Creation and Staging of Android Theatre ``Sayonara'' Towards Developing Highly Human-Like Robots
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Limits of the Human
Limits of the human Machine s without limits? Phot. Geminoid F. Hiroshi Ishiguro ATR Laboratories © International Symposium Limits of the human, machines without limits? Contemporary stage and robotics: exchanges and collaborations October 6, 7, 8, 2021 University of Lausanne, Switzerland Organised by: Dr Izabella PLUTA, Colloquium Leader, University of Lausanne - Centre d'études théâtrales and Laboratoire de cultures et humanités digitales Dr Salvatore Maria ANZALONE, University Paris 8 - CHArt Laboratory Dr Gunter LÖSEL, Zurich University of the Arts - Institute for the Performing Arts and Film Dr Erica MAGRIS, University Paris 8 - Theatre Department Symposium office: Théo Arnulf (PhD Candidate, University Paris 8, Theatre Department), Stéphanie BARBETTA (Master’s Degree, University of Geneva, and independent artiste). To contact the office : [email protected] Supporting institution: Centre for Theatre Studies (Unil), Partners: College of Humanities Unil-EPFL, Zurich University of the Arts, Paris 8 University - Theatre and CHArt Laboratory Keywords: stage, robotics, prosthesis, robotic devices, creation, scientific research, uncanny valley, programming, creation process, neurosciences, transhumanism, digital humanities Scientific Committee: Prof. Marc Atallah (Univ. of Lausanne, Lausanne, Switzerland), Prof. Matteo Casari (Univ. of Bologna, Bologna, Italy) Dr. Ester Fuoco (Univ. of Genoa, Genoa, Italy), Dr. Aurélie Gallois (Espace culturel Nymphéa, Amiens, France), Dr. Simon Hagemann (PRAG, Univ. of Lorraine, Nancy, France), Dr. Louise LePage (Univ. of York, UK) Dr. Piotr Mirowski (DeepMind, UK) Prof. Anna Maria Monteverdi (Univ. of Milan, Milan, Italy), Prof. Emanuele Quinz (Univ. Paris 8, Paris 8, France), Prof. Zaven Paré (Uni. of Rio de Janeiro, Brazil) Prof. Thomas Riccio (University of Texas at Dallas, USA) Argumentation Many artists today have introduced robots into their creations, questioning aesthetic visions and exploring trans- and posthumanism. -
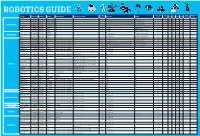
Robotics Section Guide for Web.Indd
ROBOTICS GUIDE Soldering Teachers Notes Early Higher Hobby/Home The Robot Product Code Description The Brand Assembly Required Tools That May Be Helpful Devices Req Software KS1 KS2 KS3 KS4 Required Available Years Education School VEX 123! 70-6250 CLICK HERE VEX No ✘ None No ✔ ✔ ✔ ✔ Dot 70-1101 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Dash 70-1100 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ ✔ Ready to Go Robot Cue 70-1108 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Codey Rocky 75-0516 CLICK HERE Makeblock No ✘ PC, Laptop Free downloadb ale Mblock Software ✔ ✔ ✔ ✔ Ozobot 70-8200 CLICK HERE Ozobot No ✘ PC, Laptop Free downloads ✔ ✔ ✔ ✔ Ohbot 76-0000 CLICK HERE Ohbot No ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ SoftBank NAO 70-8893 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Humanoid Robots SoftBank Pepper 70-8870 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Ohbot 76-0001 CLICK HERE Ohbot Assembly is part of the fun & learning! ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ FABLE 00-0408 CLICK HERE Shape Robotics Assembly is part of the fun & learning! ✘ PC, Laptop or Ipad Free Downloadable ✔ ✔ ✔ ✔ VEX GO! 70-6311 CLICK HERE VEX Assembly is part of the fun & learning! ✘ Windows, Mac, -

