Development and Testing of Metop-Sg Solar Array Drive Mechaism
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Metop Second Generation Payload
MetOp Second Generation Payload Marc Loiselet, Ville Kangas, Ilias Manolis, Franco Fois, Salvatore d’Addio European Space Agency, ESA/ESTEC, Keplerlaan 1, 2200 AG Noordwijk, The Netherlands E-mail: [email protected] MetOp-Second Generation Satellite Instruments Instrument Provider The ESA MetOp Second Generation (MetOp-SG) Programme was approved at the ESA Council Meeting at Ministerial level in Naples in Sat-A METimage DLR via EUMETSAT November 2012. IASI-NG CNES via EUMETSAT MetOp-SG is a follow-on to the current, first generation series of MetOp satellites, which is now established as a cornerstone of the global MWS ESA – MetOp-SG network of meteorological satellites. RO ESA – MetOp-SG The MetOp-SG programme is being implemented in collaboration with EUMETSAT. 3MI ESA – MetOp-SG ESA will develop the prototype MetOp-SG satellites (including associated instruments) and procure, on behalf of EUMETSAT, the recurrent Sentinel-5 ESA – GMES satellites (and associated instruments). The overall MetOp-SG space segment architecture consists of two series of satellites (Sat-A, Sat-B), each carrying different suites of instruments and operating in LEO polar orbit. The planned launches of the first of each series of satellites Sat-B SCA ESA – MetOp-SG are at the beginning of 2021 and at end 2022, respectively. MWI ESA – MetOp-SG RO ESA – MetOp-SG More information can be found in the “MetOp Second Generation – Overview” presentation from Graeme Mason, Hubert Barré, Maurizio ICI ESA – MetOp-SG Betto, ESA-ESTEC, The Netherlands. Argos-4 CNES via EUMETSAT Payload ESA is responsible for instrument design of six instruments, namely the MicroWave Sounder (MWS), Scatterometer (SCA), the Radio Occultation (RO), the MicroWave Imaging (MWI), the Ice Cloud Imager (ICI), and the Multi-viewing, Multi-channel, Multi-polarisation imager (3MI). -

→ Space for Europe European Space Agency
number 149 | February 2012 bulletin → space for europe European Space Agency The European Space Agency was formed out of, and took over the rights and The ESA headquarters are in Paris. obligations of, the two earlier European space organisations – the European Space Research Organisation (ESRO) and the European Launcher Development The major establishments of ESA are: Organisation (ELDO). The Member States are Austria, Belgium, Czech Republic, Denmark, Finland, France, Germany, Greece, Ireland, Italy, Luxembourg, the ESTEC, Noordwijk, Netherlands. Netherlands, Norway, Portugal, Romania, Spain, Sweden, Switzerland and the United Kingdom. Canada is a Cooperating State. ESOC, Darmstadt, Germany. In the words of its Convention: the purpose of the Agency shall be to provide for ESRIN, Frascati, Italy. and to promote, for exclusively peaceful purposes, cooperation among European States in space research and technology and their space applications, with a view ESAC, Madrid, Spain. to their being used for scientific purposes and for operational space applications systems: Chairman of the Council: D. Williams → by elaborating and implementing a long-term European space policy, by Director General: J.-J. Dordain recommending space objectives to the Member States, and by concerting the policies of the Member States with respect to other national and international organisations and institutions; → by elaborating and implementing activities and programmes in the space field; → by coordinating the European space programme and national programmes, and by integrating the latter progressively and as completely as possible into the European space programme, in particular as regards the development of applications satellites; → by elaborating and implementing the industrial policy appropriate to its programme and by recommending a coherent industrial policy to the Member States. -

