Chirikov.Thesis.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Hexaflexagons, Probability Paradoxes, and the Tower of Hanoi
HEXAFLEXAGONS, PROBABILITY PARADOXES, AND THE TOWER OF HANOI For 25 of his 90 years, Martin Gard- ner wrote “Mathematical Games and Recreations,” a monthly column for Scientific American magazine. These columns have inspired hundreds of thousands of readers to delve more deeply into the large world of math- ematics. He has also made signifi- cant contributions to magic, philos- ophy, debunking pseudoscience, and children’s literature. He has produced more than 60 books, including many best sellers, most of which are still in print. His Annotated Alice has sold more than a million copies. He continues to write a regular column for the Skeptical Inquirer magazine. (The photograph is of the author at the time of the first edition.) THE NEW MARTIN GARDNER MATHEMATICAL LIBRARY Editorial Board Donald J. Albers, Menlo College Gerald L. Alexanderson, Santa Clara University John H. Conway, F.R. S., Princeton University Richard K. Guy, University of Calgary Harold R. Jacobs Donald E. Knuth, Stanford University Peter L. Renz From 1957 through 1986 Martin Gardner wrote the “Mathematical Games” columns for Scientific American that are the basis for these books. Scientific American editor Dennis Flanagan noted that this column contributed substantially to the success of the magazine. The exchanges between Martin Gardner and his readers gave life to these columns and books. These exchanges have continued and the impact of the columns and books has grown. These new editions give Martin Gardner the chance to bring readers up to date on newer twists on old puzzles and games, on new explanations and proofs, and on links to recent developments and discoveries. -

Embedded System Security: Prevention Against Physical Access Threats Using Pufs
International Journal of Innovative Research in Science, Engineering and Technology (IJIRSET) | e-ISSN: 2319-8753, p-ISSN: 2320-6710| www.ijirset.com | Impact Factor: 7.512| || Volume 9, Issue 8, August 2020 || Embedded System Security: Prevention Against Physical Access Threats Using PUFs 1 2 3 4 AP Deepak , A Krishna Murthy , Ansari Mohammad Abdul Umair , Krathi Todalbagi , Dr.Supriya VG5 B.E. Students, Department of Electronics and Communication Engineering, Sir M. Visvesvaraya Institute of Technology, Bengaluru, India1,2,3,4 Professor, Department of Electronics and Communication Engineering, Sir M. Visvesvaraya Institute of Technology, Bengaluru, India5 ABSTRACT: Embedded systems are the driving force in the development of technology and innovation. It is used in plethora of fields ranging from healthcare to industrial sectors. As more and more devices come into picture, security becomes an important issue for critical application with sensitive data being used. In this paper we discuss about various vulnerabilities and threats identified in embedded system. Major part of this paper pertains to physical attacks carried out where the attacker has physical access to the device. A Physical Unclonable Function (PUF) is an integrated circuit that is elementary to any hardware security due to its complexity and unpredictability. This paper presents a new low-cost CMOS image sensor and nano PUF based on PUF targeting security and privacy. PUFs holds the future to safer and reliable method of deploying embedded systems in the coming years. KEYWORDS:Physically Unclonable Function (PUF), Challenge Response Pair (CRP), Linear Feedback Shift Register (LFSR), CMOS Image Sensor, Polyomino Partition Strategy, Memristor. I. INTRODUCTION The need for security is universal and has become a major concern in about 1976, when the first initial public key primitives and protocols were established. -

Some Open Problems in Polyomino Tilings