Fetishism and the Culture of the Automobile
FETISHISM AND THE CULTURE OF THE AUTOMOBILE James Duncan Mackintosh B.A.(hons.), Simon Fraser University, 1985 THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARTS in the Department of Communication Q~amesMackintosh 1990 SIMON FRASER UNIVERSITY August 1990 All rights reserved. This work may not be reproduced in whole or in part, by photocopy or other means, without permission of the author. APPROVAL NAME : James Duncan Mackintosh DEGREE : Master of Arts (Communication) TITLE OF THESIS: Fetishism and the Culture of the Automobile EXAMINING COMMITTEE: Chairman : Dr. William D. Richards, Jr. \ -1 Dr. Martih Labbu Associate Professor Senior Supervisor Dr. Alison C.M. Beale Assistant Professor \I I Dr. - Jerry Zqlove, Associate Professor, Department of ~n~lish, External Examiner DATE APPROVED : 20 August 1990 PARTIAL COPYRIGHT LICENCE I hereby grant to Simon Fraser University the right to lend my thesis or dissertation (the title of which is shown below) to users of the Simon Fraser University Library, and to make partial or single copies only for such users or in response to a request from the library of any other university, or other educational institution, on its own behalf or for one of its users. I further agree that permission for multiple copying of this thesis for scholarly purposes may be granted by me or the Dean of Graduate Studies. It is understood that copying or publication of this thesis for financial gain shall not be allowed without my written permission. Title of Thesis/Dissertation: Fetishism and the Culture of the Automobile. Author : -re James Duncan Mackintosh name 20 August 1990 date ABSTRACT This thesis explores the notion of fetishism as an appropriate instrument of cultural criticism to investigate the rites and rituals surrounding the automobile. -

Robot Theatre Marek Perkowski 1
Towards Robot Theatre Marek Perkowski 1. History of robot theatre 2. Modern robot theatre 3. Robot theatre at PSU 4. Models of robot theatre 5. Research topics on Robot Theatre 6. Future Robot Theatre History of Robot Theatre From antiquity until 1996 Heron’s Book Automata Robot Theatre of Hero • A collection of constructions called miracles of Alexandria (thaumata) for temples. • Heron describes automatic rotating objectives, noise such as thunder, automatic opening doors. • Philon from Byzanz describes the existence of automata in his book Mechaniki syntaxis, that includes pneumatic apparatus and automatic astronomical devices as early as 300 BC. Albertus Magnus and his robot head Albertus is recorded as having made a mechanical automaton in the form of a brass head that would answer questions put to it. Knight of Leonardo Da Vinci 1. Leonardo's robot refers to a humanoid automaton designed by Leonardo da Vinci around the year 1495. 2. The design notes for the robot appear in sketchbooks that were rediscovered in the 1950s. 3. It is not known whether or not an attempt was made to build the device during da Vinci's lifetime. 4. Since the discovery of the sketchbook, the robot has been built faithfully based on Leonardo's design; this proved it was fully functional. Duck of Vaucanson • The Canard Digérateur, or Digesting Duck, was an automaton in the form of a duck, created by Jacques de Vaucanson in 1739. • The mechanical duck appeared to have the ability to eat kernels of grain, and to metabolize and defecate them Constructed and unveiled in 1770 by Wolfgang von Turk of Kempelen Kempelen (1734–1804) to impress the Empress Maria Theresa • The Turk was in fact a mechanical illusion that allowed a human chess master hiding inside to operate the machine. -

Press Release 2009,12,03
Press Release 2009,12,03 AICHI TRIENNALE OFFICE Aichi Arts Center 6F, 1-13-2 Higashi-sakura, Higashi-ku, Nagoya, Aichi, 461-8525 JAPAN TEL:81-52-971-6111 FAX:81-52-971-6115 E-mail:[email protected] http://aichitriennale.jp/ New International Art Festival Aichi Triennale is opening in August and will run until October 2010! The “Aichi Triennale”, a new large-scale international art festival, opens its doors in August 2010. Inspired by the idea to transmit new art and culture from the heart of Aichi, the festival’s “Arts and Cities” themed first installment will focus on the latest trends in the international art circus by way of various shows of contemporary art and performing arts. One predominant feature of the “Aichi Triennale 2010”, in addition to a core of contemporary art exhibitions, will be the event’s additional focus on cutting-edge performing arts. An international lineup of artists that keep crossing the boundaries between dance, theater, music and art, present their works at the Aichi Arts Center, a cultural-arts complex that houses a museum and event halls, while making best use of the venue’s characteristics. In order to attract a large number of local citizens and visiting tourists next to dedicated art fans, various places in the city, including a number of symbolic spots representative for the Aichi region will function as backdrops for a fascinating art spectacle that will make this Triennale an absolutely unique experience. Contemporary art exhibitions and performances in Choja-machi, one of the three biggest textile wholesale districts in Japan, and other locations in central Nagoya are sure to charge the atmosphere with a “city festival” kind of mood. -

