PRISM: Passive Ramjet Inertial Stabilization Mechanism Final Technical Report MAE 4152W: Capstone Design Project 5 May 2019
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Project No.: R. 089145.001
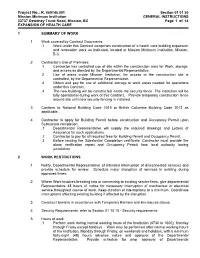
Project No.: R. 089145.001 Section 01 01 50 Mission Minimum Institution GENERAL INSTRUCTIONS 33737 Dewdney Trunk Road, Mission, BC Page 1 of 18 EXPANSION OF HEALTH CARE 1 SUMMARY OF WORK .1 Work covered by Contract Documents: .1 Work under this Contract comprises construction of a health care building expansion and renovation work as indicated, located at Mission Minimum Institution, Mission, B.C. .2 Contractor’s Use of Premises: .1 Contractor has controlled use of site within the construction area for Work, storage, and access as directed by the Departmental Representative. .2 Use of areas inside Mission Institution, for access to the construction site is controlled, by the Departmental Representative. .3 Obtain and pay for use of additional storage or work areas needed for operations under this Contract. .4 The new building will be constructed inside the security fence. The institution will be fully operational during work of this Contract. Provide temporary construction fence around site until new security fencing is installed. .3 Conform to National Building Code 2015 or British Columbia Building Code 2012 as applicable. .4 Contractor to apply for Building Permit before construction and Occupancy Permit upon Substantial completion. .1 Departmental Representative will supply the required drawings and Letters of Assurance for such applications. .2 Contractor to pay for all required fees for Building Permit and Occupancy Permit. .3 Before issuing the Substantial Completion certificate, Contractor must provide fire alarm verification report and Occupancy Permit from local authority having jurisdiction. 2 WORK RESTRICTIONS .1 Notify, Departmental Representative of intended interruption of disconnected services and provide schedule for review. -

19730021074.Pdf
NASA TECHNICAL NOTE NASA TN D-7328 CO LE CORY STEADY-STATE AND DYNAMIC PRESSURE PHENOMENA IN THE PROPULSION SYSTEM OF AN F-111A AIRPLANE by Frank W. Burcbam, Jr., Donald L. Hughes, and Jon K. Holzman Flight Research Center Edwards, Calif. 93523 NATIONAL AERONAUTICS AND SPACE ADMINISTRATION • WASHINGTON, D. C. • JULY 1973 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. NASA TN D-7328 4. Title and Subtitle 5. Report Date STEADY-STATE AND DYNAMIC PRESSURE PHENOMENA IN THE July 1973 PROPULSION SYSTEM OF AN F-111A AIRPLANE 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Frank W. Burcham, Jr., Donald L. Hughes, and Jon K. Holzman H-741 10. Work Unit No. 9. Performing Organization Name and Address 136-13-08-00-24 NASA Flight Research Center P. O. Box 273 11. Contract or Grant No. Edwards, California 93523 13. Type of Report and Period Covered 12. Sponsoring Agency Name and Address Technical Note National Aeronautics and Space Administration 14. Sponsoring Agency Code Washington, D. C. 20546 15. Supplementary Notes 16. Abstract Flight tests were conducted with two F-111A airplanes to study the effects of steady-state and dynamic pressure phenomena on the propulsion system. Analysis of over 100 engine compressor stalls revealed that the stalls were caused by high levels of instantaneous distortion. In 73 per- cent of these stalls, the instantaneous circumferential distortion parameter, Kg, exhibited a peak just prior to stall higher than any previous peak. The Kg parameter was a better indicator of stall than the distortion factor, K_, and the maximum-minus-minimum distortion parameter, D, was a poor indicator of stall. -

