Evaluation of Smartphone Imus for Small Mobile Search and Rescue Robots
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
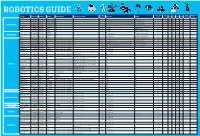
Robotics Section Guide for Web.Indd
ROBOTICS GUIDE Soldering Teachers Notes Early Higher Hobby/Home The Robot Product Code Description The Brand Assembly Required Tools That May Be Helpful Devices Req Software KS1 KS2 KS3 KS4 Required Available Years Education School VEX 123! 70-6250 CLICK HERE VEX No ✘ None No ✔ ✔ ✔ ✔ Dot 70-1101 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Dash 70-1100 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ ✔ Ready to Go Robot Cue 70-1108 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Codey Rocky 75-0516 CLICK HERE Makeblock No ✘ PC, Laptop Free downloadb ale Mblock Software ✔ ✔ ✔ ✔ Ozobot 70-8200 CLICK HERE Ozobot No ✘ PC, Laptop Free downloads ✔ ✔ ✔ ✔ Ohbot 76-0000 CLICK HERE Ohbot No ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ SoftBank NAO 70-8893 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Humanoid Robots SoftBank Pepper 70-8870 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Ohbot 76-0001 CLICK HERE Ohbot Assembly is part of the fun & learning! ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ FABLE 00-0408 CLICK HERE Shape Robotics Assembly is part of the fun & learning! ✘ PC, Laptop or Ipad Free Downloadable ✔ ✔ ✔ ✔ VEX GO! 70-6311 CLICK HERE VEX Assembly is part of the fun & learning! ✘ Windows, Mac, -

Fetishism and the Culture of the Automobile
FETISHISM AND THE CULTURE OF THE AUTOMOBILE James Duncan Mackintosh B.A.(hons.), Simon Fraser University, 1985 THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARTS in the Department of Communication Q~amesMackintosh 1990 SIMON FRASER UNIVERSITY August 1990 All rights reserved. This work may not be reproduced in whole or in part, by photocopy or other means, without permission of the author. APPROVAL NAME : James Duncan Mackintosh DEGREE : Master of Arts (Communication) TITLE OF THESIS: Fetishism and the Culture of the Automobile EXAMINING COMMITTEE: Chairman : Dr. William D. Richards, Jr. \ -1 Dr. Martih Labbu Associate Professor Senior Supervisor Dr. Alison C.M. Beale Assistant Professor \I I Dr. - Jerry Zqlove, Associate Professor, Department of ~n~lish, External Examiner DATE APPROVED : 20 August 1990 PARTIAL COPYRIGHT LICENCE I hereby grant to Simon Fraser University the right to lend my thesis or dissertation (the title of which is shown below) to users of the Simon Fraser University Library, and to make partial or single copies only for such users or in response to a request from the library of any other university, or other educational institution, on its own behalf or for one of its users. I further agree that permission for multiple copying of this thesis for scholarly purposes may be granted by me or the Dean of Graduate Studies. It is understood that copying or publication of this thesis for financial gain shall not be allowed without my written permission. Title of Thesis/Dissertation: Fetishism and the Culture of the Automobile. Author : -re James Duncan Mackintosh name 20 August 1990 date ABSTRACT This thesis explores the notion of fetishism as an appropriate instrument of cultural criticism to investigate the rites and rituals surrounding the automobile. -

As the Old Adage Goes
Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 1 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 2 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 3 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 4 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 5 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 6 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 7 As the old adage goes Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 8 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 9 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 10 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 11 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 12 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 