Linux Add-In for Crosscore Embedded Studio
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

CNTR: Lightweight OS Containers
CNTR: Lightweight OS Containers Jorg¨ Thalheim, Pramod Bhatotia Pedro Fonseca Baris Kasikci University of Edinburgh University of Washington University of Michigan Abstract fundamental to achieve high efficiency in virtualized datacenters and enables important use-cases, namely Container-based virtualization has become the de-facto just-in-time deployment of applications. Moreover, standard for deploying applications in data centers. containers significantly reduce operational costs through However, deployed containers frequently include a higher consolidation density and power minimization, wide-range of tools (e.g., debuggers) that are not required especially in multi-tenant environments. Because of all for applications in the common use-case, but they these advantages, it is no surprise that containers have seen are included for rare occasions such as in-production wide-spread adoption by industry, in many cases replacing debugging. As a consequence, containers are significantly altogether traditional virtualization solutions [17]. larger than necessary for the common case, thus increasing the build and deployment time. Despite being lightweight, deployed containers often include a wide-range of tools such as shells, editors, CNTR1 provides the performance benefits of lightweight coreutils, and package managers. These additional tools containers and the functionality of large containers by are usually not required for the application’s core function splitting the traditional container image into two parts: the — the common operational use-case — but they are “fat” image — containing the tools, and the “slim” image included for management, manual inspection, profiling, — containing the main application. At run-time, CNTR and debugging purposes [64]. In practice, this significantly allows the user to efficiently deploy the “slim” image and increases container size and, in turn, translates into then expand it with additional tools, when and if necessary, slower container deployment and inefficient datacenter by dynamically attaching the “fat” image. -

JACSM No 1 2009
STORE: EMBEDDED PERSISTENT STORAGE FOR CLOJURE PROGRAMMING LANGUAGE Konrad Grzanek1 1IT Institute, Academy of Management, Lodz, Poland [email protected] Abstract Functional programming is the most popular declarative style of programming. Its lack of state leads to an increase of programmers' productivity and software robustness. Clojure is a very effective Lisp dialect, but it misses a solid embedded database implementation. A store is a proposed embedded database engine for Clojure that helps to deal with the problem of the inevitable state by mostly functional, minimalistic interface, abandoning SQL and tight integration with Clojure as a sole query and data-processing language. Key words: Functional programming, Lisp, Clojure, embedded database 1 Introduction Functional programming languages and functional programming style in general have been gaining a growing attention in the recent years. Lisp created by John McCarthy and specified in [8] is the oldest functional pro- gramming language. Some of its flavors (dialects, as some say [9]) are still in use today. Common Lisp was the first ANSI standardized Lisp dialect [13] and Common Lisp Object System (CLOS) was probably the first ANSI stan- dardized object oriented programming language [14]. Apart from its outstand- ing features as a Common Lisp subset. Various Lisps were used in artificial intelligence [11] and to some extent the language comes from AI labs and its ecosystem. Common Lisp was used as the language of choice by some AI tutors, like Peter Norvig (in [10]). But the whole family of languages address general problems in computer science, not only these in AI. John Backus argues [3] that the functional style is a real liberation from the traditional imperative languages and their problems. -

Securing Embedded Systems: Analyses of Modern Automotive Systems and Enabling Near-Real Time Dynamic Analysis
Securing Embedded Systems: Analyses of Modern Automotive Systems and Enabling Near-Real Time Dynamic Analysis Karl Koscher A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy University of Washington 2014 Reading Committee: Tadayoshi Kohno, Chair Gaetano Borriello Shwetak Patel Program Authorized to Offer Degree: Computer Science and Engineering © Copyright 2014 Karl Koscher University of Washington Abstract Securing Embedded Systems: From Analyses of Modern Automotive Systems to Enabling Dynamic Analysis Karl Koscher Chair of the Supervisory Committee: Associate Professor Tadayoshi Kohno Department of Computer Science and Engineering Today, our life is pervaded by computer systems embedded inside everyday products. These embedded systems are found in everything from cars to microwave ovens. These systems are becoming increasingly sophisticated and interconnected, both to each other and to the Internet. Unfortunately, it appears that the security implications of this complexity and connectivity have mostly been overlooked, even though ignoring security could have disastrous consequences; since embedded systems control much of our environment, compromised systems could be used to inflict physical harm. This work presents an analysis of security issues in embedded systems, including a comprehensive security analysis of modern automotive systems. We hypothesize that dynamic analysis tools would quickly discover many of the vulnerabilities we found. However, as we will discuss, there -

