Design of an Open Source-Based Control Platform for an Underwater Remotely Operated Vehicle Diseño De Una Plataforma De Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Kinematic Modeling of a Rhex-Type Robot Using a Neural Network
Kinematic Modeling of a RHex-type Robot Using a Neural Network Mario Harpera, James Paceb, Nikhil Guptab, Camilo Ordonezb, and Emmanuel G. Collins, Jr.b aDepartment of Scientific Computing, Florida State University, Tallahassee, FL, USA bDepartment of Mechanical Engineering, Florida A&M - Florida State University, College of Engineering, Tallahassee, FL, USA ABSTRACT Motion planning for legged machines such as RHex-type robots is far less developed than motion planning for wheeled vehicles. One of the main reasons for this is the lack of kinematic and dynamic models for such platforms. Physics based models are difficult to develop for legged robots due to the difficulty of modeling the robot-terrain interaction and their overall complexity. This paper presents a data driven approach in developing a kinematic model for the X-RHex Lite (XRL) platform. The methodology utilizes a feed-forward neural network to relate gait parameters to vehicle velocities. Keywords: Legged Robots, Kinematic Modeling, Neural Network 1. INTRODUCTION The motion of a legged vehicle is governed by the gait it uses to move. Stable gaits can provide significantly different speeds and types of motion. The goal of this paper is to use a neural network to relate the parameters that define the gait an X-RHex Lite (XRL) robot uses to move to angular, forward and lateral velocities. This is a critical step in developing a motion planner for a legged robot. The approach taken in this paper is very similar to approaches taken to learn forward predictive models for skid-steered robots. For example, this approach was used to learn a forward predictive model for the Crusher UGV (Unmanned Ground Vehicle).1 RHex-type robot may be viewed as a special case of skid-steered vehicle as their rotating C-legs are always pointed in the same direction. -
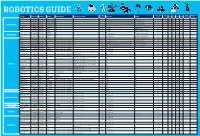
Robotics Section Guide for Web.Indd
ROBOTICS GUIDE Soldering Teachers Notes Early Higher Hobby/Home The Robot Product Code Description The Brand Assembly Required Tools That May Be Helpful Devices Req Software KS1 KS2 KS3 KS4 Required Available Years Education School VEX 123! 70-6250 CLICK HERE VEX No ✘ None No ✔ ✔ ✔ ✔ Dot 70-1101 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Dash 70-1100 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ ✔ Ready to Go Robot Cue 70-1108 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Codey Rocky 75-0516 CLICK HERE Makeblock No ✘ PC, Laptop Free downloadb ale Mblock Software ✔ ✔ ✔ ✔ Ozobot 70-8200 CLICK HERE Ozobot No ✘ PC, Laptop Free downloads ✔ ✔ ✔ ✔ Ohbot 76-0000 CLICK HERE Ohbot No ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ SoftBank NAO 70-8893 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Humanoid Robots SoftBank Pepper 70-8870 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Ohbot 76-0001 CLICK HERE Ohbot Assembly is part of the fun & learning! ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ FABLE 00-0408 CLICK HERE Shape Robotics Assembly is part of the fun & learning! ✘ PC, Laptop or Ipad Free Downloadable ✔ ✔ ✔ ✔ VEX GO! 70-6311 CLICK HERE VEX Assembly is part of the fun & learning! ✘ Windows, Mac, -

Fetishism and the Culture of the Automobile
FETISHISM AND THE CULTURE OF THE AUTOMOBILE James Duncan Mackintosh B.A.(hons.), Simon Fraser University, 1985 THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARTS in the Department of Communication Q~amesMackintosh 1990 SIMON FRASER UNIVERSITY August 1990 All rights reserved. This work may not be reproduced in whole or in part, by photocopy or other means, without permission of the author. APPROVAL NAME : James Duncan Mackintosh DEGREE : Master of Arts (Communication) TITLE OF THESIS: Fetishism and the Culture of the Automobile EXAMINING COMMITTEE: Chairman : Dr. William D. Richards, Jr. \ -1 Dr. Martih Labbu Associate Professor Senior Supervisor Dr. Alison C.M. Beale Assistant Professor \I I Dr. - Jerry Zqlove, Associate Professor, Department of ~n~lish, External Examiner DATE APPROVED : 20 August 1990 PARTIAL COPYRIGHT LICENCE I hereby grant to Simon Fraser University the right to lend my thesis or dissertation (the title of which is shown below) to users of the Simon Fraser University Library, and to make partial or single copies only for such users or in response to a request from the library of any other university, or other educational institution, on its own behalf or for one of its users. I further agree that permission for multiple copying of this thesis for scholarly purposes may be granted by me or the Dean of Graduate Studies. It is understood that copying or publication of this thesis for financial gain shall not be allowed without my written permission. Title of Thesis/Dissertation: Fetishism and the Culture of the Automobile. Author : -re James Duncan Mackintosh name 20 August 1990 date ABSTRACT This thesis explores the notion of fetishism as an appropriate instrument of cultural criticism to investigate the rites and rituals surrounding the automobile. -

