Aerospace Meridian Asm Venus Aerospace Meridian
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Apparent Size of Celestial Objects
NATURE [April 7, 1870 daher wie schon fri.jher die Vor!esungen Uber die Warme, so of rectifying, we assume. :J'o me the Moon at an altit11de of auch jetzt die vorliegenden Vortrage Uber d~n Sc:hall unter 1~rer 45° is about (> i!lches in diameter ; when near the horizon, she is besonderen Aufsicht iibersetzen lasse~, und die :On1ckbogen e1µer about a foot. If I look through a telescope of small ruag11ifyjng genauen Durchsicht unterzogen, dam1t auch die deutsche J3ear power (say IO or 12 diameters), sQ as to leave a fair margin in beitung den englischen Werken ihres Freundes Tyndall nach the field, the Moon is still 6 inches in diameter, though her Form und Inhalt moglichst entsprache.-H. :fIEL!>iHOLTZ, G. visible area has really increased a hundred:fold. WIEDEMANN." . Can we go further than to say, as has often been said, that aH Prof. Tyndall's work, his account of Helmhqltz's Theory of magnitudi; is relative, and that nothing is great or small except Dissonance included, having passed through the hands of Helm by comparison? · · W. R. GROVE, holtz himself, not only without protest or correction, bnt with u5, Harley Street, April 4 the foregoing expression of opinion, it does not seem lihly that any serious dimag'e has been done.] · An After Pirm~. Jl;xperim1mt SUPPOSE in the experiment of an ellipsoid or spheroid, referred Apparent Size of Celestial Qpjecti:; to in my last letter, rolling between two parallel liorizontal ABOUT fifteen years ago I was looking at Venus through a planes, we were to scratch on the rolling body the two equal 40-inch telescope, Venus then being very near the Moon and similar and opposite closed curves (the polhods so-called), traced of a crescent form, the line across the middle or widest part upon it by the successive axes of instantaneou~ solutioll ; and of the crescent being about one-tenth of the planet's diameter. -

Galaktika Group: Orbital City «EFIR» «Ethereal Dwelling» Space Colony Concept by Tsiolkovsky
Galaktika group: Orbital city «EFIR» «ethereal dwelling» space colony concept by tsiolkovsky BASIC PRINCIPLES OF CONSTRUCTING A SPACE COLONY UPON THE CONCEPT BY K.E. TSIOLKOVSKY: IN-SPACE ASSEMBLING MANKIND WILL NOT FOREVER REMAIN ON EARTH, BUT IN THE PURSUIT OF LIGHT AND SPACE WILL FIRST USING MATERIALS FROM PLANETS AND ASTEROIDS TIMIDLY EMERGE FROM THE BOUNDS OF THE ATMOSPHERE, AND THEN ADVANCE UNTIL HE HAS CONQUERED THE WHOLE ARTIFICIAL GRAVITY OF CIRCUMSOLAR SPACE. PLANTS CULTIVATION HE PRESENTED HIS RESEARCHES IN THE BOOKS: BEYOND THE PLANET EARTH, BIOLOGICAL LIFE IN COSMOS, ETHEREAL ISLAND, ETC. COLONY CONCEPTS [SHORT] REVIEW BERNAL'S SPHERE, STANFORD TORUS, O’NEILL’S CYLINDER BERNAL’S SPHERE STANFORD TORUS O’NEILL’S CYLINDER JOHN DESMOND BERNAL 1929 POPULATION: STUDENTS OF THE STANFORD UNIVERSITY 1975 GERARD K. O'NEILL, 1979 POPULATION: 20 MLN. 20—30 THOUSAND INHABITANTS DIAMETER POPULATION: 10 THND. AND MORE INHABITANTS INHABITANTS DIAMETER OF CYLINDERS: 6.4 KM ABOUT 16 KM DIAMETER1.8KM AND MORE LENGTH OF CYLINDERS: 32 KM ORBITAL CITY «EFIR» scheme and characteristics TOP VIEW residential torus ASSEMBLY DOCK radiators electric power station elevator 10,000 INHABITANTS DIAMETER OF TORUS – 2 KILOMETRES variable gravity module MASS OF ORBITAL CITY – 25 MLN. TONS RESIDENTIAL AREA DESCRIPTION OF THE INTERIOR AREA RESIDENTIAL AREA CHARACTERISTICS DIAMETER OF TORUS - 2 KILOMETRES ROTATION PERIOD - ONE FULL-CIRCLE TURN PER 63 SECONDS RESIDENTIAL AREA WIDTH - 300 METERS RESIDENTIAL AREA HEIGHT - 150 METERS AREA OF RESIDENTIAL ZONE - 200 HA MAXIMUM POPULATION - 10-40 THOUSAND DESIGNED POPULATION DENSITY IS 50 PEOPLE/HA TO 200 PEOPLE/HA RESIDENTIAL AREA DESCRIPTION OF THE INTERIOR AREA LOGISTICS transport plans for passengers and cargoes ORBITAL CITY AT THE LAGRANGIAN POINT INTERPLANETARY 25 MLN. -