Esa Broch Envisat 2.Xpr Ir 36
ENVISAT-1 Mission & System Summary ENVISAT-1 ENVISAT-1 Mission & System Summary Issue 2 Table of contents Table Table of contents 1 Introduction 3 Mission 4 System 8 Satellite 16 Payload Instruments 26 Products & Simulations 62 FOS 66 PDS 68 Overall Development and Verification Programme 74 Industrial Organization 78 Introduction Introduction 3 The impacts of mankind’s activities on the Earth’s environment is one of the major challenges facing the The -1 mission constists of three main elements: human race at the start of the third millennium. • the Polar Platform (); • the -1 Payload; The ecological consequences of human activities is of • the -1 Ground Segment. major concern, affecting all parts of the globe. Within less than a century, induced climate changes The development was initiated in 1989 as may be bigger than what those faced by humanity over a multimission platform; the -1 payload the last 10000 years. The ‘greenhouse effect’, acid rain, complement was approved in 1992 with the final the hole in the ozone layer, the systematic destruction decision concerning the industrial consortium being of forests are all triggering passionate debates. taken in March 1994. The -1 Ground Concept was approved in September 1994. This new awareness of the environmental and climatic changes that may be affecting our entire planet has These decisions resulted in three parallel industrial considerably increased scientific and political awareness developments, together producing the overall -1 of the need to analyse and understand the complex system. interactions between the Earth’s atmosphere, oceans, polar and land surfaces. The development, integration and test of the various elements are proceeding leading to a launch of the The perspective being able to make global observations -1 satellite planned for the end of this decade. -

The EUMETSAT Polar System 13+ Successful Years of Global Observations for Operational Weather Prediction and Climate Monitoring K
Article The EUMETSAT Polar System 13+ Successful Years of Global Observations for Operational Weather Prediction and Climate Monitoring K. Dieter Klaes, Jörg Ackermann, Craig Anderson, Yago Andres, Thomas August, Régis Borde, Bojan Bojkov, Leonid Butenko, Alessandra Cacciari, Dorothée Coppens, Marc Crapeau, Stephanie Guedj, Olivier Hautecoeur, Tim Hultberg, Rüdiger Lang, Stefanie Linow, Christian Marquardt, Rosemarie Munro, Carlo Pettirossi, Gabriele Poli, Francesca Ticconi, Olivier Vandermarcq, Mayte Vasquez, and Margarita Vazquez-Navarro ABSTRACT: After successful launch in November 2018 and successful commissioning of Metop-C, all three satellites of the EUMETSAT Polar System (EPS) are in orbit together and operational. EPS is part of the Initial Joint Polar System (IJPS) with the United States (NOAA) and provides the service in the midmorning orbit. The Metop satellites carry a mission payload of sounding and imaging instruments, which allow provision of support to operational meteorology and climate monitoring, which are the main mission objectives for EPS. Applications include numerical weather prediction, atmospheric composition monitoring, and marine meteorology. Climate monitoring is supported through the generation of long time series through the program duration of 20+ years. The payload was developed and contributed by partners, including NOAA, CNES, and ESA. EUMETSAT and ESA developed the space segment in cooperation. The system has proven its value since the first satellite Metop-A, with enhanced products at high reliability -

Synthetic Aperture Radar in Europe: ERS, Envisat, and Beyond
SYNTHETIC APERTURE RADAR IN EUROPE Synthetic Aperture Radar in Europe: ERS, Envisat, and Beyond Evert Attema, Yves-Louis Desnos, and Guy Duchossois Following the successful Seasat project in 1978, the European Space Agency used advanced microwave radar techniques on the European Remote Sensing satellites ERS-1 (1991) and ERS-2 (1995) to provide global and repetitive observations, irrespective of cloud or sunlight conditions, for the scientific study of the Earth’s environment. The ERS synthetic aperture radars (SARs) demonstrated for the first time the feasibility of a highly stable SAR instrument in orbit and the significance of a long-term, reliable mission. The ERS program has created opportunities for scientific discovery, has revolutionized many Earth science disciplines, and has initiated commercial applica- tions. Another European SAR, the Advanced SAR (ASAR), is expected to be launched on Envisat in late 2000, thus ensuring the continuation of SAR data provision in C band but with important new capabilities. To maximize the use of the data, a new data policy for ERS and Envisat has been adopted. In addition, a new Earth observation program, The Living Planet, will follow Envisat, offering opportunities for SAR science and applications well into the future. (Keywords: European Remote Sensing satellite, Living Planet, Synthetic aperture radar.) INTRODUCTION In Europe, synthetic aperture radar (SAR) technol- Earth Watch component of the new Earth observation ogy for polar-orbiting satellites has been developed in program, The Living Planet, and possibly the scientific the framework of the Earth observation programs of Earth Explorer component will include future SAR the European Space Agency (ESA). -