Your Continued Donations Keep Wikipedia Running
Jet engine performance Design Point TS Diagram Typical Temperature vs. Entropy (TS) Diagram for a single spool turbojet. Note that 1 CHU/(lbm K) = 1 Btu/(lb °R) = 1 Btu/(lb °F) = 1 kcal/(kg °C) = 4.184 kJ/(kg·K). Temperature vs. entropy (TS) diagrams (see example RHS) are usually used to illustrate the cycle of gas turbine engines. All the reader really needs to know about entropy is that it represents the degree of disorder of the molecules in the fluid and that it tends to increase! Apart from stations 0 and 8s, stagnation pressure and stagnation temperature are used. Station 0 is ambient. The processes depicted are: Freestream (stations 0 to 1) In the example, the aircraft is stationary, so stations 0 and 1 are coincident. Station 1 is not depicted on the diagram. Intake (stations 1 to 2) In the example, a 100% intake pressure recovery is assumed, so stations 1 and 2 are coincident. 1 Compression (stations 2 to 3) The ideal process would appear vertical on a TS diagram. In the real process there is friction, turbulence and, possibly, shock losses, making the exit temperature, for a given pressure ratio, higher than ideal. The shallower the positive slope on the TS diagram, the less efficient the compression process. Combustion (stations 3 to 4) Heat (usually by burning fuel) is added, raising the temperature of the fluid. There is an associated pressure loss, some of which is unavoidable Turbine (stations 4 to 5) The temperature rise in the compressor dictates that there will be an associated temperature drop across the turbine. -

RCAF Firebee Drone Set 1/72
Belcher Bits BL6: RCAF Firebee Drone set 1/72 Belcher Bits, 33 Norway Spruce St, Stittsville, ON, K2S 1P3 Phone: (613) 836-6575, e-mail: [email protected] Background The vertical fin has a pitot tube extending from its leading edge; this can best be represented with a length of wire or fine tubing. The RCAF took on strength a number of Ryan KDA-4 Firebee Glue the wings to the fuselage, making sure they are level. Glue the drones in 1958 in support of Sparrow II trials, proposed for use with the elevators where indicated. Note also that there is a definite gap on the CF-100 and to be developed for use with the CF-105 Arrow. These trials back half of each joint, so only fill the front half. Same thin applies for were conducted by the Central Experimental Proving Establishment. the vertical fin. Two Lancaster 10MR (KB848 and KB851)were modified as Drone Glue the tailplane endplates on the end of the tailplanes ... where Controllers to carry the Firebee drones. The aircraft were the most else! Finally, slide the engine inlet cone into the intake and retain with colourful Lancasters in the RCAF with extensive patches of dayglo on a couple drops of glue nose, tail and wingtips (although Sparrows cant see colours, the pilots . launching them can!) It was common to see these Lancaster 10DCs with Firebee Colours a full load of two Firebees underwing. All KDA-4 Firebees in RCAF service were red 9-2 (FS 11310). There were variations: some had white wings, and other photos show this First Steps white extended in a band across the top of the fuselage. -
SR-71 Blackbird Operations Manual
SR-71 Blackbird Operations Manual “I was extremely impressed by the level of detail in your display of 955 . Everything looks true to form. You obviously take great pride in getting things right and you've succeeded on the SR-71.” Richard H Graham, Col. USAF (Retired, SRSR----7171 Pilot, Squadron Commander and 9 ththth SRW Commander) Revision: 1.3-FS9 5th January, 2012. Glowingheat.co.uk - Lockheed SR-71 Operations Manual - 2012 Contents 2) Introduction & Brief History 7) SR-71 Walkaround 9) Glowingheat SR-71 Features 10) Glowingheat SR-71A/B Flight Procedures 12) Aircraft limitations & Main Panel, Right and left Panels 18) Annunciator Panel 19) Autopilot controls 20) Power Schedule 21) Engine Control Unit 23) RPM Indicators & Fuel Management Weight and Balance 25) Flight Characteristics 28) Engine Start & Take-off 29) Climb procedures 32) Cruising & Descent Procedures 33) Before Landing checks 35) Shutdown Procedure 36) Virtual Cockpit Gauges & Switches 42) The Tail numbers included & their individual history 44) Credits 45) Bibliography & Web links Page 1 Glowingheat.co.uk - Lockheed SR-71 Operations Manual - 2012 Introduction & Brief History The Birth of an aviation legend began in September 1959 when the DOD, CIA and USAF decided that Lockheed would build a U-2 follow on aircraft under the codename 'Oxcart'. The design team lead by Kelly Johnson designed and built the A-12 - a single seat Mach 3+ capable aircraft that was way ahead of its time. The aircraft coupled with the awesome power of twin Pratt & Whitney J-58 Continuous Bleed Afterburning Turbojets was like nothing seen before. Designed to operate in full afterburner for an hour at a time before descending to refuel, it's engines were extraordinary. -