Sentiment Analysis Using a Novel Human Computation Game
Sentiment Analysis Using a Novel Human Computation Game Claudiu-Cristian Musat THISONE Alireza Ghasemi Boi Faltings Artificial Intelligence Laboratory (LIA) Ecole Polytechnique Fed´ erale´ de Lausanne (EPFL) IN-Ecublens, 1015 Lausanne, Switzerland [email protected] Abstract data is obtained from people using human computa- tion platforms and games. We also prove that the In this paper, we propose a novel human com- method can provide not only labelled texts, but peo- putation game for sentiment analysis. Our ple also help by selecting sentiment-expressing fea- game aims at annotating sentiments of a col- tures that can generalize well. lection of text documents and simultaneously constructing a highly discriminative lexicon of Human computation is a newly emerging positive and negative phrases. paradigm. It tries to solve large-scale problems by Human computation games have been widely utilizing human knowledge and has proven useful used in recent years to acquire human knowl- in solving various problems (Von Ahn and Dabbish, edge and use it to solve problems which are 2004; Von Ahn, 2006; Von Ahn et al., 2006a). infeasible to solve by machine intelligence. To obtain high quality solution from human com- We package the problems of lexicon construc- putation, people should be motivated to make their tion and sentiment detection as a single hu- best effort. One way to incentivize people for sub- man computation game. We compare the re- mitting high-quality results is to package the prob- sults obtained by the game with that of other well-known sentiment detection approaches. lem at hand as a game and request people to play Obtained results are promising and show im- it. -

Root Filesystem
>>> Operating Systems And Applications For Embedded Systems >>> Root Filesystem Name: Mariusz Naumowicz Date: 27 sierpnia 2018 [~]$ _ [1/21] >>> Plan 1. Root Filesystem Useful System Filesystem Hierarchy Standard (FHS) Staging directory 2. Programs The init program Shell Utilities BusyBox ToyBox Libraries Reducing size by stripping Device nodes The proc and sysfs flesystems Mounting flesystems Additional reading Standalone ramdisk Minimizing size Booting with QEMU Additional reading [~]$ _ [2/21] >>> Useful System * init: The program that starts everything off, usually by running a series of scripts. * shell: Needed to give you a command prompt but, more importantly, to run the shell scripts called by init and other programs. * daemons: Various server programs, started by init. * libraries: Usually, the programs mentioned so far are linked with shared libraries which must be present in the root filesystem. * Configuration files: The configuration for init and other daemons is stored in a series of ASCII text files, usually in the /etc directory. * Device nodes: The special files that give access to various device drivers. * /proc and /sys: Two pseudo filesystems that represent kernel data structures as a hierarchy of directories and files. Many programs and library functions read these files. * kernel modules: If you have configured some parts of your kernel to be modules, they will be here, usually in /lib/modules/[kernel version]. [1. Root Filesystem]$ _ [3/21] >>> Filesystem Hierarchy Standard (FHS) * /bin: programs essential for all -