Towards Autonomous Localization of an Underwater Drone
TOWARDS AUTONOMOUS LOCALIZATION OF AN UNDERWATER DRONE A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree Master of Science in Computer Science by Nathan Sfard June 2018 c 2018 Nathan Sfard ALL RIGHTS RESERVED ii COMMITTEE MEMBERSHIP TITLE: Towards Autonomous Localization of an Underwater Drone AUTHOR: Nathan Sfard DATE SUBMITTED: June 2018 COMMITTEE CHAIR: Lynne Slivovsky, Ph.D. Professor of Computer Engineering COMMITTEE MEMBER: John Seng, Ph.D. Professor of Computer Science COMMITTEE MEMBER: Xiao-Hua Yu, Ph.D. Professor of Electrical Engineering iii ABSTRACT Towards Autonomous Localization of an Underwater Drone Nathan Sfard Autonomous vehicle navigation is a complex and challenging task. Land and aerial vehicles often use highly accurate GPS sensors to localize themselves in their envi- ronments. These sensors are ineffective in underwater environments due to signal attenuation. Autonomous underwater vehicles utilize one or more of the following approaches for successful localization and navigation: inertial/dead-reckoning, acous- tic signals, and geophysical data. This thesis examines autonomous localization in a simulated environment for an OpenROV Underwater Drone using a Kalman Fil- ter. This filter performs state estimation for a dead reckoning system exhibiting an additive error in location measurements. We evaluate the accuracy of this Kalman Filter by analyzing the effect each parameter has on accuracy, then choosing the best combination of parameter values to assess the overall accuracy of the Kalman Filter. We find that the two parameters with the greatest effects on the system are the con- stant acceleration and the measurement uncertainty of the system. -

Modeling and Simulation of Motion of an Underwater Robot
2016 International Symposium on Nonlinear Theory and Its Applications, NOLTA2016, Yugawara, Japan, November 27th-30th, 2016 Modeling and Simulation of Motion of an Underwater Robot Ryo Inoharay, Kaito Isogaiy, Hideo Nakanoz, and Hideaki Okazakiy yGraduate School of Engineering, Shonan Institute of Technology 1–1–25, Tsujidounishikaigan, Fujisawa-shi, Kanagawa Prefecture 251-8511, Japan zFaculty of Engineering, Shonan Institute of Technology 1–1–25, Tsujidounishikaigan, Fujisawa-shi, Kanagawa Prefecture 251-8511, Japan Email: [email protected], [email protected], [email protected], [email protected] Abstract—This paper presents how system dynamics ics [1] of an underwater robot based on [2], [4]. The time and system control equations for an underwater robot were parameter t for all the stated variables, such as r(t), or Ω(t), derived using an Arnold-type operator to control the Open- etc., is omitted for convenience. We use the following no- ROV. Typical behavior of the OpenROV on MATLAB nu- tation as [2] (Fig 2): merical simulations is illustrated. ei 2 w (i = 1; 2; 3) are the base vectors of a right-handed Cartesian stationary coordinate system at the origin O; 2 = ; ; 1. Introduction Ei W (i 1 2 3) are the base vectors of a right moving coordinate system connected to the body at the center of Although there are several designs, control system equa- the mass Oc. tions, and dynamic equations for underwater robots, such as [1], unified methods to describe the dynamic equations Definition 1 Let w and W be oriented euclidean spaces for the rigid body kinetics of an underwater robot have yet (i.e. -

