General Issue
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Galaktika Group: Orbital City «EFIR» «Ethereal Dwelling» Space Colony Concept by Tsiolkovsky
Galaktika group: Orbital city «EFIR» «ethereal dwelling» space colony concept by tsiolkovsky BASIC PRINCIPLES OF CONSTRUCTING A SPACE COLONY UPON THE CONCEPT BY K.E. TSIOLKOVSKY: IN-SPACE ASSEMBLING MANKIND WILL NOT FOREVER REMAIN ON EARTH, BUT IN THE PURSUIT OF LIGHT AND SPACE WILL FIRST USING MATERIALS FROM PLANETS AND ASTEROIDS TIMIDLY EMERGE FROM THE BOUNDS OF THE ATMOSPHERE, AND THEN ADVANCE UNTIL HE HAS CONQUERED THE WHOLE ARTIFICIAL GRAVITY OF CIRCUMSOLAR SPACE. PLANTS CULTIVATION HE PRESENTED HIS RESEARCHES IN THE BOOKS: BEYOND THE PLANET EARTH, BIOLOGICAL LIFE IN COSMOS, ETHEREAL ISLAND, ETC. COLONY CONCEPTS [SHORT] REVIEW BERNAL'S SPHERE, STANFORD TORUS, O’NEILL’S CYLINDER BERNAL’S SPHERE STANFORD TORUS O’NEILL’S CYLINDER JOHN DESMOND BERNAL 1929 POPULATION: STUDENTS OF THE STANFORD UNIVERSITY 1975 GERARD K. O'NEILL, 1979 POPULATION: 20 MLN. 20—30 THOUSAND INHABITANTS DIAMETER POPULATION: 10 THND. AND MORE INHABITANTS INHABITANTS DIAMETER OF CYLINDERS: 6.4 KM ABOUT 16 KM DIAMETER1.8KM AND MORE LENGTH OF CYLINDERS: 32 KM ORBITAL CITY «EFIR» scheme and characteristics TOP VIEW residential torus ASSEMBLY DOCK radiators electric power station elevator 10,000 INHABITANTS DIAMETER OF TORUS – 2 KILOMETRES variable gravity module MASS OF ORBITAL CITY – 25 MLN. TONS RESIDENTIAL AREA DESCRIPTION OF THE INTERIOR AREA RESIDENTIAL AREA CHARACTERISTICS DIAMETER OF TORUS - 2 KILOMETRES ROTATION PERIOD - ONE FULL-CIRCLE TURN PER 63 SECONDS RESIDENTIAL AREA WIDTH - 300 METERS RESIDENTIAL AREA HEIGHT - 150 METERS AREA OF RESIDENTIAL ZONE - 200 HA MAXIMUM POPULATION - 10-40 THOUSAND DESIGNED POPULATION DENSITY IS 50 PEOPLE/HA TO 200 PEOPLE/HA RESIDENTIAL AREA DESCRIPTION OF THE INTERIOR AREA LOGISTICS transport plans for passengers and cargoes ORBITAL CITY AT THE LAGRANGIAN POINT INTERPLANETARY 25 MLN. -

Robert Hooke
? Robert Hooke (1635-1703) Arguably the greatest experimental natural philosopher of the 17th century • His most famous work is Micrographia, in which he coined the term "cell" for a basic biological structure. Biography • Robert Hooke, the son of a clergyman in Freshwater on the Isle of Wight, was born on July 18, 1635. • When he was 13, he left an orphan with a modest inheritance, and entered Westminster School. • Later he earned his way • as a chorister at Christ Church, Oxford, and attended Westminster College, graduating with his master's degree in 1663. Biography • Hooke remained at Oxford, where he became assistant to Robert Boyle. • Together they conducted many experiments on the effects of reduced air pressure, using an air pump that had been designed and constructed by Hooke. Biography… Founded in 1660, the Royal Society is the independent • In 1662 Hooke became scientific academy of the curator of the newly UK, dedicated to promoting founded Royal Society, excellence in science. his duties being to produce three or four significant experimental demonstrations for each weekly meeting of the society. • He was ideally suited for such work, and his career thereafter was immensely active and fertile. Biography… • At Westminster Hooke was said to have acquired mastery of ancient languages, learned to play the organ, 'contrived severall ways of flying', and mastered the first six books of Euclid's Elements. Biography… • 1665 he was appointed Professor of Geometry and carried out astronomical observations, and was also elected FRS. In 1677 he became the Secretary to the Royal Society. Hooke versus Newton • In his Attempt to Prove the Motion of the Earth (1674), he offered a theory of planetary motion based on the correct principle of inertia and a balance between an outward centrifugal force and an inward gravitational attraction to the Sun. -

California State University, Northridge Low Earth Orbit