Yocto-Slides.Pdf
Yocto Project and OpenEmbedded Training Yocto Project and OpenEmbedded Training © Copyright 2004-2021, Bootlin. Creative Commons BY-SA 3.0 license. Latest update: October 6, 2021. Document updates and sources: https://bootlin.com/doc/training/yocto Corrections, suggestions, contributions and translations are welcome! embedded Linux and kernel engineering Send them to [email protected] - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 1/296 Rights to copy © Copyright 2004-2021, Bootlin License: Creative Commons Attribution - Share Alike 3.0 https://creativecommons.org/licenses/by-sa/3.0/legalcode You are free: I to copy, distribute, display, and perform the work I to make derivative works I to make commercial use of the work Under the following conditions: I Attribution. You must give the original author credit. I Share Alike. If you alter, transform, or build upon this work, you may distribute the resulting work only under a license identical to this one. I For any reuse or distribution, you must make clear to others the license terms of this work. I Any of these conditions can be waived if you get permission from the copyright holder. Your fair use and other rights are in no way affected by the above. Document sources: https://github.com/bootlin/training-materials/ - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 2/296 Hyperlinks in the document There are many hyperlinks in the document I Regular hyperlinks: https://kernel.org/ I Kernel documentation links: dev-tools/kasan I Links to kernel source files and directories: drivers/input/ include/linux/fb.h I Links to the declarations, definitions and instances of kernel symbols (functions, types, data, structures): platform_get_irq() GFP_KERNEL struct file_operations - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 3/296 Company at a glance I Engineering company created in 2004, named ”Free Electrons” until Feb. -
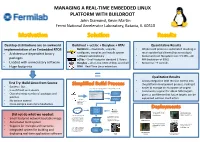
MANAGING a REAL-TIME EMBEDDED LINUX PLATFORM with BUILDROOT John Diamond, Kevin Martin Fermi National Accelerator Laboratory, Batavia, IL 60510
MANAGING A REAL-TIME EMBEDDED LINUX PLATFORM WITH BUILDROOT John Diamond, Kevin Martin Fermi National Accelerator Laboratory, Batavia, IL 60510 Desktop distributions are an awkward Buildroot + ucLibc + Busybox + RTAI Quantitative Results implementation of an Embedded RTOS Buildroot – downloads, unpacks, • Whole build process is automated resulting in • Architecture-dependent binary configures, compiles and installs system much quicker build times (hours not days) software automatically • Kernel and root filesystem size: 3.5 MB – 20 packages uClibc – Small-footprint standard C library MB (reduction of 99%) • Loaded with unnecessary software Busybox – all-in-one UNIX utilities and shell • Boot-time: ~9 seconds • Huge footprints RTAI – Real-Time Linux extensions = Qualitative Results • Allows integration with revision control into First Try: Build Linux from Source the platform development process, making it • Success! But.. 2. Buildroot’s menuconfig generates a package configuration file easier to manage an ecosystem of targets • Is as difficult as it sounds and kernel configuration file • Community support for x86 & ARM targets Linux Kernel • Overwhelming number of packages and Configuration gives us confidence that future targets can be patches Package supported without much effort 1. Developer Configuration • No version control configures build via Buildroot’s • Cross-compile even more headaches menuconfig Internet Build Process Power Supply Control Quench Protection Git / CVS / SVN and Regulation for the System for Tevatron Did not do what we needed: Fermilab Linac Electron Lens (TEL II) 3. The build process pulls 4. The output from the software packages from build process is a kernel • Small-footprint network bootable image the internet and custom bzImage bzImage file with an softare packages from a integrated root filesystem ARM Cortex A-9 source code repository file PC/104 AMD • Automated build system Geode SBC Beam Position Monitor Power Supply Control prototype for Fermilab and Regulation for • Support for multiple architectures 5. -

Cross-Compiler Bipartite Vulnerability Search
electronics Article Cross-Compiler Bipartite Vulnerability Search Paul Black * and Iqbal Gondal Internet Commerce Security Laboratory (ICSL), Federation University, Ballarat 3353, Australia; [email protected] * Correspondence: [email protected] Abstract: Open-source libraries are widely used in software development, and the functions from these libraries may contain security vulnerabilities that can provide gateways for attackers. This paper provides a function similarity technique to identify vulnerable functions in compiled programs and proposes a new technique called Cross-Compiler Bipartite Vulnerability Search (CCBVS). CCBVS uses a novel training process, and bipartite matching to filter SVM model false positives to improve the quality of similar function identification. This research uses debug symbols in programs compiled from open-source software products to generate the ground truth. This automatic extraction of ground truth allows experimentation with a wide range of programs. The results presented in the paper show that an SVM model trained on a wide variety of programs compiled for Windows and Linux, x86 and Intel 64 architectures can be used to predict function similarity and that the use of bipartite matching substantially improves the function similarity matching performance. Keywords: malware similarity; function similarity; binary similarity; machine-learning; bipar- tite matching 1. Introduction Citation: Black, P.; Gondal, I. Cross-Compiler Bipartite Function similarity techniques are used in the following activities, the triage of mal- Vulnerability Search. Electronics 2021, ware [1], analysis of program patches [2], identification of library functions [3], analysis of 10, 1356. https://doi.org/10.3390/ code authorship [4], the identification of similar function pairs to reduce manual analysis electronics10111356 workload, [5], plagiarism analysis [6], and for vulnerable function identification [7–9]. -