Some Open Problems in Polyomino Tilings Andrew Winslow1 University of Texas Rio Grande Valley, Edinburg, TX, USA [email protected] Abstract. The author surveys 15 open problems regarding the algorith- mic, structural, and existential properties of polyomino tilings. 1 Introduction In this work, we consider a variety of open problems related to polyomino tilings. For further reference on polyominoes and tilings, the original book on the topic by Golomb [15] (on polyominoes) and more recent book of Gr¨unbaum and Shep- hard [23] (on tilings) are essential. Also see [2,26] and [19,21] for open problems in polyominoes and tiling more broadly, respectively. We begin by introducing the definitions used throughout; other definitions are introduced as necessary in later sections. Definitions. A polyomino is a subset of R2 formed by a strongly connected union of axis-aligned unit squares centered at locations on the square lattice Z2. Let T = fT1;T2;::: g be an infinite set of finite simply connected closed sets of R2. Provided the elements of T have pairwise disjoint interiors and cover the Euclidean plane, then T is a tiling and the elements of T are called tiles. Provided every Ti 2 T is congruent to a common shape T , then T is mono- hedral, T is the prototile of T , and the elements of T are called copies of T . In this case, T is said to have a tiling. 2 Isohedral Tilings We begin with monohedral tilings of the plane where the prototile is a polyomino. If a tiling T has the property that for all Ti;Tj 2 T , there exists a symmetry of T mapping Ti to Tj, then T is isohedral; otherwise the tiling is non-isohedral (see Figure 1). -
Shapes Puzzle 1
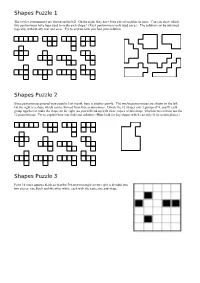
Shapes Puzzle 1 The twelve pentominoes are shown on the left. On the right, they have been placed together in pairs. Can you show which two pentominoes have been used to make each shape? (Each pentomino is only used once.) The solution can be obtained logically, without any trial and error. Try to explain how you find your solution. Shapes Puzzle 2 Since pentominoes proved very popular last month, here is another puzzle. The twelve pentominoes are shown on the left. On the right is a shape which can be formed from four pentominoes. Divide the 12 shapes into 3 groups of 4, and fit each group together to make the shape on the right (so you will end up with three copies of this shape, which between them use the 12 pentominoes. Try to explain how you find your solution. (Hint: look for key shapes which can only fit in certain places.) Shapes Puzzle 3 Paint 10 more squares black so that the 5x6 unit rectangle on the right is divided into two pieces: one black and the other white, each with the same size and shape. Shapes Puzzle 4 I have a piece of carpet 10m square. I want to use it to carpet my lounge, which is 12m by 9m, but has a fixed aquarium 1m by 8m in the centre, as shown. Show how I can cut the carpet into just two pieces which I can then use to carpet the room exactly. [Hint: The cut is entirely along the 1m gridlines shown.] Shapes Puzzle 5 Can you draw a continuous line which passes through every square in the grid on the right, except the squares which are shaded in? (The grid on the left has been done for you as an example.) Try to explain the main steps towards your solution, even if you can't explain every detail. -

By Kate Jones, RFSPE
ACES: Articles, Columns, & Essays A Periodic Table of Polyform Puzzles by Kate Jones, RFSPE What are polyform puzzles? A branch of mathematics known as Combinatorics deals with systems that encompass permutations and combinations. A subcategory covers tilings, or tessellations, that are formed of mosaic-like pieces of all different shapes made of the same distinct building block. A simple example is starting with a single square as the building block. Two squares joined are a domino. Three squares joined are a tromino. Compare that to one proton/electron pair forming hydrogen, and two of them becoming helium, etc. The puzzles consist of combining all the members of a set into coherent shapes, in as many different variations as possible. Here is a table of geometric families of polyform sets that provide combinatorial puzzle challenges (“recreational mathematics”) developed and produced by my company, Kadon Enterprises, Inc., over the last 40 years (1979-2019). See www.gamepuzzles.com. The POLYOMINO Series Figure 1: The polyominoes orders 1 through 5. 36 TELICOM 31, No. 3 — Third Quarter 2019 Figure 2: Polyominoes orders 1-5 (Poly-5); order 6 (hexominoes, Sextillions); order 7 (heptominoes); and order 8 (octominoes)—21, 35, 108 and 369 pieces, respectively. Polyominoes named by Solomon Golomb in 1953. Product names by Kate Jones. TELICOM 31, No. 3 — Third Quarter 2019 37 Figure 3: Left—Polycubes orders 1 through 4. Right—Polycubes order 5 (the planar pentacubes, Kadon’s Quintillions set). Figure 4: Above—the 18 non-planar pentacubes (Super Quintillions). Below—the 166 hexacubes. 38 TELICOM 31, No. 3 — Third Quarter 2019 The POLYIAMOND Series Figure 5: The polyiamonds orders 1 through 7. -