Civilian Satellite Remote Sensing: a Strategic Approach
Civilian Satellite Remote Sensing: A Strategic Approach September 1994 OTA-ISS-607 NTIS order #PB95-109633 GPO stock #052-003-01395-9 Recommended citation: U.S. Congress, Office of Technology Assessment, Civilian Satellite Remote Sensing: A Strategic Approach, OTA-ISS-607 (Washington, DC: U.S. Government Printing Office, September 1994). For sale by the U.S. Government Printing Office Superintendent of Documents, Mail Stop: SSOP. Washington, DC 20402-9328 ISBN 0-16 -045310-0 Foreword ver the next two decades, Earth observations from space prom- ise to become increasingly important for predicting the weather, studying global change, and managing global resources. How the U.S. government responds to the political, economic, and technical0 challenges posed by the growing interest in satellite remote sensing could have a major impact on the use and management of global resources. The United States and other countries now collect Earth data by means of several civilian remote sensing systems. These data assist fed- eral and state agencies in carrying out their legislatively mandated pro- grams and offer numerous additional benefits to commerce, science, and the public welfare. Existing U.S. and foreign satellite remote sensing programs often have overlapping requirements and redundant instru- ments and spacecraft. This report, the final one of the Office of Technolo- gy Assessment analysis of Earth Observations Systems, analyzes the case for developing a long-term, comprehensive strategic plan for civil- ian satellite remote sensing, and explores the elements of such a plan, if it were adopted. The report also enumerates many of the congressional de- cisions needed to ensure that future data needs will be satisfied. -

Simulation of the Yield and Accuracy of Wind Profile Measurements From
431 Simulation of the yield and accuracy of wind profile measurements from the Atmospheric Dynamics Mission (ADM-Aeolus). David G.H. Tan and Erik Andersson Research Department Submitted to Q. J. R. Meteorol. Soc. January 2004 Series: ECMWF Technical Memoranda A full list of ECMWF Publications can be found on our web site under: http://www.ecmwf.int/publications/ Contact: [email protected] c Copyright 2004 European Centre for Medium Range Weather Forecasts Shinfield Park, Reading, RG2 9AX, England Literary and scientific copyrights belong to ECMWF and are reserved in all countries. This publication is not to be reprinted or translated in whole or in part without the written permission of the Director. Appropriate non-commercial use will normally be granted under the condition that reference is made to ECMWF. The information within this publication is given in good faith and considered to be true, but ECMWF accepts no liability for error, omission and for loss or damage arising from its use. Yield and accuracy of ADM-Aeolus wind measurements Abstract The European Space Agency’s ADM-Aeolus mission will for the first time provide wind profile measure- ments from space. In this study we carry out global simulations to predict the yield and accuracy of future ADM-Aeolus wind profile measurements, using realistic clouds and climatological aerosol distributions. Based on an assessment of wind analysis accuracy we argue that the main Aeolus impacts are to be expected (1) in the jet streams over the oceans, especially away from main air traffic routes, and in the African/Asian subtropical jet; (2) in the lower troposphere, e.g. -