Hiroshi Ishiguro's Androids As Staged by Oriza Hirata Introduction
Theater and Robotics: Hiroshi Ishiguro’s Androids as Staged by Oriza Hirata Izabella Pluta Université de Lausanne (Suisse) Université Lyon 2 (France) Introduction: Theatre and technology1 The use of digital technology has become a frequent aesthetic choice in live perfor- mance and is particularly present in the scenic arts. The technology is integrated in different ways: almost all of light and sound tables today are digital; incorporated into the performance itself through objects and technological devices and even in the creation process, requiring IT research and specific collaborations. The “pro- duction with technological components” as Steve Dixon called it in Digital Perfor- mance (Dixon, 2007) or “intermedial performance” as defined in the field of inter- media (Cheng et al., 2010), is inscribed in the lineage of digital humanities where different areas are gathered together under the common denominator of advanced technologies. The production in question becomes, thus, at the same time creation and theatrical research, scientific and technological research. The idea of the robot is increasingly at the forefront.2 Today, one sees diversified productions interested in robots, made by artists long dedicated to this aesthetic, as well as by young proponents. For example, in 1991, Chico MacMurtrie created the Amorhic Robot Works (ARW), a collective of artists, engineers, and technicians who develop abstract and anthropomorphic robotic machines. This systematic work is seen in installations and environments, autonomous universes due to sce- nography, actors and the robotic plots. In 1996 Zaven Paré created an electronic puppet (initially with a video source, then digital and tele-remote), presented at 1 This article takes up some issues presented in the Communication “The Geminoid F or laboratory limits” in the session “Live Show and digital technology: the scientific laboratory to the theater sta- ge” held at the annual conference of the Digital Humanities in 2014, an event that had as its theme: Cultural Digital Empowerment. -

PROTOTYPE for QUADRUPED ROBOT USING Iot to DELIVER MEDICINES and ESSENTIALS to COVID-19 PATIENT
International Journal of Advanced Research in Engineering and Technology (IJARET) 4Volume 12, Issue 5, May 2021, pp. 147-155, Article ID: IJARET_12_05_014 Available online at https://iaeme.com/Home/issue/IJARET?Volume=12&Issue=5 ISSN Print: 0976-6480 and ISSN Online: 0976-6499 DOI: 10.34218/IJARET.12.5.2021.014 © IAEME Publication Scopus Indexed PROTOTYPE FOR QUADRUPED ROBOT USING IoT TO DELIVER MEDICINES AND ESSENTIALS TO COVID-19 PATIENT Anita Chaudhari, Jeet Thakur and Pratiksha Mhatre Department of Information Technology, St. John College of Engineering and Management, Palghar, Maharashtra, India ABSTRACT The Wheeled robots cannot work properly on the rocky surface or uneven surface. They consume a lot of power and struggle when they go on rocky surface. To tackle the disadvantages of wheeled robot we replaced the wheels like shaped legs with the spider legs or spider arms. Quadruped robot has complicated moving patterns and it can also move on surfaces where wheeled shaped robots would fail. They can easily walk on rocky or uneven surface. The main purpose of the project is to develop a consistent platform that enables the implementation of steady and fast static/dynamic walking on ground/Platform to deliver medicines to covid-19 patients. The main advantage of spider robot also called as quadruped robot is that it is Bluetooth controlled robot, through the android application, we can control robot from anywhere; it avoids the obstacle using ultrasonic sensor. Key words: Bluetooth module, Quadruped, Rough-terrain robots. Cite this Article: Anita Chaudhari, Jeet Thakur and Pratiksha Mhatre, Prototype for Quadruped Robot using IoT to Deliver Medicines and Essentials to Covid-19 Patient, International Journal of Advanced Research in Engineering and Technology, 12(5), 2021, pp. -

