Root Filesystem
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Webinar PPT/Slides
3/16/2021 Child Trauma, Parenting, & Challenging Behaviors Melissa Bernstein, PhD 1 The impact of trauma on parenting Functional Assessment- what’s going on?! Overview The importance of relationships Strategies to shape behavior 2 THE IMPACT OF TRAUMA ON PARENTING 3 1 3/16/2021 BEHAVIOR PROBLEMS AND CHILDREN What are the most disruptive child behaviors? 4 What Does Ideal Parenting Look Like? Nurturing Appropriate Interactions Limits 5 What Can Happen to Balance after Trauma? High Nurturing Low Limits 6 2 3/16/2021 What Can Happen to Balance after Trauma? High Limits Low Nurturing 7 THE IMPORTANCE OF ASSESSMENT IN MANAGING CHALLENGING BEHAVIOR 8 • The body’s ‘alarm’ system is broken after a trauma Trauma Reactions • The body responds in one of three ways to promote and Misbehavior ‘survival’ • This makes it harder for children to regulate their behavior FightFlight Freeze 9 3 3/16/2021 Clues That a Child is Stuck in Fight/Flight/Freeze • Extreme emotions • Behavior feels like its out of the blue • Big response over very minor issue • Happens quickly (0 to 60) • Child is unable to calm down • Doesn’t respond to reasoning • Distress may last a long time • Apologetic later 10 What is the function of this behavior? 11 Applying Skills to Trauma Reactions Create Reflect Offer Allow Create a Briefly reflect Offer to do a Allow child sense of emotion favorite time to calm safety • Tell child you can coping skill • This means back • Stand a few feet see he/she/they together away and be away from child is feeling upset quiet! Less and you are • -

Cisco Telepresence TC Software Licensing Information (TC4.1)
Cisco TelePresence TC Software License information guide TC Software FEBRUARY 2011 Legal information and third party copyright and licenses For Cisco TelePresence products using TC software D14767.02 License Information for products using TC Software, TC4 February 2011. 1 © 2010-2011 Cisco Systems, Inc. All rights reserved. www.cisco.com Cisco TelePresence TC Software License information guide ipcalc-1.3, ipcalc-license ...................................................................................... 16 TA - ToC - Hidden Table of Contents iproute-2.6.26, GPLv2 .......................................................................................16 What’stext anchor in iptables-1.4.28, GPLv2......................................................................................16 About this guide ..............................................................................................................4 iputils-s20071127, iputils-bsd-license .................................................... 16 The products covered by this guide: .....................................................4 jpeg lib, jpeg-license ................................................................................................ 17 this guide? User documentation .............................................................................................4 Kmod-*, GPLv2 ........................................................................................................19 Software download ................................................................................................4 -

OSS Disclosure
Tape Automation Scalar i500, Firmware Release I8.2.2 (645G) Open Source Software Licenses Open Source Software (OSS) Licenses for: Scalar i500 Firmware Release I8.2.2 (645G). The firmware/software contained in the Scalar i500 is an aggregate of vendor proprietary pro- grams as well as third party programs, including Open Source Software (OSS). Use of OSS is subject to designated license terms and the following OSS license disclosure lists all open source components and applicable licenses that are part of the tape library firmware. All software that is designated as OSS may be copied, distributed, and/or modified in accordance with the terms and conditions of its respective license(s). Additionally, for some OSS you are entitled to obtain the corresponding OSS source files as required by the respective and applicable license terms. While GNU General Public License ("GPL") and GNU Lesser General Public Li- cense ("LGPL") licensed OSS requires that the sources be made available, Quantum makes all tape library firmware integrated OSS source files, whether licensed as GPL, LGPL or otherwise, available upon request. Please refer to the Scalar i500 Open Source License CD (part number 3- 03679-xx) when making such request. For contact information, see Getting More Information. LTO tape drives installed in the library may also include OSS components. For a complete list- ing of respective OSS packages and applicable OSS license information included in LTO tape drives, as well as instructions to obtain source files pursuant to applicable license requirements, please reference the Tape Automation disclosure listings under the Open Source Information link at www.quantum.com/support. -