13 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 14 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 15 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 16 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 17 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 18 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 19 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 20 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 21 Sosia&Pistoia srl - Tel.: 06.3219252 - eMail: [email protected] - Pagina 22 Rabu, 06 Januari 2016 How to Upgrade Infinix Hot Note Pro x551 & Infinix Hot x507 to Lollipop 5.1 - Huawei has announced the follow-up to last year's Nova (and Nova Plus). -
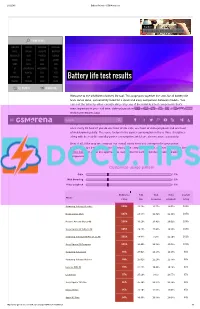
Battery Life Test Results HUAWEI TOSHIBA INTEX PLUM
2/12/2015 Battery life tests GSMArena.com Starborn SAMSUNG GALAXY S6 EDGE+ REVIEW PHONE FINDER SAMSUNG LENOVO VODAFONE VERYKOOL APPLE XIAOMI GIGABYTE MAXWEST MICROSOFT ACER PANTECH CELKON NOKIA ASUS XOLO GIONEE SONY OPPO LAVA VIVO LG BLACKBERRY MICROMAX NIU HTC ALCATEL BLU YEZZ MOTOROLA ZTE SPICE PARLA Battery life test results HUAWEI TOSHIBA INTEX PLUM ALL BRANDS RUMOR MILL Welcome to the GSMArena battery life tool. This page puts together the stats for all battery life tests we've done, conveniently listed for a quick and easy comparison between models. You can sort the table by either overall rating or by any of the individual test components that's most important to you call time, video playback or web browsing.TIP US 828K 100K You can find all about our84K 137K RSS LOG IN SIGN UP testing procedures here. SearchOur overall rating gives you an idea of how much battery backup you can get on a single charge. An overall rating of 40h means that you'll need to fully charge the device in question once every 40 hours if you do one hour of 3G calls, one hour of video playback and one hour of web browsing daily. The score factors in the power consumption in these three disciplines along with the reallife standby power consumption, which we also measure separately. Best of all, if the way we compute our overall rating does not correspond to your usage pattern, you are free to adjust the different usage components to get a closer match. Use the sliders below to adjust the approximate usage time for each of the three battery draining components. -
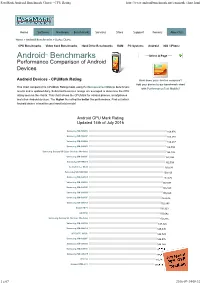
Passmark Android Benchmark Charts - CPU Rating
PassMark Android Benchmark Charts - CPU Rating http://www.androidbenchmark.net/cpumark_chart.html Home Software Hardware Benchmarks Services Store Support Forums About Us Home » Android Benchmarks » Device Charts CPU Benchmarks Video Card Benchmarks Hard Drive Benchmarks RAM PC Systems Android iOS / iPhone Android TM Benchmarks ----Select A Page ---- Performance Comparison of Android Devices Android Devices - CPUMark Rating How does your device compare? Add your device to our benchmark chart This chart compares the CPUMark Rating made using PerformanceTest Mobile benchmark with PerformanceTest Mobile ! results and is updated daily. Submitted baselines ratings are averaged to determine the CPU rating seen on the charts. This chart shows the CPUMark for various phones, smartphones and other Android devices. The higher the rating the better the performance. Find out which Android device is best for your hand held needs! Android CPU Mark Rating Updated 14th of July 2016 Samsung SM-N920V 166,976 Samsung SM-N920P 166,588 Samsung SM-G890A 166,237 Samsung SM-G928V 164,894 Samsung Galaxy S6 Edge (Various Models) 164,146 Samsung SM-G930F 162,994 Samsung SM-N920T 162,504 Lemobile Le X620 159,530 Samsung SM-N920W8 159,160 Samsung SM-G930T 157,472 Samsung SM-G930V 157,097 Samsung SM-G935P 156,823 Samsung SM-G930A 155,820 Samsung SM-G935F 153,636 Samsung SM-G935T 152,845 Xiaomi MI 5 150,923 LG H850 150,642 Samsung Galaxy S6 (Various Models) 150,316 Samsung SM-G935A 147,826 Samsung SM-G891A 145,095 HTC HTC_M10h 144,729 Samsung SM-G928F 144,576 Samsung -

Any Phone. Anywhere. Comfirmed Compatible Devices for HEADSET