Tiling with Polyominoes, Polycubes, and Rectangles
University of Central Florida STARS Electronic Theses and Dissertations, 2004-2019 2015 Tiling with Polyominoes, Polycubes, and Rectangles Michael Saxton University of Central Florida Part of the Mathematics Commons Find similar works at: https://stars.library.ucf.edu/etd University of Central Florida Libraries http://library.ucf.edu This Masters Thesis (Open Access) is brought to you for free and open access by STARS. It has been accepted for inclusion in Electronic Theses and Dissertations, 2004-2019 by an authorized administrator of STARS. For more information, please contact [email protected]. STARS Citation Saxton, Michael, "Tiling with Polyominoes, Polycubes, and Rectangles" (2015). Electronic Theses and Dissertations, 2004-2019. 1438. https://stars.library.ucf.edu/etd/1438 TILING WITH POLYOMINOES, POLYCUBES, AND RECTANGLES by Michael A. Saxton Jr. B.S. University of Central Florida, 2013 A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in the Department of Mathematics in the College of Sciences at the University of Central Florida Orlando, Florida Fall Term 2015 Major Professor: Michael Reid ABSTRACT In this paper we study the hierarchical structure of the 2-d polyominoes. We introduce a new infinite family of polyominoes which we prove tiles a strip. We discuss applications of algebra to tiling. We discuss the algorithmic decidability of tiling the infinite plane Z × Z given a finite set of polyominoes. We will then discuss tiling with rectangles. We will then get some new, and some analogous results concerning the possible hierarchical structure for the 3-d polycubes. ii ACKNOWLEDGMENTS I would like to express my deepest gratitude to my advisor, Professor Michael Reid, who spent countless hours mentoring me over my time at the University of Central Florida. -

Packing a Rectangle with Congruent N-Ominoes
JOURNAL OF COMBINATORIAL THEORY 7, 107--115 (1969) Packing a Rectangle with Congruent N-ominoes DAVID A. KLARNER McMas'ter University, Hamilton, Ontario, Canada Communicated b)' Gian-Carlo Rota Received April 1968 ABSTRACT Golomb defines a polyomino (a generalized domino) to be a finite set of rook-wise connected cells in an infinite chessboard. In this note we discuss problems concerning the packing of rectangles with congruent polyominoes. Many of these problems are unsolved. The square lattice consists of lattice points, edges, and cells. A lattice point is a point with integer coordinates in the Cartesian plane, edge is a unit line segment that connects two lattice points, and a cell is a point set consisting of the boundary and interior points of a unit square having its vertices at lattice points. An n-omino is a union of n cells that is connected and has no finite cut set. An n-omino X packs an a ?z b rectangle R if R can be expressed as the union of n-ominoes X1, X 2 ,... such that Xi is congruent to X(i = 1,2,...) and 3Li, X~ (i 5./) have no common interior points. If X packs a rectangle with area kn, we say k is a packing number.for X and write P(X) for the set of all packing numbers for X. If X does not pack a rectangle we write P(X) == 0; also, if k ~ P(X), jk c P(X) (j = 1,2,...), so that P(X) 7~ f) implies P(X) is infinite. -

Martin Gardner Papers SC0647