General Issue
Journal of the British Interplanetary Society VOLUME 72 NO.5 MAY 2019 General issue A REACTION DRIVE Powered by External Dynamic Pressure Jeffrey K. Greason DOCKING WITH ROTATING SPACE SYSTEMS Mark Hempsell MARTIAN DUST: the Formation, Composition, Toxicology, Astronaut Exposure Health Risks and Measures to Mitigate Exposure John Cain THE CONCEPT OF A LOW COST SPACE MISSION to Measure “Big G” Roger Longstaff www.bis-space.com ISSN 0007-084X PUBLICATION DATE: 26 JULY 2019 Submitting papers International Advisory Board to JBIS JBIS welcomes the submission of technical Rachel Armstrong, Newcastle University, UK papers for publication dealing with technical Peter Bainum, Howard University, USA reviews, research, technology and engineering in astronautics and related fields. Stephen Baxter, Science & Science Fiction Writer, UK James Benford, Microwave Sciences, California, USA Text should be: James Biggs, The University of Strathclyde, UK ■ As concise as the content allows – typically 5,000 to 6,000 words. Shorter papers (Technical Notes) Anu Bowman, Foundation for Enterprise Development, California, USA will also be considered; longer papers will only Gerald Cleaver, Baylor University, USA be considered in exceptional circumstances – for Charles Cockell, University of Edinburgh, UK example, in the case of a major subject review. Ian A. Crawford, Birkbeck College London, UK ■ Source references should be inserted in the text in square brackets – [1] – and then listed at the Adam Crowl, Icarus Interstellar, Australia end of the paper. Eric W. Davis, Institute for Advanced Studies at Austin, USA ■ Illustration references should be cited in Kathryn Denning, York University, Toronto, Canada numerical order in the text; those not cited in the Martyn Fogg, Probability Research Group, UK text risk omission. -

Introduction to Astronomy from Darkness to Blazing Glory
Introduction to Astronomy From Darkness to Blazing Glory Published by JAS Educational Publications Copyright Pending 2010 JAS Educational Publications All rights reserved. Including the right of reproduction in whole or in part in any form. Second Edition Author: Jeffrey Wright Scott Photographs and Diagrams: Credit NASA, Jet Propulsion Laboratory, USGS, NOAA, Aames Research Center JAS Educational Publications 2601 Oakdale Road, H2 P.O. Box 197 Modesto California 95355 1-888-586-6252 Website: http://.Introastro.com Printing by Minuteman Press, Berkley, California ISBN 978-0-9827200-0-4 1 Introduction to Astronomy From Darkness to Blazing Glory The moon Titan is in the forefront with the moon Tethys behind it. These are two of many of Saturn’s moons Credit: Cassini Imaging Team, ISS, JPL, ESA, NASA 2 Introduction to Astronomy Contents in Brief Chapter 1: Astronomy Basics: Pages 1 – 6 Workbook Pages 1 - 2 Chapter 2: Time: Pages 7 - 10 Workbook Pages 3 - 4 Chapter 3: Solar System Overview: Pages 11 - 14 Workbook Pages 5 - 8 Chapter 4: Our Sun: Pages 15 - 20 Workbook Pages 9 - 16 Chapter 5: The Terrestrial Planets: Page 21 - 39 Workbook Pages 17 - 36 Mercury: Pages 22 - 23 Venus: Pages 24 - 25 Earth: Pages 25 - 34 Mars: Pages 34 - 39 Chapter 6: Outer, Dwarf and Exoplanets Pages: 41-54 Workbook Pages 37 - 48 Jupiter: Pages 41 - 42 Saturn: Pages 42 - 44 Uranus: Pages 44 - 45 Neptune: Pages 45 - 46 Dwarf Planets, Plutoids and Exoplanets: Pages 47 -54 3 Chapter 7: The Moons: Pages: 55 - 66 Workbook Pages 49 - 56 Chapter 8: Rocks and Ice: -

California State University, Northridge Low Earth Orbit