Modelling and Simulation of the Revolutionary Turbine Accelerator
Announcement “This final year project was an exam. Commentary made during the presentation is not taken into account.” "Deze eindverhandeling was een examen. De tijdens de verdediging geformuleerde opmerkingen werden niet opgenomen". Preface Here I would like to thank everyone who made a contribution to my thesis. Also to all the people I forgot or do not call by name below. First of all I would like to thank my both VKI promoters. Guillermo Paniagua and Victor Fernández Villacé for their guidance, theoretical support and the help finding the exact information I was searching for. Also thanks to my KHBO promoter, Wim Vanparys who also gave me support, in addition to his clear view on the project and future considerations. Second I would like to say thank you to JeanFrançois Herbiet for his EcosimPro help, in which Victor also made his contribution, and for the information about the conical inlet and its implementation. Without the IT help of Olivier Jadot there would be no EcosimPro at the VKI, on my computer and it definitely would not be accessible at home. Also the people of the VKI library deserve a great thank you for delivering the requested papers as soon as possible which were essential to understand the working principle of the RTA. Next, a thank you to my VKI-colleagues, Piet Van den Ecker, Marylène Andre and Maarten De Moor for the great time and discussions about the occurring problems. Most of the time they helped me, without them knowing it, determining and resolving the problems. Of course to all the others as well, to keep up the spirit in the little room were we spent our time. -

Airshow News PUBLICATIONS
DAY 2 FARNBOROUGH July 17, 2018 Airshow News PUBLICATIONS ADVERTISEMENT MISSILE DEFENSE ADVERTISEMENT 18RTN2651_Raytheon_AIN Cover.indd 1 6/28/18 4:27 PM MISSILE DEFENSE CONNECTING VISION WITH PRECISION Across all tiers, enabling all missions, prepared for all threats — Raytheon Missile Defense solutions are ready now to defend warfi ghters and safeguard nations. Raytheon combines vision, precision and partnership to deliver for customers and drive success. PATRIOT TM SM-3® SM-6® NASAMSTM 3,200+ tests. 1,500 fl ight With nearly 30 space intercepts, Standard Missile-6 delivers A joint Raytheon-Kongsberg tests. 200+ combat uses by Standard Missile-3 is the a proven over-the-horizon product, the National fi ve partner nations. Patriot’s world’s only ballistic missile offensive and defensive Advanced Surface-to-Air combat-proven, cost-saving interceptor deployable from capability. It’s the only missile Missile System (NASAMS) is technology is used by 15 land or sea. Its versatility that supports anti-air warfare, a highly adaptable mid-range countries to drive international makes it invaluable to upper- anti-surface warfare and sea- solution for any operational air and missile defense. As tier missile defense for the based terminal ballistic missile air defense requirement. The threats evolve, so does Patriot, U.S. and its allies. When it is defense in one solution — tailorable, state-of-the-art with advanced capabilities land-based in Poland, SM-3 and it’s enabling the U.S. and defense system can quickly perfectly engineered for today’s will defend all of Europe its allies to cost-effectively identify, engage and destroy and tomorrow’s challenges. -