http://oac.cdlib.org/findaid/ark:/13030/kt6s20356s No online items Guide to the Martin Gardner Papers SC0647 Daniel Hartwig & Jenny Johnson Department of Special Collections and University Archives October 2008 Green Library 557 Escondido Mall Stanford 94305-6064 [email protected] URL: http://library.stanford.edu/spc Note This encoded finding aid is compliant with Stanford EAD Best Practice Guidelines, Version 1.0. Guide to the Martin Gardner SC064712473 1 Papers SC0647 Language of Material: English Contributing Institution: Department of Special Collections and University Archives Title: Martin Gardner papers Creator: Gardner, Martin Identifier/Call Number: SC0647 Identifier/Call Number: 12473 Physical Description: 63.5 Linear Feet Date (inclusive): 1957-1997 Abstract: These papers pertain to his interest in mathematics and consist of files relating to his SCIENTIFIC AMERICAN mathematical games column (1957-1986) and subject files on recreational mathematics. Papers include correspondence, notes, clippings, and articles, with some examples of puzzle toys. Correspondents include Dmitri A. Borgmann, John H. Conway, H. S. M Coxeter, Persi Diaconis, Solomon W Golomb, Richard K.Guy, David A. Klarner, Donald Ervin Knuth, Harry Lindgren, Doris Schattschneider, Jerry Slocum, Charles W.Trigg, Stanislaw M. Ulam, and Samuel Yates. Immediate Source of Acquisition note Gift of Martin Gardner, 2002. Information about Access This collection is open for research. Ownership & Copyright All requests to reproduce, publish, quote from, or otherwise use collection materials must be submitted in writing to the Head of Special Collections and University Archives, Stanford University Libraries, Stanford, California 94304-6064. Consent is given on behalf of Special Collections as the owner of the physical items and is not intended to include or imply permission from the copyright owner. -
Intendd for Both
A DOCUMENT RESUME ED 040 874 SE 008 968 AUTHOR Schaaf, WilliamL. TITLE A Bibli6graphy of RecreationalMathematics, Volume INSTITUTION National Council 2. of Teachers ofMathematics, Inc., Washington, D.C. PUB DATE 70 NOTE 20ap. AVAILABLE FROM National Council of Teachers ofMathematics:, 1201 16th St., N.W., Washington, D.C.20036 ($4.00) EDRS PRICE EDRS Price ME-$1.00 HC Not DESCRIPTORS Available fromEDRS. *Annotated Bibliographies,*Literature Guides, Literature Reviews,*Mathematical Enrichment, *Mathematics Education,Reference Books ABSTRACT This book isa partially annotated books, articles bibliography of and periodicalsconcerned with puzzles, tricks, mathematicalgames, amusements, andparadoxes. Volume2 follows original monographwhich has an gone through threeeditions. Thepresent volume not onlybrings theliterature up to material which date but alsoincludes was omitted in Volume1. The book is the professionaland amateur intendd forboth mathematician. Thisguide canserve as a place to lookfor sourcematerials and will engaged in research. be helpful tostudents Many non-technicalreferences the laymaninterested in are included for mathematicsas a hobby. Oneuseful improvementover Volume 1 is that the number ofsubheadings has more than doubled. (FL) been 113, DEPARTMENT 01 KWH.EDUCATION & WELFARE OffICE 01 EDUCATION N- IN'S DOCUMENT HAS BEEN REPRODUCED EXACILY AS RECEIVEDFROM THE CO PERSON OR ORGANIZATION ORIGINATING IT POINTS Of VIEW OR OPINIONS STATED DO NOT NECESSARILY CD REPRESENT OFFICIAL OFFICE OfEDUCATION INt POSITION OR POLICY. C, C) W A BIBLIOGRAPHY OF recreational mathematics volume 2 Vicature- ligifitt.t. confiling of RECREATIONS F DIVERS KIND S7 VIZ. Numerical, 1Afironomical,I f Antomatical, GeometricallHorometrical, Mechanical,i1Cryptographical, i and Statical, Magnetical, [Htlorical. Publifhed to RecreateIngenious Spirits;andto induce them to make fartherlcruciny into tilde( and the like) Suut.tm2. -

How to Prove It
Similarly, by joining four unit squares edge-to-edge, the shapes shown in Figure 3 are possible. They are called tetrominoes. The names given to the individual shapes are shown alongside. How To Prove It Straight L T Z Square Figure 3. The five tetrominoes In a previous issue of AtRiA (as part of the For n = 5, the shapes are called pentominoes. It turns out that there are 12 possible pentominoes. We “Low Floor High Ceiling” series), questions invite you to list them. For n = 6, the shapes are called hexominoes. As you may guess, there are a large ClassRoom had been posed and studied about polyominoes. number of these figures. In this article, we consider