Any phone. Anywhere. TRANSCEND YOUR REALITY. ANY PHONE. ANYWHERE. Comfirmed Compatible Devices for HEADSET Confirmed Compatible Device for NOON VR APP Apple iPhone 7, iPhone 6 Plus, Samsung Galaxy S7, S7 edge, S6, S6 edge plus, S5, Apple iPhone 7, iPhone 6 Plus, 6, iPhone SE, iPhone 5S, 5, 5C, 4S Samsung Galaxy S4, S3, A5, Note 4, Note 4, Note Edge, Note 3, Note 2, LG V10, Optimus G5, G4, G3, S7, S7 edge, S6, S6 edge plus, S5, S4, S3, Galaxy Note 5, 4, 3, 2, edge LG V10, G5, G2, Nexus 5, Xiaomi MI4, MI Note, Red MI2, Red MI Note Google Pixel G4, G3, G2, Nexus 5, Xiaomi MI4, MI Note, Red MI2, Red MI Note Google Pixel Oneplus One Huawei Y625, Honor 6 Plus, ASUS Zenfone 2, Sony Xperia Z3, Oneplus One Huawei Ascend mate 7, Honor 6 Plus, ASUS Zenfone 2, Sony Xperia Z3, Xperia Z2, Meizu M1 Note, MX4 OPPO N3 Z2, Meizu M1 Note, MX4 Sharp Aquos phone Motorola Nexus 6, Moto G - Supports most smartphones with gyroscopic sensors and screen sizes 4.7” to 5.7” - Each activation code will allow access for up to 3 devices. with a resolution equal to or higher than FULL HD. - Head tracking and tapping functionality is not available on smartphones without gyroscopic sensors. (Nonhyon-dong) 25, Hakdong-ro 46-gil, Gangnam-gu, Seoul Email : [email protected] Website : noonvr.com Office : +82-2-514-9850 facebook.com/getnoonvr @getnoonvr @getnoonvr The ultimate mobile VR experience Ergonomic Design NOON VR PRO supports most smartphones NOON VR PRO introduces incomparable fa- with gyroscopic sensors and cial comfort and skin protection to accomo- screen sizes 4.7 “~ 5.7” with a resolution date extensive headset use. -

Electronic 3D Models Catalogue (On July 26, 2019)
Electronic 3D models Catalogue (on July 26, 2019) Acer 001 Acer Iconia Tab A510 002 Acer Liquid Z5 003 Acer Liquid S2 Red 004 Acer Liquid S2 Black 005 Acer Iconia Tab A3 White 006 Acer Iconia Tab A1-810 White 007 Acer Iconia W4 008 Acer Liquid E3 Black 009 Acer Liquid E3 Silver 010 Acer Iconia B1-720 Iron Gray 011 Acer Iconia B1-720 Red 012 Acer Iconia B1-720 White 013 Acer Liquid Z3 Rock Black 014 Acer Liquid Z3 Classic White 015 Acer Iconia One 7 B1-730 Black 016 Acer Iconia One 7 B1-730 Red 017 Acer Iconia One 7 B1-730 Yellow 018 Acer Iconia One 7 B1-730 Green 019 Acer Iconia One 7 B1-730 Pink 020 Acer Iconia One 7 B1-730 Orange 021 Acer Iconia One 7 B1-730 Purple 022 Acer Iconia One 7 B1-730 White 023 Acer Iconia One 7 B1-730 Blue 024 Acer Iconia One 7 B1-730 Cyan 025 Acer Aspire Switch 10 026 Acer Iconia Tab A1-810 Red 027 Acer Iconia Tab A1-810 Black 028 Acer Iconia A1-830 White 029 Acer Liquid Z4 White 030 Acer Liquid Z4 Black 031 Acer Liquid Z200 Essential White 032 Acer Liquid Z200 Titanium Black 033 Acer Liquid Z200 Fragrant Pink 034 Acer Liquid Z200 Sky Blue 035 Acer Liquid Z200 Sunshine Yellow 036 Acer Liquid Jade Black 037 Acer Liquid Jade Green 038 Acer Liquid Jade White 039 Acer Liquid Z500 Sandy Silver 040 Acer Liquid Z500 Aquamarine Green 041 Acer Liquid Z500 Titanium Black 042 Acer Iconia Tab 7 (A1-713) 043 Acer Iconia Tab 7 (A1-713HD) 044 Acer Liquid E700 Burgundy Red 045 Acer Liquid E700 Titan Black 046 Acer Iconia Tab 8 047 Acer Liquid X1 Graphite Black 048 Acer Liquid X1 Wine Red 049 Acer Iconia Tab 8 W 050 Acer -

PROTOTYPE for QUADRUPED ROBOT USING Iot to DELIVER MEDICINES and ESSENTIALS to COVID-19 PATIENT
International Journal of Advanced Research in Engineering and Technology (IJARET) 4Volume 12, Issue 5, May 2021, pp. 147-155, Article ID: IJARET_12_05_014 Available online at https://iaeme.com/Home/issue/IJARET?Volume=12&Issue=5 ISSN Print: 0976-6480 and ISSN Online: 0976-6499 DOI: 10.34218/IJARET.12.5.2021.014 © IAEME Publication Scopus Indexed PROTOTYPE FOR QUADRUPED ROBOT USING IoT TO DELIVER MEDICINES AND ESSENTIALS TO COVID-19 PATIENT Anita Chaudhari, Jeet Thakur and Pratiksha Mhatre Department of Information Technology, St. John College of Engineering and Management, Palghar, Maharashtra, India ABSTRACT The Wheeled robots cannot work properly on the rocky surface or uneven surface. They consume a lot of power and struggle when they go on rocky