Service Robots 7 Mouser Staff
1 1 TABLE OF CONTENTS Welcome from the Editor 3 Deborah S. Ray Foreword 6 Grant Imahara Introduction to Service Robots 7 Mouser Staff Sanbot Max: Anatomy of a Service Robot 11 Steven Keeping CIMON Says: Design Lessons from a Robot Assistant in Space 17 Traci Browne 21 Revisiting the Uncanny Valley Jon Gabay Robotic Hands Strive for Human Capabilities 25 Bill Schweber Robotic Gesturing Meets Sign Language 30 Bill Schweber Mouser and Mouser Electronics are registered trademarks of Mouser Electronics, Inc. Other products, logos, and company names mentioned herein may be trademarks of their respective owners. Reference designs, conceptual illustrations, and other graphics included herein are for informational purposes only. Copyright © 2018 Mouser Electronics, Inc. – A TTI and Berkshire Hathaway company. 2 WELCOME FROM THE EDITOR If you’re just now joining us for favorite robots from our favorite This eBook accompanies EIT Video Mouser’s 2018 Empowering shows and movies: Star Wars, Star #3, which features the Henn na Innovation Together™ (EIT) program, Trek, Lost in Space, and Dr. Who. Hotel, the world’s first hotel staffed welcome! This year’s EIT program— by robots. Geared toward efficiency Generation Robot—explores robotics In this EIT segment, we explore and customer comfort, these robots as a technology capable of impacting service robots, which combine not only provide an extraordinary and changing our lives in the 21st principles of automation with that experience of efficiency and comfort, century much like the automobile of robotics to assist humans with but also a fascinating and heart- impacted the 20th century and tasks that are dirty, dangerous, heavy, warming experience for guests. -
Sviluppo Di Un'app Android Per Il Robot Sanbot
Università degli Studi di Padova Dipartimento di Matematica "Tullio Levi-Civita" Corso di Laurea in Informatica Sviluppo di un’app Android per il robot Sanbot Tesi di laurea triennale Relatore Prof. Mauro Conti Laureando Nicolae Andrei Tabacariu Anno Accademico 2017-2018 Nicolae Andrei Tabacariu: Sviluppo di un’app Android per il robot Sanbot, Tesi di laurea triennale, c Settembre 2018. “Life is really simple, but we insist on making it complicated” — Confucius Ringraziamenti Innanzitutto, vorrei esprimere la mia gratitudine al Prof. Mauro Conti, relatore della mia tesi, per l’aiuto e il sostegno fornitomi durante l’attività di stage e la stesura del presente documento. Desidero ringraziare con affetto la mia famiglia e la mia ragazza Erica, che mi hanno sostenuto economicamente ed emotivamente in questi anni di studio, senza i quali probabilmente non sarei mai arrivato alla fine di questo percorso. Desidero poi ringraziare gli amici e i compagni che mi hanno accompagnato in questi anni e che mi hanno dato sostegno ed affetto. Infine porgo i miei ringraziamenti a tutti i componenti di Omitech S.r.l. per l’opportunità di lavorare con loro, per il rispetto e la cordialità con cui mi hanno trattato. Padova, Settembre 2018 Nicolae Andrei Tabacariu iii Indice 1 Introduzione1 1.1 L’azienda . .1 1.2 Il progetto di stage . .2 1.3 Organizzazione dei contenuti . .2 2 Descrizione dello stage3 2.1 Il progetto di stage . .3 2.1.1 Analisi dei rischi . .4 2.1.2 Obiettivi fissati . .4 2.1.3 Pianificazione del lavoro . .5 2.1.4 Interazione con i tutor . -