October 2011 Vol
NoSQL GREG BURD Hypervisors and Virtual Machines: Implementation Insights on the x86 Architecture DON REVELLE Conference Reports from the 2011 USENIX Annual Technical Conference, HotPar, and more OCTOBER 2011 VOL. 36, NO. 5 THE ADVANCED COMPUTING SYSTEMS ASSOCIATION THE ADVANCED COMPUTING SYSTEMS ASSOCIATION usenix_login_oct11_covers.indd 1 9.9.11 5:55 PM UPCOMING EVENTS 23rd ACM Symposium on Operating Systems 9th USENIX Symposium on Networked Systems Principles (SOSP 2011) Design and Implementation (NSDI ’12) SPONSORED BY ACM SIGOPS IN COOPERATION WITH USENIX SPONSORED BY USENIX IN COOPERATION WITH ACM SIGCOMM AND ACM SIGOPS October 23–26, 2011, Cascais, Portugal April 25–27, 2012, San Jose, CA http://sosp2011.gsd.inesc-id.pt http://www.usenix.org/nsdi12 ACM Symposium on Computer Human Interac- tion for Management of Information Technology 2012 USENIX Federated Conferences Week (CHIMIT 2011) June 12–15, 2012, Boston, MA, USA http://www.usenix.org/fcw12 SPONSORED BY ACM IN ASSOCIATION WITH USENIX December 4–5, 2011, Boston, MA 2012 USENIX Annual Technical Conference http://chimit.acm.org/ (USENIX ATC ’12) June 13–15, 2012, Boston, MA 25th Large Installation System Administration http://www.usenix.org/atc12 Conference (LISA ’11) Paper titles and abstracts due January 10, 2012 SPONSORED BY USENIX IN COOPERATION WITH LOPSA December 4–9, 2011, Boston, MA 21st USENIX Security Symposium http://www.usenix.org/lisa11 (USENIX Security ’12) August 6–10, 2012, Bellevue, WA ACM/IFIP/USENIX 12th International Middleware Conference (Middleware 2011) -

A Variability-Aware Module System
A Variability-Aware Module System Christian Kästner, Klaus Ostermann, and Sebastian Erdweg Philipps University Marburg, Germany Module systems enable a divide and conquer strategy to software develop- ment. To implement compile-time variability in software product lines, mod- ules can be composed in different combinations. However, this way variability dictates a dominant decomposition. Instead, we introduce a variability-aware module system that supports compile-time variability inside a module and its interface. This way, each module can be considered a product line that can be type checked in isolation. Variability can crosscut multiple modules. The module system breaks with the antimodular tradition of a global variabil- ity model in product-line development and provides a path toward software ecosystems and product lines of product lines developed in an open fashion. We discuss the design and implementation of such a module system on a core calculus and provide an implementation for C, which we use to type check the open source product line Busybox with 811 compile-time options. 1 Introduction A module system allows developers to decompose a large system into manageable sub- systems, which can be developed and checked in isolation [13]. A module hides informa- tion about internal implementations and exports only a well-defined and often machine- enforced interface. This enables an open-world development style, in which software can be composed from modular self-contained parts. The need for compile-time variability, for example in software product lines [6, 17, 10], challenges existing module systems. To tailor a software system, stakeholders may want to select from compile-time configuration options (or features) and derive a specific configuration (or variant, or product) of the system. -