Development of an Underwater Robot
School of Science & Engineering Capstone Design Development of an Underwater Robot Oumaima Lamaakel Supervised by Dr. Kevin Scott Smith Submitted in partial fulfillment of the requirements for the degree of Bachelor of Science in General Engineering Spring 2018 2 DEVELOPMENT OF AN UNDERWATER ROBOT FOR MUD SAMPLES PICK UP Capstone Report Student Statement: The work submitted is solely prepared by Oumaima Lamaakel and it is original. Excerpts from other’s work have been clearly identified, acknowledged and listed in the list of references. The engineering drawings, computer programs, prototype development, and testing protocols reported in this document are also original and adhere to the engineering design ethics and safety measures. ______________________ Oumaima Lamaakel Approved by the supervisor: ______________________ Dr. Kevin Scott Smith 3 Acknowledgment I am highly indebted to my supervisors prof. Kevin Smith and prof. Lorraine Casazza for their guidance, constant supervision and support throughouts the whole year. I would like to express my gratitude to prof Veronique Van Lierde for helping understand the kinematics behind manipulators, prof. Asmae Khaldoun for her feedback regarding materials selection, prof. Yassine Salih Alj for his support and coordination work, the lab technician Mr Abderahim Boulakrouch, and Al Akhawayn University and the School of Science & Engineering for giving me the opportunity to pursue this project. My gratitude extends to the members of the ROV team, who helped me assemble the prototypes, especially Jade El Haimer for his invaluable help. I would also like to thank my dear family, friends for their support throughout my undergraduate education. 4 List of Tables and Figures Table 2 Comparison of Thrusters ........................................................................................... -

Dynamic Reconfiguration of Mission Parameters in Underwater Human
Dynamic Reconfiguration of Mission Parameters in Underwater Human-Robot Collaboration Md Jahidul Islam1, Marc Ho2, and Junaed Sattar3 Abstract— This paper presents a real-time programming and in the underwater domain, what would otherwise be straight- parameter reconfiguration method for autonomous underwater forward deployments in terrestrial settings often become ex- robots in human-robot collaborative tasks. Using a set of tremely complex undertakings for underwater robots, which intuitive and meaningful hand gestures, we develop a syntacti- cally simple framework that is computationally more efficient require close human supervision. Since Wi-Fi or radio (i.e., than a complex, grammar-based approach. In the proposed electromagnetic) communication is not available or severely framework, a convolutional neural network is trained to provide degraded underwater [7], such methods cannot be used accurate hand gesture recognition; subsequently, a finite-state to instruct an AUV to dynamically reconfigure command machine-based deterministic model performs efficient gesture- parameters. The current task thus needs to be interrupted, to-instruction mapping and further improves robustness of the interaction scheme. The key aspect of this framework is and the robot needs to be brought to the surface in order that it can be easily adopted by divers for communicating to reconfigure its parameters. This is inconvenient and often simple instructions to underwater robots without using artificial expensive in terms of time and physical resources. Therefore, tags such as fiducial markers or requiring memorization of a triggering parameter changes based on human input while the potentially complex set of language rules. Extensive experiments robot is underwater, without requiring a trip to the surface, are performed both on field-trial data and through simulation, which demonstrate the robustness, efficiency, and portability of is a simpler and more efficient alternative approach. -