2345 Oriza Hirata and the Emergence of A
Melcher 1 Sterling Melcher 7 March 2017 Pig Iron Seminar II Prof. Kuharski Word Count: 2,345 Oriza Hirata and the Emergence of Androids in Society The emergence of android1 technology and its consequences for human society is a long- running tradition of inquiry for science-fiction writers. Writers such as Philip K. Dick and Isaac Asimov have written many novels about what it means to be human in a technologically advanced age. If humans create something that mimics human nature, is it equal to humanity, is it under our control, or will it surpass us in intelligence and ability, ultimately changing the hierarchy of natural beings on Earth? These are at the forefront of many modern philosophers' minds. However, in the theatrical realm, Oriza Hirata and the Robot Theater Project are taking a different take on this modern philosophical inquiry. What is it for humans and androids to coexist and possibly evolve together, and subsequently, what does it mean to be human in a society that contains an equal or superior intellect? Oriza Hirata's career started as a prominent playwright in 1990s Japan with the emergence of Contemporary Colloquial Theater Theory. During his years at International Christian College in Tokyo, Japan, Hirata started the Seinendan Theater Company to investigate his own theories of theatrical writing. In response to the westernization of Japanese drama in the 80s, Hirata wanted to create a new form of playwriting that highlighted the unique grammatical structure and speech patterns of Japanese language. He believed that the plays being performed in Japan caused the performers to put emphasis on certain words and sentences that went against normal every-day speech. -

First Steps One-Way Ticket “Intrigue Theater” “Liberthéâtre” “Tokyo
VIEWPOINT First Steps France, in the late 1980s. A friend “Ame no Nioi” (The Scent of Rain) asks me: “Do you have any plans this weekend?” “No, none in particular.” “I “Liberthéâtre” signed up for a theater workshop, an initi- ation to the Comedia dell’arte. Would you Mozaffar having gone back to London, theater exits my life for a Author Jean-Gabriel Dupuy be interested?” “Well, not really. I’m while until I meet Philippe Mesmer, Tokyo correspondent for the more the music type…” “Come on, just give it a try!” French daily Le Monde. Together, we set up a company called Eventually, I just give in. So here I am, on a Saturday morning, “in “Liberthéâtre” that retains the spirit of Mozaffar’s idea: each actor, the limelight,” so to speak, struggling to improvise a scene imposed whether Japanese, British or Korean, will play in his own language. by the workshop director. She comes up to me and whispers: “Your We fine-tune the process with a supertitle system in Japanese to presence is fine, but you’re not going far enough. Be more daring, try reach a wider audience. This formula allows us to play at the Agora to surprise yourself!” theater, headed by the renowned Oriza Hirata and his company, To dare. To surprise oneself. This pair of keywords opened the “Seinendan” (Youth Troupe). At a pace of one play per year, we suc- gates to theater…and to myself. Because theater is, indeed, a stage cessively present “The Bald Soprano” (Eugène Ionesco), “Antigone” where the tension between dreams and reality becomes “playable.” (Jean Anouilh) and “The Collection” (Harold Pinter). -

Android Science - Toward a New Cross-Interdisciplinary Framework
Android Science - Toward a new cross-interdisciplinary framework - Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University [email protected] 1 Android science Appearance and behavior In the evaluation of interactive robots, the performance measures are sub- jective impression of human subjects who interact with the robot and their unconscious reactions, such as synchronized human behaviors in the interac- tions and eye movements. Obviously, both the appearance and behavior of the robots are important factors in this evaluation. There are many technical reports that compare robots with di®erent behaviors. However nobody has focused on appearance in the previous robotics. There many empirical discussions on very simpli¯ed static robots, say dolls. Designing the robot's appearance, especially to give it a humanoid one, was always a role of the industrial designer. However we con- sider this to be a serious problem for developing and evaluating interactive robots. Appearance and behavior are tightly coupled with both each other and these problems, as the results of evaluation change with appearance. In our previous work, we developed several humanoids for communicating with people [3][4][5], as shown in Figure 1. We empirically know the e®ect of appear- ance is as signi¯cant as behaviors in communication. Human brain functions that recognize people support our empirical knowledge. Android Science To tackle the problem of appearance and behavior, two approaches are nec- essary: one from robotics and the other from cognitive science. The ap- proach from robotics tries to build very humanlike robots based on knowl- edge from cognitive science.