CALIFORNIA STATE UNIVERSITY, NORTHRIDGE LOW EARTH ORBIT BUSINESS CENTER A Project submitted in partial satisfaction of the requirements for the degree of Master of Science in Engineering by Dallas Gene Bienhoff May 1985 The Proj'ectof Dallas Gene Bienhoff is approved: Dr. B. J. Bluth Professor T1mothy Wm. Fox - Chair California State University, Northridge ii iii ACKNOWLEDGEHENTS I wish to express my gratitude to those who have helped me over the years to complete this thesis by providing encouragement, prodding and understanding: my advisor, Tim Fox, Chair of Mechanical and Chemical Engineering; Dr. B. J. Bluth for her excellent comments on human factors; Dr. B. J. Campbell for improving the clarity; Richard Swaim, design engineer at Rocketdyne Division of Rockwell International for providing excellent engineering drawings of LEOBC; Mike Morrow, of the Advanced Engineering Department at Rockwell International who provided the Low Earth Orbit Business Center panel figures; Bob Bovill, a commercial artist, who did all the artistic drawings because of his interest in space commercialization; Linda Martin for her word processing skills; my wife, Yolanda, for egging me on without nagging; and finally Erik and Danielle for putting up with the excuse, "I have to v10rk on my paper," for too many years. iv 0 ' PREFACE The Low Earth Orbit Business Center (LEOBC) was initially conceived as a modular structure to be launched aboard the Space Shuttle, it evolved to its present configuration as a result of research, discussions and the desire to increase the efficiency of space utilization. Although the idea of placing space stations into Earth orbit is not new, as is discussed in the first chapter, and the configuration offers nothing new, LEOBC is unique in its application. -
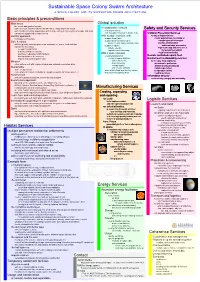
Sustainable Space Colony Swarm Architecture
Sustainable Space Colony Swarm Architecture A SPACE COLONY AND ITS SUPPORTING SWARM ARCHITECTURE Basic principles & preconditions Main focus Global solution the needs and goals of people sufficient room and the natural habitat that our body and mind needs A collaborative network Safety and Security Services with a sufficiently large population, with a large variety in ages, types of people and skills of a space colony extensively supported on many levels and its supporting swarm architecture Collision Prevention Services Holistic approach With multiple habitats, with for object impact defense, multi-layer architecture support from Earth mostly autonomous, consisting of Safe & robust support from celestial bodies: multiple types of telescopes Moon, Venus, Mars and Asteroids distributed information artificial gravity, radiation protection, atmosphere, water, food and light support in space: and knowledge processing robustness by default: safety, energy, flight vector adjustment services, compartmentalization, logistics, manufacturing by autonomous unit(s) distributed implementation, cloud overblow facility multilayer redundancy with fallback, With a space armada backup facilities & resources at Lagrangian points: Remote controlled repairs fleet impact and collision prevention clouds of space stations, Environment sustainability services with settlements, Mindset for humans, flora and fauna manufacturing, either safe or not, with regular internal and external evacuation drills air and water purification energy supply artificial gravity provisioning -
The Evolution of Tower Clock Movements and Their Design Over the Past 1000 Years
The Evolution Of Tower Clock Movements And Their Design Over The Past 1000 Years Mark Frank Copyright 2013 The Evolution Of Tower Clock Movements And Their Design Over The Past 1000 Years TABLE OF CONTENTS Introduction and General Overview Pre-History ............................................................................................... 1. 10th through 11th Centuries ........................................................................ 2. 12th through 15th Centuries ........................................................................ 4. 16th through 17th Centuries ........................................................................ 5. The catastrophic accident of Big Ben ........................................................ 6. 18th through 19th Centuries ........................................................................ 7. 