Operating System Components for an Embedded Linux System
INSTITUTEFORREAL-TIMECOMPUTERSYSTEMS TECHNISCHEUNIVERSITATM¨ UNCHEN¨ PROFESSOR G. F ARBER¨ Operating System Components for an Embedded Linux System Martin Hintermann Studienarbeit ii Operating System Components for an Embedded Linux System Studienarbeit Executed at the Institute for Real-Time Computer Systems Technische Universitat¨ Munchen¨ Prof. Dr.-Ing. Georg Farber¨ Advisor: Prof.Dr.rer.nat.habil. Thomas Braunl¨ Author: Martin Hintermann Kirchberg 34 82069 Hohenschaftlarn¨ Submitted in February 2007 iii Acknowledgements At first, i would like to thank my supervisor Prof. Dr. Thomas Braunl¨ for giving me the opportunity to take part at a really interesting project. Many thanks to Thomas Sommer, my project partner, for his contribution to our good work. I also want to thank also Bernard Blackham for his assistance by email and phone at any time. In my opinion, it was a great cooperation of all persons taking part in this project. Abstract Embedded systems can be found in more and more devices. Linux as a free operating system is also becoming more and more important in embedded applications. Linux even replaces other operating systems in certain areas (e.g. mobile phones). This thesis deals with the employment of Linux in embedded systems. Various architectures of embedded systems are introduced and the characteristics of common operating systems for these devices are reviewed. The architecture of Linux is examined by looking at the particular components such as kernel, standard C libraries and POSIX tools for embedded systems. Furthermore, there is a survey of real-time extensions for the Linux kernel. The thesis also treats software development for embedded Linux ranging from the prerequi- sites for compiling software to the debugging of binaries. -

C:\Andrzej\PDF\ABC Nagrywania P³yt CD\1 Strona.Cdr
IDZ DO PRZYK£ADOWY ROZDZIA£ SPIS TREFCI Wielka encyklopedia komputerów KATALOG KSI¥¯EK Autor: Alan Freedman KATALOG ONLINE T³umaczenie: Micha³ Dadan, Pawe³ Gonera, Pawe³ Koronkiewicz, Rados³aw Meryk, Piotr Pilch ZAMÓW DRUKOWANY KATALOG ISBN: 83-7361-136-3 Tytu³ orygina³u: ComputerDesktop Encyclopedia Format: B5, stron: 1118 TWÓJ KOSZYK DODAJ DO KOSZYKA Wspó³czesna informatyka to nie tylko komputery i oprogramowanie. To setki technologii, narzêdzi i urz¹dzeñ umo¿liwiaj¹cych wykorzystywanie komputerów CENNIK I INFORMACJE w ró¿nych dziedzinach ¿ycia, jak: poligrafia, projektowanie, tworzenie aplikacji, sieci komputerowe, gry, kinowe efekty specjalne i wiele innych. Rozwój technologii ZAMÓW INFORMACJE komputerowych, trwaj¹cy stosunkowo krótko, wniós³ do naszego ¿ycia wiele nowych O NOWOFCIACH mo¿liwoYci. „Wielka encyklopedia komputerów” to kompletne kompendium wiedzy na temat ZAMÓW CENNIK wspó³czesnej informatyki. Jest lektur¹ obowi¹zkow¹ dla ka¿dego, kto chce rozumieæ dynamiczny rozwój elektroniki i technologii informatycznych. Opisuje wszystkie zagadnienia zwi¹zane ze wspó³czesn¹ informatyk¹; przedstawia zarówno jej historiê, CZYTELNIA jak i trendy rozwoju. Zawiera informacje o firmach, których produkty zrewolucjonizowa³y FRAGMENTY KSI¥¯EK ONLINE wspó³czesny Ywiat, oraz opisy technologii, sprzêtu i oprogramowania. Ka¿dy, niezale¿nie od stopnia zaawansowania swojej wiedzy, znajdzie w niej wyczerpuj¹ce wyjaYnienia interesuj¹cych go terminów z ró¿nych bran¿ dzisiejszej informatyki. • Komunikacja pomiêdzy systemami informatycznymi i sieci komputerowe • Grafika komputerowa i technologie multimedialne • Internet, WWW, poczta elektroniczna, grupy dyskusyjne • Komputery osobiste — PC i Macintosh • Komputery typu mainframe i stacje robocze • Tworzenie oprogramowania i systemów komputerowych • Poligrafia i reklama • Komputerowe wspomaganie projektowania • Wirusy komputerowe Wydawnictwo Helion JeYli szukasz ]ród³a informacji o technologiach informatycznych, chcesz poznaæ ul.