and prove two In general, we may define a polyomino as “a plane geometric figure formed by joining one or moreequal specific results concerning these objects, and squares edge-to-edge.” (This is the definition given in [3]. See also [4]. For more about polyominoes, you make a few remarks about an open problem. may refer to the highly readable accounts in [1] and [2].) As we increase the number of unit squares, more complex shapes become possible. For example, we may get shapes with ‘holes’ such as the one shown in Figure 4. Shailesh A Shirali Polyomino as a natural generalisation of a domino We are familiar with the notion of a domino, which is a shape produced by joining two unit squares edge-to-edge. If we divide this object into two equal parts, we get a monomino. See Figure 1. -

Aerospace Micro-Lesson
AIAA AEROSPACE M ICRO-LESSON Easily digestible Aerospace Principles revealed for K-12 Students and Educators. These lessons will be sent on a bi-weekly basis and allow grade-level focused learning. - AIAA STEM K-12 Committee. POLYOMINOES Most people have played a game of dominoes at some point in their lives. You can trust mathematicians to take an everyday concept and extend it in directions that most people have not thought about. This lesson explores a couple of the extensions of the concept of a domino. Next Generation Science Standards (NGSS): * Discipline: Engineering, technology, and applications of science. * Crosscutting Concept: Patterns. * Science & Engineering Practice: Constructing explanations and designing solutions. Common Core State Standards (CCSS): Math: Geometry. * Standard for Mathematical Practice: Make sense of problems and persevere in solving them. GRADES K-2 CCSS: Geometry: Partition a rectangle into rows and columns of same-size squares and count to find the total number of them. A domino is made of two squares attached along one of their sides. What happens if you attach a third square? You get a tromino (also called a “triomino,” but that term can be confused with the game of that name that involves triangles). If you attach a fourth square, you get a tetromino and a fifth square gives you a pentomino. There is only one kind of domino: it is two squares attached to each other. There are two kinds of tromino, though: you can attach the third square to the short end of the domino or on the long side of the domino. -
Section 4: Polyominoes
GL361_04.qx 10/21/09 4:43 PM Page 51 4Polyominoes olyominoes are a major topic in recreational mathematics and in the field of geometric combinatorics. Mathematician PSolomon W.Golomb named and first studied them in 1953. He published a book about them in 1965, with a revised edition in 1994 (Polyominoes: Puzzles, Patterns, Problems, and Packings). Martin Gardner’s “Mathematical Games” column in Scientific American popularized many polyomino puzzles and problems. Since then, polyominoes have become one of the most popular branches of recreational mathematics. Mathematicians have created and solved hundreds of polyomino problems and have proved others to be unsolvable. Computer programmers have used computers to solve some of the tougher puzzles. Polyominoes have connections with various themes in geometry— symmetry, tiling, perimeter, and area—that we will return to in future sections.The only part of this section that is required in order to pursue those connections is the introductory lab, Lab 4.1 (Finding the Polyominoes).The remaining labs are not directly related to topics in Geometry Labs Section 4 Polyominoes 51 © 1999 Henri Picciotto, www.MathEducationPage.org GL361_04.qx 10/21/09 4:43 PM Page 52 the traditional curriculum, but they help develop students’ visual sense and mathematical habits of mind, particularly regarding such skills as: • systematic searching; • classification; and • construction of a convincing argument. These habits are the main payoff of these labs, as specific information about polyominoes is not important to students’ further studies. Use this section as a resource for students to do individual or group projects, or just as an interesting area for mathematical thinking if your students are enthusiastic about polyominoes.