20th Century .............................................................................................. 9. Tower Clock Frame Styles ................................................................................... 11. Doorframe and Field Gate ......................................................................... 11. Birdcage, End-To-End .............................................................................. 12. Birdcage, Side-By-Side ............................................................................. 12. Strap, Posted ............................................................................................ 13. Chair Frame ............................................................................................. -
Ground Into Sky: the Topology of Interstellar
The Avery Review Fred scharmen – Ground into Sky: The Topology of Interstellar Christopher Nolan’s Interstellar was nominated for five Oscars. The Citation: Fred Scharmen, “Ground Into Sky: The Topology of Interstellar,” in The Avery Review, no. 6 movie won the Oscar for Best Visual Effects, many of which were created with (March 2015), http://averyreview.com/issues/6/ analog camera techniques. It has been controversial for its use of emotional ground-into-sky. themes, and its scientific accuracy. The physics in the film is either shockingly sloppy, or accurate enough to generate new peer-reviewed research, depend- ing on which review you read. [1] [2] But the best and most curious thing about [1] Phil Plait, “Interstellar Science: What the movie gets wrong and really wrong about black Interstellar is its topology. holes, relativity, plot, and dialogue,” Slate, http:// Again and again, in different ways, we see the ground lifting up to www.slate.com/articles/health_and_science/ space_20/2014/11/interstellar_science_review_ become the sky. The first appearance of this effect is early in the movie—the the_movie_s_black_holes_wormholes_relativity.html, horizon-obliterating dust storms that sweep across the American Midwest. accessed February 24, 2015. Cooper (the main character) and his family are at a baseball game when a dust [2]: Adam Rogers, “Wrinkles in Spacetime: The Warped Astrophysics of Interstellar,” Wired, http:// storm rises, looming like a growing mountain. Drought and blight have killed the www.wired.com/2014/10/astrophysics-interstellar- plant life that binds the soil, the near-future world of the movie has become a black-hole/, accessed February 24, 2015. -

The Shape of Space: NASA Designs for Orbital Space Settlements.Pdf
The Shape of Space: NASA Designs for Orbital Space Settlements 12/16/18, 12:37 PM YOU ARE READING AN ARTICLE PRINTED FROM PLACES, THE JOURNAL OF PUBLIC SCHOLARSHIP ON ARCHITECTURE, LANDSCAPE, AND URBANISM. READ MORE AT PLACESJOURNAL.ORG. The Shape of Space What the orbital space habitats designed for NASA in 1975 can teach us about living in new geometries. FRED SCHARMEN AUGUST 2018 Bernal Sphere, 1975. [Rick Guidice/Nasa Ames Research Center] “The sky starts at your feet. Think how brave you are to walk around.” 1 — Anne Herbert “Space is not only high, it’s low. It’s a bottomless pit.” 2 — Sun Ra Buckminster Fuller had an unusual way of talking about stairs. Instead of downstairs and upstairs, he encouraged people to say instairs and outstairs. “They all laugh about it,” he wrote, “But if they try saying in and out for a few days in fun, they find themselves beginning to realize that they are indeed going inward and outward in respect to the center of Earth, which is our Spaceship Earth. And for the first time they begin to feel real 3 reality.” Writing in 1970, at the dawn of extra-planetary space travel, Fuller identified a break in humans’ spatial perception. Standing on Earth, we see the ground plane as flat, but we know the planet is a sphere. To describe motion and existence in a vast universe, where planetary surfaces are the exception, we would need a new language. For centuries, the space away from the Earth’s surface — “outer” space — has confounded attempts to make sense of it with terrestrial geometric schemes. -
Kalpana One: What Will It Be Like to Live in Space?