The European Space Agency
THE EUROPEAN SPACE AGENCY UNITED SPACE IN EUROPE ESA facts and figures . Over 50 years of experience . 22 Member States . Eight sites/facilities in Europe, about 2300 staff . 5.75 billion Euro budget (2017) . Over 80 satellites designed, tested and operated in flight Slide 2 Purpose of ESA “To provide for and promote, for exclusively peaceful purposes, cooperation among European states in space research and technology and their space applications.” Article 2 of ESA Convention Slide 3 Member States ESA has 22 Member States: 20 states of the EU (AT, BE, CZ, DE, DK, EE, ES, FI, FR, IT, GR, HU, IE, LU, NL, PT, PL, RO, SE, UK) plus Norway and Switzerland. Seven other EU states have Cooperation Agreements with ESA: Bulgaria, Cyprus, Latvia, Lithuania, Malta and Slovakia. Discussions are ongoing with Croatia. Slovenia is an Associate Member. Canada takes part in some programmes under a long-standing Cooperation Agreement. Slide 4 Activities space science human spaceflight exploration ESA is one of the few space agencies in the world to combine responsibility in nearly all areas of space activity. earth observation launchers navigation * Space science is a Mandatory programme, all Member States contribute to it according to GNP. All other programmes are Optional, funded ‘a la carte’ by Participating States. operations technology telecommunications Slide 5 ESA’s locations Salmijaervi (Kiruna) Moscow Brussels ESTEC (Noordwijk) ECSAT (Harwell) EAC (Cologne) Washington Houston Maspalomas ESA HQ (Paris) ESOC (Darmstadt) Oberpfaffenhofen Santa Maria -

Maria Cristina Falvella Strategic Perspectives and European Affairs Italian Space Agency
Space activities in Italy: - National strategies and way forward Maria Cristina Falvella Strategic perspectives and European affairs Italian Space Agency Workshop on European Space Governance - Madrid , March 23° 2015 A long tradition in space activities o’40: The Italian Space Community began to organize itself o ‘50: Edoardo Amaldi and Luigi Broglio started the first aerospace projects o 1964: first Italian satellite into orbit from Wallops Island (USA) o 1966: the first Italian satellite launched from Italian equatorial Malindi Base (Kenya) Italian Space Agency : National History o 1963 - National Institute for Space Researches (IRS): the first formal space coordination activities o 1979 - first National Space Plan o 1988 - Institution of the Italian Space Agency (ASI) Italian Space Agency International History • Italy is a founding Member State of the UN-COPUOS 1959: Prof. Edoardo Amaldi proposes the institution of an European body for civil space research 1964: Italy is a founding Member State of • ELDO, European Launcher Development Organization • ESRO, European Space Research Organization 1975: Italy is a founding Member State of the European Space Agency (ESA) Italian Space Agency www.asi.it ASI is a public Agency, monitored by the Italian Ministry of Education, University and Research ASI Mission ■ Elaboration of national space strategies through the drafting of the National Space Plan ■ Promotion and financing of Scientific and Technological Space Research ■ Support of Space Education and Training of students and young professionals -
10. Spacecraft Configurations MAE 342 2016
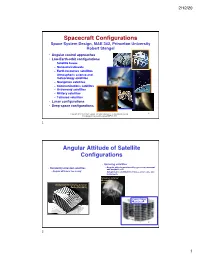
2/12/20 Spacecraft Configurations Space System Design, MAE 342, Princeton University Robert Stengel • Angular control approaches • Low-Earth-orbit configurations – Satellite buses – Nanosats/cubesats – Earth resources satellites – Atmospheric science and meteorology satellites – Navigation satellites – Communications satellites – Astronomy satellites – Military satellites – Tethered satellites • Lunar configurations • Deep-space configurations Copyright 2016 by Robert Stengel. All rights reserved. For educational use only. 1 http://www.princeton.edu/~stengel/MAE342.html 1 Angular Attitude of Satellite Configurations • Spinning satellites – Angular attitude maintained by gyroscopic moment • Randomly oriented satellites and magnetic coil – Angular attitude is free to vary – Axisymmetric distribution of mass, solar cells, and instruments Television Infrared Observation (TIROS-7) Orbital Satellite Carrying Amateur Radio (OSCAR-1) ESSA-2 TIROS “Cartwheel” 2 2 1 2/12/20 Attitude-Controlled Satellite Configurations • Dual-spin satellites • Attitude-controlled satellites – Angular attitude maintained by gyroscopic moment and thrusters – Angular attitude maintained by 3-axis control system – Axisymmetric distribution of mass and solar cells – Non-symmetric distribution of mass, solar cells – Instruments and antennas do not spin and instruments INTELSAT-IVA NOAA-17 3 3 LADEE Bus Modules Satellite Buses Standardization of common components for a variety of missions Modular Common Spacecraft Bus Lander Congiguration 4 4 2 2/12/20 Hine et al 5 5 Evolution -