CNTR: Lightweight OS Containers
CNTR: Lightweight OS Containers Jorg¨ Thalheim, Pramod Bhatotia Pedro Fonseca Baris Kasikci University of Edinburgh University of Washington University of Michigan Abstract fundamental to achieve high efficiency in virtualized datacenters and enables important use-cases, namely Container-based virtualization has become the de-facto just-in-time deployment of applications. Moreover, standard for deploying applications in data centers. containers significantly reduce operational costs through However, deployed containers frequently include a higher consolidation density and power minimization, wide-range of tools (e.g., debuggers) that are not required especially in multi-tenant environments. Because of all for applications in the common use-case, but they these advantages, it is no surprise that containers have seen are included for rare occasions such as in-production wide-spread adoption by industry, in many cases replacing debugging. As a consequence, containers are significantly altogether traditional virtualization solutions [17]. larger than necessary for the common case, thus increasing the build and deployment time. Despite being lightweight, deployed containers often include a wide-range of tools such as shells, editors, CNTR1 provides the performance benefits of lightweight coreutils, and package managers. These additional tools containers and the functionality of large containers by are usually not required for the application’s core function splitting the traditional container image into two parts: the — the common operational use-case — but they are “fat” image — containing the tools, and the “slim” image included for management, manual inspection, profiling, — containing the main application. At run-time, CNTR and debugging purposes [64]. In practice, this significantly allows the user to efficiently deploy the “slim” image and increases container size and, in turn, translates into then expand it with additional tools, when and if necessary, slower container deployment and inefficient datacenter by dynamically attaching the “fat” image. -

Reference Manual GUI Graphical User Interface EAGLE One Rel. 5.3
Reference Manual GUI Graphical User Interface Industrial Ethernet Firewall EAGLE One RM GUI EAGLE One Technical Support Release 5.3.0 09/2013 https://hirschmann-support.belden.eu.com The naming of copyrighted trademarks in this manual, even when not specially indicated, should not be taken to mean that these names may be considered as free in the sense of the trademark and tradename protection law and hence that they may be freely used by anyone. © 2013 Hirschmann Automation and Control GmbH Manuals and software are protected by copyright. All rights reserved. The copying, reproduction, translation, conversion into any electronic medium or machine scannable form is not permitted, either in whole or in part. An exception is the preparation of a backup copy of the software for your own use. For devices with embedded software, the end-user license agreement on the enclosed CD/DVD applies. The performance features described here are binding only if they have been expressly agreed when the contract was made. This document was produced by Hirschmann Automation and Control GmbH according to the best of the company's knowledge. Hirschmann reserves the right to change the contents of this document without prior notice. Hirschmann can give no guarantee in respect of the correctness or accuracy of the information in this document. Hirschmann can accept no responsibility for damages, resulting from the use of the network components or the associated operating software. In addition, we refer to the conditions of use specified in the license contract. You can get the latest version of this manual on the Internet at the Hirschmann product site (www.hirschmann.com). -

Securing Embedded Systems: Analyses of Modern Automotive Systems and Enabling Near-Real Time Dynamic Analysis
Securing Embedded Systems: Analyses of Modern Automotive Systems and Enabling Near-Real Time Dynamic Analysis Karl Koscher A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy University of Washington 2014 Reading Committee: Tadayoshi Kohno, Chair Gaetano Borriello Shwetak Patel Program Authorized to Offer Degree: Computer Science and Engineering © Copyright 2014 Karl Koscher University of Washington Abstract Securing Embedded Systems: From Analyses of Modern Automotive Systems to Enabling Dynamic Analysis Karl Koscher Chair of the Supervisory Committee: Associate Professor Tadayoshi Kohno Department of Computer Science and Engineering Today, our life is pervaded by computer systems embedded inside everyday products. These embedded systems are found in everything from cars to microwave ovens. These systems are becoming increasingly sophisticated and interconnected, both to each other and to the Internet. Unfortunately, it appears that the security implications of this complexity and connectivity have mostly been overlooked, even though ignoring security could have disastrous consequences; since embedded systems control much of our environment, compromised systems could be used to inflict physical harm. This work presents an analysis of security issues in embedded systems, including a comprehensive security analysis of modern automotive systems. We hypothesize that dynamic analysis tools would quickly discover many of the vulnerabilities we found. However, as we will discuss, there -