Assessment of Couple Unmanned Aerial Vehicle-Portable Magnetic
International Journal of Scientific & Engineering Research Volume 11, Issue 1, January-2020 1271 ISSN 2229-5518 Assessment of Couple Unmanned Aerial Vehicle- Portable Magnetic Resonance Imaging Sensor for Precision Agriculture of Crops Balogun Wasiu A., Keshinro K.K, Momoh-Jimoh E. Salami, Adegoke A. S., Adesanya G. E., Obadare Bolatito J Abstract— This paper proposes an improved benefits of integration of Unmanned Aerial vehicle (UAV) and Portable Magnetic Resonance Imaging (PMRI) system in relation to developing Precision Agricultural (PA) that is capable of carrying out a dynamic internal quality assessment of crop developmental stages during pre-harvest period. A comprehensive review was carried out on application of UAV technology to Precision Agriculture (PA) progress and evolving research work on developing a Portable MRI system. The disadvantages of using traditional way of obtaining Precision Agricultural (PA) were shown. Proposed Model Architecture of Coupled Unmanned Aerial vehicle (UAV) and Portable Magnetic Resonance Imaging (PMRI) System were developed and the advantages of the proposed system were displayed. It is predicted that the proposed method can be useful for Precision Agriculture (PA) which will reduce the cost implication of Pre-harvest processing of farm produce based on non-destructive technique. Index Terms— Unmanned Aerial vehicle, Portable Magnetic Resonance Imaging, Precision Agricultural, Non-destructive, Pre-harvest, Crops, Imaging, Permanent magnet —————————— —————————— 1 INTRODUCTION URING agricultural processing, quality control ensure Inspection of fresh fruit bunches (FFB) for harvesting is a rig- that food products meet certain quality and safety stand- orous assignment which can be overlooked or applied physi- D ards in a developed country [FAO]. Low profits in fruit cal counting that are usually not accurate or precise (Sham- farming are subjected by pre- and post-harvest factors. -

PROTOTYPE for QUADRUPED ROBOT USING Iot to DELIVER MEDICINES and ESSENTIALS to COVID-19 PATIENT
International Journal of Advanced Research in Engineering and Technology (IJARET) 4Volume 12, Issue 5, May 2021, pp. 147-155, Article ID: IJARET_12_05_014 Available online at https://iaeme.com/Home/issue/IJARET?Volume=12&Issue=5 ISSN Print: 0976-6480 and ISSN Online: 0976-6499 DOI: 10.34218/IJARET.12.5.2021.014 © IAEME Publication Scopus Indexed PROTOTYPE FOR QUADRUPED ROBOT USING IoT TO DELIVER MEDICINES AND ESSENTIALS TO COVID-19 PATIENT Anita Chaudhari, Jeet Thakur and Pratiksha Mhatre Department of Information Technology, St. John College of Engineering and Management, Palghar, Maharashtra, India ABSTRACT The Wheeled robots cannot work properly on the rocky surface or uneven surface. They consume a lot of power and struggle when they go on rocky surface. To tackle the disadvantages of wheeled robot we replaced the wheels like shaped legs with the spider legs or spider arms. Quadruped robot has complicated moving patterns and it can also move on surfaces where wheeled shaped robots would fail. They can easily walk on rocky or uneven surface. The main purpose of the project is to develop a consistent platform that enables the implementation of steady and fast static/dynamic walking on ground/Platform to deliver medicines to covid-19 patients. The main advantage of spider robot also called as quadruped robot is that it is Bluetooth controlled robot, through the android application, we can control robot from anywhere; it avoids the obstacle using ultrasonic sensor. Key words: Bluetooth module, Quadruped, Rough-terrain robots. Cite this Article: Anita Chaudhari, Jeet Thakur and Pratiksha Mhatre, Prototype for Quadruped Robot using IoT to Deliver Medicines and Essentials to Covid-19 Patient, International Journal of Advanced Research in Engineering and Technology, 12(5), 2021, pp. -