FALL 2013 KALPANA ONE What Will It Be Like to Live in Space? Laid-Back Impatience: ISDC Update Island Hopping to Mars If Apollo Happened Today CONTENTS FALL 2013 FALL 2013 KALPANA ONE What Will It Be Like to Live in Space? Laid-Back Impatience: ISDC Update Island Hopping to Mars If Apollo Happened Today Cover Image Kalpana One is intended to improve on the orbital space settlement designs of the mid-1970s. The Kalpana One structure is a cylinder with a radius of 250 meters and a length of 325 meters. The population target is 3,000 residents. IMAGE CREDIT: © BRYAN VERSTEEG / SPACEHAbs.COM The Kalpana One interior living space has Earth-nor- mal pseudo-gravity provided by the twice-per-minute rotation of the settlement. IMAGE CREDIT: © BRYAN VERSTEEG / SPACEHAbs.COM FEATURES 14 KALPANA ONE: 34 ESA’S MULTIFUNCTIONAL SPACESHIP WHAT WILL IT BE LIKE TO LIVE IN SPACE? By Mark Williamson By Al Globus 38 MAKING THE BUSINEss CASE FOR SPACE 20 LAID-BACK IMPATIENCE AT THE SPACE TECH EXPO ISDC UPDATE By Jim Plaxco By Cliff McMurray 40 WORLD SPACE WEEK 2013: 24 IsLAND HOPPING TO MARS EXPLORING MARS, DISCOVERING EARTH By Michael Raftery By Luisa Fernanda Zambrano-Marin, Dr. Phillip Dukes 30 IF APOLLO HAPPENED TODAY By Marianne J. Dyson DEPARTMENTS 9 LETTER FROM THE 42 NSS AWARDS 47 SPACE SETTLEMENT PUBLISHER HONOREES AT COLUMN THE 2013 ISDC By Rick N. Tumlinson 10 LETTER FROM By John Strickland THE ISDC CHAIR 48 BOOKS 44 THE NEXT GENERATION: Reviews from Marianne Dyson 11 NSS CORRESPONDENCE STUDENTS AT ISDC 2013 & Allen G. -

Teacher Exhibition Notes Moving to Mars
TEACHER EXHIBITION NOTES MOVING TO MARS 18 OCTOBER 2019 - 23 FEBRUARY 2020 TEACHER NOTES These teacher notes are extracted from the exhibition text. The introduction, section headers and captions are as found in Moving to Mars. The exhibition is split into six sections within which sub sections focus on key groups of objects such as ‘Pressure suits and spacesuits’ and ‘Eating in Space’. These sections are represented in these notes but the expanded text can be found in the exhibition. A few exhibits from each category have been selected to enable you to guide your students’ journey around the exhibition and point of some exhibits of interest as you go. If you would like a more in-depth look around the exhibition, then you may be a free preliminary visit once you have made your group booking. We do not run tours of our galleries but our visitor experience assistants who are based in the galleries are knowledgeable on much of the content. Photography and cinematography is permitted in the gallery without the use of a flash. Dry sketching is allowed. No food or drink is allowed in the gallery. Please do not touch any objects unless instructed to do so in gallery signage. 1. IMAGANING MARS Mars is the most striking planet in the night sky. Its reddish glow and wandering motion fascinated ancient astronomers. Mars promised fire, destruction and war. From early maps to Hollywood film posters, the ways we have represented the Red Planet reflect our shifting understanding of it. As telescopes developed, astronomers could read Mars more deeply. -
Sayan Kar Dept. of Physics & CTS IIT Kharagpur
HOW WELL DO WE KNOW THE GRAVITATIONAL CONSTANT? Sayan Kar Dept. of Physics & CTS IIT Kharagpur KNOWING G WELL? Measurements of G. • Variation in time and space. • G in higher dimensions. • THE GRAVITATIONAL CONSTANT, G Newton’s 1687 law (in todays form) F~ = GMm rˆ − r2 Robert Hooke also knew! 1 3 2 [G] = M− L T − Newton never mentioned G in his Prin- cipia.• He mainly worked with ratios. In 1798, Henry Cavendish measured the density• of the Earth from which one can infer the value of G. G as a universal constant was first men- • tioned with the name f in 1873 by Alfred Cornu and Baptistin Baile. In 1894 Charles V. Boys first mentioned G• as the universal Newtonian constant of gravitation in a paper in Nature. THE VALUE OF G (CODATA 2014). G =6.67408(31) 10 11 m3/kg.s2 × − Standard uncertainty in G: 0.00031 10 11 m3kg 1s 2. × − − − Standard uncertainty in Planck’s con- • stant h is 0.000000081 10 34 J.s. × − The speed of light in vacuum, is exact • 1 c = 299792458 ms− since length of a metre and the standard of time are fixed by using it. G is known only upto three decimal places. • Far worse than any other fundamental con- stant (say, c or ¯h). MEASURING G: SUMMARY From ‘Precision measurement of the Newtonian gravitational constant using cold atoms’ by Rosi et. al., Nature 510, 518521 (26 June 2014) CAVENDISH 1798 The geologist John Michell (1724-1793) • developed the torsion balance set-up. Cavendish inherited it from Wollaston • around 1797 and made minor modifica- tions. -