PFF-63 - Candidate Engine for a Hybrid Electric Medium Altitude Long Endurance Search and Rescue UAV
Team: Total Incredible Technical Solutions PFF-63 - Candidate Engine for a Hybrid Electric Medium Altitude Long Endurance Search and Rescue UAV AIAA Foundation Student Design Competition 2018/19 Undergraduate Team – Engine Signature page Design team: Karol Kozdrowicz [email protected] #904279 Maciej Spychała #921050 Damian Maciorowski #919069 Karolina Pazura #919607 Faculty Advisor: dr hab. inż. Ryszard Chachurski #920758 1 Abstract The following report details the design of PFF-63 turboshaft, as a replacement for the TPE331-10, candidate engine for a Hybrid Electric Medium Altitude Long Endurance Search and Rescue UAV. The PFF-63 incorporates modern engine architecture, advanced solutions and technologies including: 1. High efficiency architecture 2. Higher cycle pressure ratio 3. Successful usage of birotational compressor 4. Higher turbine inlet temperature 5. Usage of ceramic matrix composite 6. Elimination of nozzle stage in power turbine 7. No active cooling for turbine 8. Significant decrease of mass The primary requirements for this engine were to lower fuel burn, while provide decrease of weight and greater efficiency. Advanced, modern materials with great thermal properties are used to eliminate turbine cooling. Also usage of birotational compressor significantly increase efficiency of a cycle and lowers mass. The PFF-63 offers a 29 % lower SFC at loiter, an 42 % decrease in mass and increase of 313 °R temperature at the exit of combustion chamber. 2 Contents: Nomenclature………………………………………………………………………………………5 1. Introduction………………………………………………………………………………………...9 2. Cycle analysis……………………………………………………………………………………...10 2.1. Parametric design concept…………………………………………………………………10 2.1.1. Engine cycle constraints and assumptions…………………………………………………11 2.2. Engine concepts for PFF-63……………………………………………………………….12 2.3. -

An Experimental Investigation of the Flow Through the Aft Portion of a High-Flow Nacelle Bypass Concept
50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition AIAA 2012-0872 09 - 12 January 2012, Nashville, Tennessee An Experimental Investigation of the Flow Through the Aft Portion of a High-Flow Nacelle Bypass Concept Ruben Hortensius1, Gregory S. Elliott2, and Michael B. Bragg3 University of Illinois at Urbana-Champaign, Urbana, IL, 61801 In order to minimize sonic boom contribution, a conventional turbofan propulsion system was shape tailored to circularize its non-axisymmetric external profile, which, after the addition of a new supersonic inlet and nozzle, has led to a new supersonic propulsion system. A new, secondary, bypass with a highly complex internal geometry was created during this process. The high-flow nacelle bypass geometry includes a forward and aft fairing to direct the flow around the gearbox, a set of thin forward guide vanes, and a set of thick aft guide vanes. The aft guide vanes, which also serve structural purposes, are used to direct the flow such that the exhaust is a uniform, nearly-full annular cross-section, and to choke and then accelerate the flow to supersonic freestream conditions upon exit. A supersonic wind tunnel facility at the University of Illinois was modified and used to simulate the flow through the aft bypass at approximately 6% scale. Two models, one with and one without guide vanes, are studied. Due to facility limitations, the design operating condition could not be achieved; a series of off-design operating conditions are tested instead. Radial pressure surveys are conducted at five azimuthal stations at the inlet to the aft bypass in order to establish in-flow conditions. -

Superplastic Forming Applications on Aero Engines. a Review of Itp Manufacturing Processes D
SUPERPLASTIC FORMING APPLICATIONS ON AERO ENGINES. A REVIEW OF ITP MANUFACTURING PROCESSES D. Serra To cite this version: D. Serra. SUPERPLASTIC FORMING APPLICATIONS ON AERO ENGINES. A REVIEW OF ITP MANUFACTURING PROCESSES. EuroSPF08, Sep 2008, Carcassonne, France. hal-00359685 HAL Id: hal-00359685 https://hal.archives-ouvertes.fr/hal-00359685 Submitted on 9 Feb 2009 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. 6th EUROSPF Conference SUPERPLASTIC FORMING APPLICATIONS ON AERO ENGINES . A REVIEW OF ITP MANUFACTURING PROCESSES David SERRA ITP Industria de Turbo Propulsores, S.A. – Parque Tecnológico nº 300, 48170 ZAMUDIO (Vizcaya) - SPAIN [email protected] Abstract This paper reports a brief review of materials, manufacturing technologies and non destructive inspections of different superplastically formed parts for aero engines. Example of a manufacturing process of a SPF + DB part in ITP is presented. Keywords : Superplastic forming, aero engine, titanium, applications, inspection. 1 INTRODUCTION Since the early 1970’s, superplastic forming of titanium alloys became a feasible manufacturing technology for military aircraft in USA and also for the Concorde supersonic civil aircraft in Europe. In the next decade, new superplastic titanium and aluminium alloys were developed for different structural applications for military airframes and engines, but the first really implementation of SPF/DB was Boeing F15 Eagle, and Eurofighter afterwards. -