surface. To tackle the disadvantages of wheeled robot we replaced the wheels like shaped legs with the spider legs or spider arms. Quadruped robot has complicated moving patterns and it can also move on surfaces where wheeled shaped robots would fail. They can easily walk on rocky or uneven surface. The main purpose of the project is to develop a consistent platform that enables the implementation of steady and fast static/dynamic walking on ground/Platform to deliver medicines to covid-19 patients. The main advantage of spider robot also called as quadruped robot is that it is Bluetooth controlled robot, through the android application, we can control robot from anywhere; it avoids the obstacle using ultrasonic sensor. Key words: Bluetooth module, Quadruped, Rough-terrain robots. Cite this Article: Anita Chaudhari, Jeet Thakur and Pratiksha Mhatre, Prototype for Quadruped Robot using IoT to Deliver Medicines and Essentials to Covid-19 Patient, International Journal of Advanced Research in Engineering and Technology, 12(5), 2021, pp. -

Service Robots 7 Mouser Staff
1 1 TABLE OF CONTENTS Welcome from the Editor 3 Deborah S. Ray Foreword 6 Grant Imahara Introduction to Service Robots 7 Mouser Staff Sanbot Max: Anatomy of a Service Robot 11 Steven Keeping CIMON Says: Design Lessons from a Robot Assistant in Space 17 Traci Browne 21 Revisiting the Uncanny Valley Jon Gabay Robotic Hands Strive for Human Capabilities 25 Bill Schweber Robotic Gesturing Meets Sign Language 30 Bill Schweber Mouser and Mouser Electronics are registered trademarks of Mouser Electronics, Inc. Other products, logos, and company names mentioned herein may be trademarks of their respective owners. Reference designs, conceptual illustrations, and other graphics included herein are for informational purposes only. Copyright © 2018 Mouser Electronics, Inc. – A TTI and Berkshire Hathaway company. 2 WELCOME FROM THE EDITOR If you’re just now joining us for favorite robots from our favorite This eBook accompanies EIT Video Mouser’s 2018 Empowering shows and movies: Star Wars, Star #3, which features the Henn na Innovation Together™ (EIT) program, Trek, Lost in Space, and Dr. Who. Hotel, the world’s first hotel staffed welcome! This year’s EIT program— by robots. Geared toward efficiency Generation Robot—explores robotics In this EIT segment, we explore and customer comfort, these robots as a technology capable of impacting service robots, which combine not only provide an extraordinary and changing our lives in the 21st principles of automation with that experience of efficiency and comfort, century much like the automobile of robotics to assist humans with but also a fascinating and heart- impacted the 20th century and tasks that are dirty, dangerous, heavy, warming experience for guests. -
Sviluppo Di Un'app Android Per Il Robot Sanbot
Università degli Studi di Padova Dipartimento di Matematica "Tullio Levi-Civita" Corso di Laurea in Informatica Sviluppo di un’app Android per il robot Sanbot Tesi di laurea triennale Relatore Prof. Mauro Conti Laureando Nicolae Andrei Tabacariu Anno Accademico 2017-2018 Nicolae Andrei Tabacariu: Sviluppo di un’app Android per il robot Sanbot, Tesi di laurea triennale, c Settembre 2018. “Life is really simple, but we insist on making it complicated” — Confucius Ringraziamenti Innanzitutto, vorrei esprimere la mia gratitudine al Prof. Mauro Conti, relatore della mia tesi, per l’aiuto e il sostegno fornitomi durante l’attività di stage e la stesura del presente documento. Desidero ringraziare con affetto la mia famiglia e la mia ragazza Erica, che mi hanno sostenuto economicamente ed emotivamente in questi anni di studio, senza i quali probabilmente non sarei mai arrivato alla fine di questo percorso. Desidero poi ringraziare gli amici e i compagni che mi hanno accompagnato in questi anni e che mi hanno dato sostegno ed affetto. Infine porgo i miei ringraziamenti a tutti i componenti di Omitech S.r.l. per l’opportunità di lavorare con loro, per il rispetto e la cordialità con cui mi hanno trattato. Padova, Settembre 2018 Nicolae Andrei Tabacariu iii Indice 1 Introduzione1 1.1 L’azienda . .1 1.2 Il progetto di stage . .2 1.3 Organizzazione dei contenuti . .2 2 Descrizione dello stage3 2.1 Il progetto di stage . .3 2.1.1 Analisi dei rischi . .4 2.1.2 Obiettivi fissati . .4 2.1.3 Pianificazione del lavoro . .5 2.1.4 Interazione con i tutor . -