THE RINGS of the EARTH Reyes González JM Dr. Archi
67rd International Astronautical Congress, Guadalajara, Mexico. 2016 by the International Astronautical Federation. IAC-16,D3,IP,3,x32256 Life beyond Earth: THE RINGS OF THE EARTH Reyes González JM Dr. Architect, lecturer at Alfonso X El Sabio University, Spain, [email protected] Cobo Arevalo A. PhD. candidate Architect at U.Politechnique de Madrid, Spain, [email protected] JM de Prada Poole’s (1) Orbital Megalopolis envisions 5 concentric rings of circular cross-section, in orbit at an average height of 35.750 km above the Earth's crust (like the rings around Saturn, but with different dimensions and a different objective). Each of these rings functions in the same way as a 84.330 km diameter torus, hosting a population of 2,500 million people and providing for all their needs in its interior. The main aim of the project is to empty planet Earth of most of its human population, and thus allow the biosphere to continue its natural evolution without having to bear the harmful interference and burden of humankind. This article describes the composition and size of one of these rings, and compares its parts with other similar ones already built by the human species. It begins with a brief explanation of the historical background and an introduction discussing demographic development over the last two centuries and its most immediate consequences. I. ZERO PEOPLE Air pollution, the hole in the ozone layer, degraded soil, deforestation, marine pollution, rising temperatures, drought, biodiversity loss …. 25 years after the Rio-92 2nd "Earth Summit" and its "declaration on environment and development", governments and the governed have hardly progressed at all. -

Astrotecture™ Marc M. Cohen, Architect P.C. a California Professional Service Corporation 4260 Terman Drive #104 Palo Alto, CA 94306
Astrotecture™ Marc M. Cohen, Architect P.C. a California professional service corporation 4260 Terman Drive #104 Palo Alto, CA 94306 Presentation to the Future of In-Space Operations (FISO) 11 May 2011 © 2011 Marc M. Cohen, Architect P.C. 1. The Five Showstoppers for Mars (18th IAA Humans in Space Symposium, Houston 15 April 2011). 2. First Mars Habitat Architecture (18th IAA Humans in Space Symposium, Houston 15 April 2011). 3. Deep Space Habitation: Asteroids, Mars, Moons (National Academy of Science – NASA Technology Roadmaps, Houston, 27 April 2011) 4. International Collaboration on Analog Utilization Workshop (USRA/NASA, Houston 7-8 April 2011) 5. The Key to Scientifically Valid Habitat & Analog Studies: Asking Big Questions 6. Conclusion © 2011 Marc M. Cohen, Architect P.C. Astrotecture™ Marc M. Cohen, Architect P.C. a California professional service corporation 4260 Terman Drive #104 Palo Alto, CA 94306 http://www.astrotecture.com Presentation to the 18th International Astronautics Academy Symposium on Humans in Space 15 April 2011 Houston TX USA © 2011 Marc M. Cohen, Architect P.C. ! Threats to human health and safety can prevent a human Mars mission from succeeding or even starting: • Hypogravity • Radiation • Need for Regenerative & Bioregenerative Life Support • Mars Dust • Planetary Protection ! There is still a worry (¿Wishful Thinking?) in the Human Research Community that someday NASA will launch a crash program for a Mars mission without doing 1930 Noordung Torus: the essential research. Artificial G UV protection, © 2011 Marc M. Cohen, Architect P.C. Human-Machine Interface. ! J. R. Ball, C. H. Evans (Eds.) Institute of Medicine (2001). Safe ! NRC (2000c).