CALIFORNIA STATE UNIVERSITY, NORTHRIDGE LOW EARTH ORBIT BUSINESS CENTER A Project submitted in partial satisfaction of the requirements for the degree of Master of Science in Engineering by Dallas Gene Bienhoff May 1985 The Proj'ectof Dallas Gene Bienhoff is approved: Dr. B. J. Bluth Professor T1mothy Wm. Fox - Chair California State University, Northridge ii iii ACKNOWLEDGEHENTS I wish to express my gratitude to those who have helped me over the years to complete this thesis by providing encouragement, prodding and understanding: my advisor, Tim Fox, Chair of Mechanical and Chemical Engineering; Dr. B. J. Bluth for her excellent comments on human factors; Dr. B. J. Campbell for improving the clarity; Richard Swaim, design engineer at Rocketdyne Division of Rockwell International for providing excellent engineering drawings of LEOBC; Mike Morrow, of the Advanced Engineering Department at Rockwell International who provided the Low Earth Orbit Business Center panel figures; Bob Bovill, a commercial artist, who did all the artistic drawings because of his interest in space commercialization; Linda Martin for her word processing skills; my wife, Yolanda, for egging me on without nagging; and finally Erik and Danielle for putting up with the excuse, "I have to v10rk on my paper," for too many years. iv 0 ' PREFACE The Low Earth Orbit Business Center (LEOBC) was initially conceived as a modular structure to be launched aboard the Space Shuttle, it evolved to its present configuration as a result of research, discussions and the desire to increase the efficiency of space utilization. Although the idea of placing space stations into Earth orbit is not new, as is discussed in the first chapter, and the configuration offers nothing new, LEOBC is unique in its application. -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -

Models for Earth and Maps
Earth Models and Maps James R. Clynch, Naval Postgraduate School, 2002 I. Earth Models Maps are just a model of the world, or a small part of it. This is true if the model is a globe of the entire world, a paper chart of a harbor or a digital database of streets in San Francisco. A model of the earth is needed to convert measurements made on the curved earth to maps or databases. Each model has advantages and disadvantages. Each is usually in error at some level of accuracy. Some of these error are due to the nature of the model, not the measurements used to make the model. Three are three common models of the earth, the spherical (or globe) model, the ellipsoidal model, and the real earth model. The spherical model is the form encountered in elementary discussions. It is quite good for some approximations. The world is approximately a sphere. The sphere is the shape that minimizes the potential energy of the gravitational attraction of all the little mass elements for each other. The direction of gravity is toward the center of the earth. This is how we define down. It is the direction that a string takes when a weight is at one end - that is a plumb bob. A spirit level will define the horizontal which is perpendicular to up-down. The ellipsoidal model is a better representation of the earth because the earth rotates. This generates other forces on the mass elements and distorts the shape. The minimum energy form is now an ellipse rotated about the polar axis. -
Sustainable Space Colony Swarm Architecture
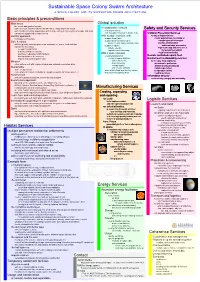
Sustainable Space Colony Swarm Architecture A SPACE COLONY AND ITS SUPPORTING SWARM ARCHITECTURE Basic principles & preconditions Main focus Global solution the needs and goals of people sufficient room and the natural habitat that our body and mind needs A collaborative network Safety and Security Services with a sufficiently large population, with a large variety in ages, types of people and skills of a space colony extensively supported on many levels and its supporting swarm architecture Collision Prevention Services Holistic approach With multiple habitats, with for object impact defense, multi-layer architecture support from Earth mostly autonomous, consisting of Safe & robust support from celestial bodies: multiple types of telescopes