Reaping the Full Benefits of Copernicus After 2020 -The Ambitions of the European Space Industry
Reaping the full benefits of Copernicus after 2020 -The ambitions of the European space industry- Key elements on the Copernicus programme Introduction: what Copernicus is Copernicus is a user-driven program and the result of a common ambition (EU, European Space Agency and the Member States) to build a European autonomous capacity in the field of earth observation, providing reliable, up-to-date, free, full and open information in six thematic areas (“services”): land monitoring, marine monitoring, atmospheric monitoring, climate change, emergency management and security. The programme is composed of a space (Sentinels & contributing missions), in-situ (ground- based, sea-borne or air-borne monitoring systems) and service component. Copernicus space segment: a long-term & complex infrastructure Initially deployed since 2014, the constellation of Sentinels consists of the following satellites1: Sentinel-1 All-weather, day and night radar imagery for land and ocean services Sentinel-2 High-resolution optical imagery for land services Sentinel-3 High-accuracy optical, radar and altimetry data for marine and land services Sentinel-4 and Data for atmospheric composition monitoring from geostationary Sentinel-5 orbit and polar orbit (instruments carried on the next generation of meteorological satellites, i.e Meteosat Third Generation (MTG) and MetOp Second Generation) Sentinel-5 Bridge the gap between Envisat (Sciamachy data in particular) and Precursor Sentinel-5 Sentinel-6 Radar altimetry data to measure global sea-surface height, primarily for operational oceanography and for climate studies Rationale for Copernicus continuation and evolution Users want “more Copernicus”! The intense use (> 120 000 registered users2) and increased awareness for the potential of Copernicus have generated great expectations for an evolved Copernicus system. -

Join the Copernicus Data Access Revolution!
Join the Copernicus Data Access revolution! 1 / 6 You can participate in the development of Data Information Access Service of EUMETSAT and its partners. Sometimes we tend to take new technologies for granted. We forget what life was like when there were no smartphones, no satellite navigation, and no mobile apps to guide us through our daily lives. Similarly, it is easy to forget what it was like before the Copernicus Programme was launched with the numerous benefits it brought to the scientific community, entrepreneurs and large businesses, decision makers and individual citizens. Let’s have a quick recap of the Programme: The first Copernicus services were declared operational in the spring of 2012 when the Land Monitoring and Emergency Management services started delivering data The Marine Environment Monitoring Service and the Atmosphere Monitoring Service entered full-scale operations in the Spring of 2015 Climate Change and Security went operational in 2017 The first of our Sentinel satellites, Sentinel-1A, was commissioned in September 2014 Sentinel-2A followed in 2015 Sentinel-3A was launched in July 2016 And Sentinel-2B was launched in June 2017 2 / 6 Initially, the founding fathers of the GMES initiative (former name of the Copernicus Programme) had mainly foreseen the delivery of space-enabled environmental and security-related information to a few thousands of public decision-makers in the EU institutions and the Member States. But as it happens with many technologies, it went beyond the expectations of the founders. Thanks to the development of computing and processing capabilities, to the internet revolution, and the full, free and open data policy of the Programme, the benefits are reaching more people globally and much faster than anyone could have forecasted.