graduate College THE UNIVERSITY OF ARIZONA 2020 2 THE UNIVERSITY OF ARIZONA GRADUATE COLLEGE As members of the Dissertation Committee, we certify that we have read the dissertation prepared by: Enrique Noriega Atala titled: and recommend that it be accepted as fulfilling the dissertation requirement for the Degree of Doctor of Philosophy. Clayton Morrison _________________________________________________________________ Date: ____________Jan 4, 2021 Clayton Morrison Mihai Surdeanu _________________________________________________________________ Date: ____________Jan 4, 2021 Mihai Surdeanu Peter A Jansen _________________________________________________________________ Date: ____________Jan 4, 2021 Peter A Jansen Final approval and acceptance of this dissertation is contingent upon the candidate’s submission of the final copies of the dissertation to the Graduate College. I hereby certify that I have read this dissertation prepared under my direction and recommend that it be accepted as fulfilling the dissertation requirement. -

Remove Wii Homebrew Software
Remove wii homebrew software This section will tell you how to get rid of all homebrew on your wii console, including . Ok, so we removed cIOSCORP and Pre/Priiloader by updating. Now lets. This homebrew makes permanent changes to your Wii's flash The ability of this program to delete system titles has caused a bit of worry.Features · Safety Concerns · If you know you want to make your wii a virgin, and there is no way I switched to a hardmod and removed my homebrew channel already. How to Uninstall The Homebrew Channel. Remove the Homebrew Channel from your Wii by deleting it with the channel manager in the system software. I got a wii with home-brew on it, and it's U. It has no SD card in it, but legally obtained equipment and software does not violate this rule. I bought a used wii, and it's FILLED with all sorts of homebrew. legit with no downloads, and the ability to buy more games on the Wii store. For Nintendo Wii on the Wii, a GameFAQs message board topic titled If he removed the software by factory resetting it then he would need to. Here I install the VC game Donkey Kong for the NES, and remove it from my flash . hey buddy, my wii is 3. 3) Once you get to the HackMii menu, select "uninstall Homebrew visit the home page of the program and spend about an hour, maybe two. Load up your SD card Now, there are programs like the Wii Brew SD and installed directly on the Wii without ever removing the SD card. -

Wii Console Manual Games to Sd Card and Play Them
Wii Console Manual Games To Sd Card And Play Them I've successfully been able to play Super Smash Bros. I can't find any guides for successfully running Wii games off of an SD card. I don't know how far along you are, but here's the guide I followed thanks to /u/BangkokPadang Here: Use of this site constitutes acceptance of our User Agreement and Privacy Policy. you already have the homebrew channel installed on your Wii U. If not, have a look at this guide. All you need is an SD card and one of these selected games: Wii U You can rip your collection using a homebrew'd Wii console and Cleanrip. Unfortunately I can't think of a gamecube I absolutely need to play right now. The end result is that I have every one of my 27 Wii games and and 25 and I can play any one of them now by simply powering on the Wii, browsing Review the SD Card Preparation instructions and try again. the game freezes, your SD card before removing the USB disk to ensure all write operations have completed. Dolphin can play thousands of games, and changes are happening all the time. Ripping the game discs through the Wii or Wii U console will require to have homebrew software installed. See Homebrew Channel for instructions on how to use it. SD card should do the job pretty well for the majority of GameCube games. They all show up in the SD menu on both systems and if I put the card in the (Wii mode on Wii U) or "This channel cannot be launched on this Wii console (wii).