Service Robots 7 Mouser Staff
1 1 TABLE OF CONTENTS Welcome from the Editor 3 Deborah S. Ray Foreword 6 Grant Imahara Introduction to Service Robots 7 Mouser Staff Sanbot Max: Anatomy of a Service Robot 11 Steven Keeping CIMON Says: Design Lessons from a Robot Assistant in Space 17 Traci Browne 21 Revisiting the Uncanny Valley Jon Gabay Robotic Hands Strive for Human Capabilities 25 Bill Schweber Robotic Gesturing Meets Sign Language 30 Bill Schweber Mouser and Mouser Electronics are registered trademarks of Mouser Electronics, Inc. Other products, logos, and company names mentioned herein may be trademarks of their respective owners. Reference designs, conceptual illustrations, and other graphics included herein are for informational purposes only. Copyright © 2018 Mouser Electronics, Inc. – A TTI and Berkshire Hathaway company. 2 WELCOME FROM THE EDITOR If you’re just now joining us for favorite robots from our favorite This eBook accompanies EIT Video Mouser’s 2018 Empowering shows and movies: Star Wars, Star #3, which features the Henn na Innovation Together™ (EIT) program, Trek, Lost in Space, and Dr. Who. Hotel, the world’s first hotel staffed welcome! This year’s EIT program— by robots. Geared toward efficiency Generation Robot—explores robotics In this EIT segment, we explore and customer comfort, these robots as a technology capable of impacting service robots, which combine not only provide an extraordinary and changing our lives in the 21st principles of automation with that experience of efficiency and comfort, century much like the automobile of robotics to assist humans with but also a fascinating and heart- impacted the 20th century and tasks that are dirty, dangerous, heavy, warming experience for guests. -
Sviluppo Di Un'app Android Per Il Robot Sanbot
Università degli Studi di Padova Dipartimento di Matematica "Tullio Levi-Civita" Corso di Laurea in Informatica Sviluppo di un’app Android per il robot Sanbot Tesi di laurea triennale Relatore Prof. Mauro Conti Laureando Nicolae Andrei Tabacariu Anno Accademico 2017-2018 Nicolae Andrei Tabacariu: Sviluppo di un’app Android per il robot Sanbot, Tesi di laurea triennale, c Settembre 2018. “Life is really simple, but we insist on making it complicated” — Confucius Ringraziamenti Innanzitutto, vorrei esprimere la mia gratitudine al Prof. Mauro Conti, relatore della mia tesi, per l’aiuto e il sostegno fornitomi durante l’attività di stage e la stesura del presente documento. Desidero ringraziare con affetto la mia famiglia e la mia ragazza Erica, che mi hanno sostenuto economicamente ed emotivamente in questi anni di studio, senza i quali probabilmente non sarei mai arrivato alla fine di questo percorso. Desidero poi ringraziare gli amici e i compagni che mi hanno accompagnato in questi anni e che mi hanno dato sostegno ed affetto. Infine porgo i miei ringraziamenti a tutti i componenti di Omitech S.r.l. per l’opportunità di lavorare con loro, per il rispetto e la cordialità con cui mi hanno trattato. Padova, Settembre 2018 Nicolae Andrei Tabacariu iii Indice 1 Introduzione1 1.1 L’azienda . .1 1.2 Il progetto di stage . .2 1.3 Organizzazione dei contenuti . .2 2 Descrizione dello stage3 2.1 Il progetto di stage . .3 2.1.1 Analisi dei rischi . .4 2.1.2 Obiettivi fissati . .4 2.1.3 Pianificazione del lavoro . .5 2.1.4 Interazione con i tutor . -

Preview of Award 1312333
8/9/2018 RPPR - Preview Report My Desktop Prepare & Submit Proposals Prepare Proposals in FastLane New! Prepare Proposals (Limited proposal types) Proposal Status Awards & Reporting Notifications & Requests Project Reports Submit Images/Videos Award Functions Manage Financials Program Income Reporting Grantee Cash Management Section Contacts Administration User Management Research Administration Lookup NSF ID Preview of Award 1312333 - Annual Project Report Cover | Accomplishments | Products | Participants/Organizations | Impacts | Changes/Problems | Special Requirements Cover Federal Agency and Organization Element to Which Report is Submitted: 4900 Federal Grant or Other Identifying Number Assigned by Agency: 1312333 Project Title: Scaling Up Success: Using MATE's ROV Competitions to Build a Collaborative Learning Community that Fuels the Ocean STEM Workforce Pipeline PD/PI Name: Jill M Zande, Principal Investigator Candiya Mann, Co-Principal Investigator Deidre Sullivan, Co-Principal Investigator Recipient Organization: Monterey Peninsula College Project/Grant Period: 09/15/2013 - 08/31/2019 Reporting Period: 09/01/2017 - 08/31/2018 Submitting Official (if other than PD\PI): N/A Submission Date: N/A Signature of Submitting Official (signature shall be submitted in accordance with N/A agency specific instructions) Accomplishments * What are the major goals of the project? The information included within this report covers the period from May 16, 2017 through June 30, 2018. Our ITEST Scale-Up project, Scaling up Success: Using MATE’s ROV Competitions to Build a Collaborative Learning Community that Fuels the Ocean STEM Workforce Pipeline, expands the best practices that we identified, based on evaluation data and regional reporting, as most effective in reaching, engaging, and supporting student and teacher participation in STEM.