Moon, Venus, Mars and Asteroids distributed information artificial gravity, radiation protection, atmosphere, water, food and light support in space: and knowledge processing robustness by default: safety, energy, flight vector adjustment services, compartmentalization, logistics, manufacturing by autonomous unit(s) distributed implementation, cloud overblow facility multilayer redundancy with fallback, With a space armada backup facilities & resources at Lagrangian points: Remote controlled repairs fleet impact and collision prevention clouds of space stations, Environment sustainability services with settlements, Mindset for humans, flora and fauna manufacturing, either safe or not, with regular internal and external evacuation drills air and water purification energy supply artificial gravity provisioning -
Ground Into Sky: the Topology of Interstellar
The Avery Review Fred scharmen – Ground into Sky: The Topology of Interstellar Christopher Nolan’s Interstellar was nominated for five Oscars. The Citation: Fred Scharmen, “Ground Into Sky: The Topology of Interstellar,” in The Avery Review, no. 6 movie won the Oscar for Best Visual Effects, many of which were created with (March 2015), http://averyreview.com/issues/6/ analog camera techniques. It has been controversial for its use of emotional ground-into-sky. themes, and its scientific accuracy. The physics in the film is either shockingly sloppy, or accurate enough to generate new peer-reviewed research, depend- ing on which review you read. [1] [2] But the best and most curious thing about [1] Phil Plait, “Interstellar Science: What the movie gets wrong and really wrong about black Interstellar is its topology. holes, relativity, plot, and dialogue,” Slate, http:// Again and again, in different ways, we see the ground lifting up to www.slate.com/articles/health_and_science/ space_20/2014/11/interstellar_science_review_ become the sky. The first appearance of this effect is early in the movie—the the_movie_s_black_holes_wormholes_relativity.html, horizon-obliterating dust storms that sweep across the American Midwest. accessed February 24, 2015. Cooper (the main character) and his family are at a baseball game when a dust [2]: Adam Rogers, “Wrinkles in Spacetime: The Warped Astrophysics of Interstellar,” Wired, http:// storm rises, looming like a growing mountain. Drought and blight have killed the www.wired.com/2014/10/astrophysics-interstellar- plant life that binds the soil, the near-future world of the movie has become a black-hole/, accessed February 24, 2015. -

TIDAL THEORY By: Paul O’Hargan
TIDAL THEORY By: Paul O’Hargan (1Tidaltheory.doc, revision – 12/14/2000) INTRODUCTION The word "tides" is a generic term used to define the alternating rise and fall in sea level with respect to the land, produced, in part, by the gravitational attraction of the moon and sun. There are additional nonastronomical factors influencing local heights and times of tides such as configuration of the coastline, depth of the water, ocean-floor topography, and other hydrographic and meteorological influences. Knowledge of these heights and times is important in practical applications such as navigation, harbor construction, tidal datums for hydrography and for mean high water line survey procedures, the determination of base lines for fixing offshore territorial limits and for tide predictions. ORIGIN OF ASTRONOMICAL TIDE RAISING FORCES At the surface of the earth, the earth's force of gravitational attraction acts in a direction toward its center, and thus holds the ocean waters confined to this surface. However, the gravitational forces of the moon and sun also act externally upon the earth's ocean waters. These external forces are exerted as tide producing forces, called tractive forces. To all outward appearances, the moon revolves around the earth, but in actuality, the moon and earth revolve together around their common center of mass called the barycenter. The two astronomical bodies are held together by gravitational attraction, but are simultaneously kept apart by an equal and opposite centrifugal force. At the earth's surface an imbalance between these two forces results in the fact that there exists, on the side of the earth turned toward the moon, a net tide producing force which acts in the direction of the moon. -