Android Science - Toward a New Cross-Interdisciplinary Framework
Android Science - Toward a new cross-interdisciplinary framework - Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University [email protected] 1 Android science Appearance and behavior In the evaluation of interactive robots, the performance measures are sub- jective impression of human subjects who interact with the robot and their unconscious reactions, such as synchronized human behaviors in the interac- tions and eye movements. Obviously, both the appearance and behavior of the robots are important factors in this evaluation. There are many technical reports that compare robots with di®erent behaviors. However nobody has focused on appearance in the previous robotics. There many empirical discussions on very simpli¯ed static robots, say dolls. Designing the robot's appearance, especially to give it a humanoid one, was always a role of the industrial designer. However we con- sider this to be a serious problem for developing and evaluating interactive robots. Appearance and behavior are tightly coupled with both each other and these problems, as the results of evaluation change with appearance. In our previous work, we developed several humanoids for communicating with people [3][4][5], as shown in Figure 1. We empirically know the e®ect of appear- ance is as signi¯cant as behaviors in communication. Human brain functions that recognize people support our empirical knowledge. Android Science To tackle the problem of appearance and behavior, two approaches are nec- essary: one from robotics and the other from cognitive science. The ap- proach from robotics tries to build very humanlike robots based on knowl- edge from cognitive science. -
A Low Cost Prototypal Robotic Platform for Underwater Survey in Shallow Water
Advances in Robotics & Mechanical Engineering DOI: 10.32474/ARME.2020.02.000150 ISSN: 2643-6736 Research Article A Low Cost Prototypal Robotic Platform for Underwater Survey in Shallow Water Conte G*, Scaradozzi D and Ciuccoli N Dipartimento di Ingegneria dell’Informazione, Università Politecnica delle Marche, Italy *Corresponding author: G Conte, Dipartimento di Ingegneria dell’Informazione, Università Politecnica delle Marche, 60131 Ancona, Received: November 12, 2020 Published: November 30, 2020 Abstract A small, innovative robotic platform for underwater surveys in shallow water is proposed. The platform integrates a The mechatronic structure and the control architecture of the platform are described together with its functional features. Tests commercially available, remotely operated, underwater micro vehicle and a specifically designed and constructed actuated buoy. geolocalizing underwater targets. to validate the implemented constructive solutions are briefly reported, together with functional tests to assess usability in Keywords: Marine robotics; Remotely operated vehicles; Autonomous surface vehicles Introduction functional structure surface and underwater vehicles may be Remotely operated underwater vehicles or ROV are a fundamental tool for inspecting underwater structures in e.g. paper, we describe the development of a small prototypal hybrid costly, complex to operate and logistically demanding. In this robotic platform that overcomes these limiting characteristics. The of an ROV with a surface autonomous vehicle or ASV, which harbour areas, rivers, natural and artificial lakes. Integration platform integrates an actuated buoy, as surface component, and acts as a bridge for communication with a remote station, can The idea of coupling cooperating autonomous surface vehicles and a micro-ROV, as underwater component. The bouy and the micro- significantly increase autonomy, versatility and efficiency [1,2].