The Concept of a Full Scale Fatigue Test of a Su-22 Fighter Bomber
Fatigue of Aircraft Structures Vol. 1 (2014) 79-87 10.1515/fas-2014-0007 THE CONCEPT OF A FULL SCALE FATIGUE TEST OF A SU-22 FIGHTER BOMBER Piotr Reymer Andrzej Leski Wojciech Zieli ński Krzysztof Jankowski Air Force Institute of Technology, ul. Ksi ęcia Bolesława 6, 01-494 Warsaw, Poland [email protected] , [email protected] , [email protected] , [email protected] Abstract This article presents a concept of the full scale fatigue test of a Su-22 fighter bomber. The authors define the general concept and goals of the test as well as the tasks to be accomplished in the preparation stage. The current work status is summarized and future tasks are defined. Keywords: full scale fatigue test, Su-22 fighter bomber, life extension program INTRODUCTION Life extension program The Su-22 fighter-bomber is a military aircraft used in the Polish Air Force since the mid- 1980’s. According to the decision of the Polish Ministry of Defense the assumed service time for this type of aircraft will be prolonged. Due to the fact that a number of aircraft are nearing the end of the service life guaranteed by the manufacturer, the actual service life adequate to the flight profile in the Polish Air Force, has to be validated. Therefore, the Full Scale Fatigue Test has to be carried out. The service life of Su-22 fighter bombers is expressed by the cumulated number of flight hours and landings. Therefore, in order to extend service life it is crucial to define new numbers of flight hours and landings and then to validate them in order to assure safe operation within defined intervals. -

Ring Erur Ineering Aeronautical Engir
Aeronautical NASA SP-7037 (125) Engineering August 1980 A Continuing NASABibliography with Indexes National Aeronautics and Space Administration CPcopY Ae.Fl.,..,xflaLlhCal Enaineer!ngAei ring Erur ineering Aeronautical Engir :al Engineering Aeronautical I iautical EngineeringAeronau rl Engineering Mr bring Aeronautical Engineerin gineering Aeronautical Engimn al Engineering AeFut autr.al Engineering Ae Ui "X^M^utical Engineering Mn ring Aeronautical Engineerinc ACCESSION NUMBER RANGES Accession numbers cited in this Supplement fall within the following ranges. STAR (N-10000 Series) N80-22255 N80-24258 IAA (A-10000 Series) A80-32627 - A80-36306 This bibliography was prepared by the NASA Scientific and Technical Information Facility operated for the National Aeronautics and Space Administration by PRC Data Services Company. NASA SP-1037(125) AERONAUTICAL ENGINEERING A Continuing Bibliography Supplement 125 A selection of annotated references to unclas- sified reports and journal articles that were introduced into the NASA scientific and tech- nical information system and announced in July 1980 in • Scientific and Technical Aerospace Reports (STAR) • International Aerospace Abstracts (/AA). Scientific and Technical Information Branch 1980 NASA National Aeronautics and Space Administration Washington, DC This supplement is available as NTISUB/141/093 from the National Technical Information Service (NTIS). Springfield, Virginia 22161 at the price of $5.00 domestic: $10.00 foreign. INTRODUCTION Under the terms of an interagency agreement with the Federal Aviation Administration this publication has been prepared by the National Aeronautics and. Space Administration for the joint use of both agencies and the scientific and technical community concerned with the field of aeronautical engineering. The first issue of this bibliography was published in September 1970 and the first supplement in January 1971.