Solar System KEY.Pdf
Solar System 1. The diagram below represents a simple geocentric model. Which object is represented by the letter X? A) Earth B) Sun C) Moon D) Polaris 2. Which object orbits Earth in both the Earth-centered (geocentric) and Sun-centered (heliocentric) models of our solar system? A) the Moon B) the Sun C) Venus D) Polaris 3. In which type of model are the Sun, other stars, and the Moon in orbit around the Earth? A) heliocentric model B) tetrahedral model C) concentric model D) geocentric model 4. The diagram below shows one model of a portion of the universe. What type of model does the diagram best demonstrate? A) a heliocentric model, in which celestial objects orbit Earth B) a heliocentric model, in which celestial objects orbit the Sun C) a geocentric model, in which celestial objects orbit Earth D) a geocentric model, in which celestial objects orbit the Sun 5. Which diagram represents a geocentric model? [Key: E = Earth, P = Planet, S = Sun] A) B) C) D) 6. Which statement best describes the geocentric model of our solar system? A) The Earth is located at the center of the model. B) All planets revolve around the Sun. C) The Sun is located at the center of the model. D) All planets except the Earth revolve around the Sun. 7. Which apparent motion can be explained by a geocentric model? A) deflection of the wind B) curved path of projectiles C) motion of a Foucault pendulum D) the sun's path through the sky 8. In the geocentric model (the Earth at the center of the universe), which motion would occur? A) The Earth would revolve around the Sun. -

Lecture 1: Introduction to Ocean Tides
Lecture 1: Introduction to ocean tides Myrl Hendershott 1 Introduction The phenomenon of oceanic tides has been observed and studied by humanity for centuries. Success in localized tidal prediction and in the general understanding of tidal propagation in ocean basins led to the belief that this was a well understood phenomenon and no longer of interest for scientific investigation. However, recent decades have seen a renewal of interest for this subject by the scientific community. The goal is now to understand the dissipation of tidal energy in the ocean. Research done in the seventies suggested that rather than being mostly dissipated on continental shelves and shallow seas, tidal energy could excite far traveling internal waves in the ocean. Through interaction with oceanic currents, topographic features or with other waves, these could transfer energy to smaller scales and contribute to oceanic mixing. This has been suggested as a possible driving mechanism for the thermohaline circulation. This first lecture is introductory and its aim is to review the tidal generating mechanisms and to arrive at a mathematical expression for the tide generating potential. 2 Tide Generating Forces Tidal oscillations are the response of the ocean and the Earth to the gravitational pull of celestial bodies other than the Earth. Because of their movement relative to the Earth, this gravitational pull changes in time, and because of the finite size of the Earth, it also varies in space over its surface. Fortunately for local tidal prediction, the temporal response of the ocean is very linear, allowing tidal records to be interpreted as the superposition of periodic components with frequencies associated with the movements of the celestial bodies exerting the force.