Yocto-Slides.Pdf
Yocto Project and OpenEmbedded Training Yocto Project and OpenEmbedded Training © Copyright 2004-2021, Bootlin. Creative Commons BY-SA 3.0 license. Latest update: October 6, 2021. Document updates and sources: https://bootlin.com/doc/training/yocto Corrections, suggestions, contributions and translations are welcome! embedded Linux and kernel engineering Send them to [email protected] - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 1/296 Rights to copy © Copyright 2004-2021, Bootlin License: Creative Commons Attribution - Share Alike 3.0 https://creativecommons.org/licenses/by-sa/3.0/legalcode You are free: I to copy, distribute, display, and perform the work I to make derivative works I to make commercial use of the work Under the following conditions: I Attribution. You must give the original author credit. I Share Alike. If you alter, transform, or build upon this work, you may distribute the resulting work only under a license identical to this one. I For any reuse or distribution, you must make clear to others the license terms of this work. I Any of these conditions can be waived if you get permission from the copyright holder. Your fair use and other rights are in no way affected by the above. Document sources: https://github.com/bootlin/training-materials/ - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 2/296 Hyperlinks in the document There are many hyperlinks in the document I Regular hyperlinks: https://kernel.org/ I Kernel documentation links: dev-tools/kasan I Links to kernel source files and directories: drivers/input/ include/linux/fb.h I Links to the declarations, definitions and instances of kernel symbols (functions, types, data, structures): platform_get_irq() GFP_KERNEL struct file_operations - Kernel, drivers and embedded Linux - Development, consulting, training and support - https://bootlin.com 3/296 Company at a glance I Engineering company created in 2004, named ”Free Electrons” until Feb. -
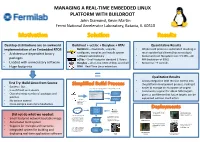
MANAGING a REAL-TIME EMBEDDED LINUX PLATFORM with BUILDROOT John Diamond, Kevin Martin Fermi National Accelerator Laboratory, Batavia, IL 60510
MANAGING A REAL-TIME EMBEDDED LINUX PLATFORM WITH BUILDROOT John Diamond, Kevin Martin Fermi National Accelerator Laboratory, Batavia, IL 60510 Desktop distributions are an awkward Buildroot + ucLibc + Busybox + RTAI Quantitative Results implementation of an Embedded RTOS Buildroot – downloads, unpacks, • Whole build process is automated resulting in • Architecture-dependent binary configures, compiles and installs system much quicker build times (hours not days) software automatically • Kernel and root filesystem size: 3.5 MB – 20 packages uClibc – Small-footprint standard C library MB (reduction of 99%) • Loaded with unnecessary software Busybox – all-in-one UNIX utilities and shell • Boot-time: ~9 seconds • Huge footprints RTAI – Real-Time Linux extensions = Qualitative Results • Allows integration with revision control into First Try: Build Linux from Source the platform development process, making it • Success! But.. 2. Buildroot’s menuconfig generates a package configuration file easier to manage an ecosystem of targets • Is as difficult as it sounds and kernel configuration file • Community support for x86 & ARM targets Linux Kernel • Overwhelming number of packages and Configuration gives us confidence that future targets can be patches Package supported without much effort 1. Developer Configuration • No version control configures build via Buildroot’s • Cross-compile even more headaches menuconfig Internet Build Process Power Supply Control Quench Protection Git / CVS / SVN and Regulation for the System for Tevatron Did not do what we needed: Fermilab Linac Electron Lens (TEL II) 3. The build process pulls 4. The output from the software packages from build process is a kernel • Small-footprint network bootable image the internet and custom bzImage bzImage file with an softare packages from a integrated root filesystem ARM Cortex A-9 source code repository file PC/104 AMD • Automated build system Geode SBC Beam Position Monitor Power Supply Control prototype for Fermilab and Regulation for • Support for multiple architectures 5. -

Cross-Compiler Bipartite Vulnerability Search
electronics Article Cross-Compiler Bipartite Vulnerability Search Paul Black * and Iqbal Gondal Internet Commerce Security Laboratory (ICSL), Federation University, Ballarat 3353, Australia; [email protected] * Correspondence: [email protected] Abstract: Open-source libraries are widely used in software development, and the functions from these libraries may contain security vulnerabilities that can provide gateways for attackers. This paper provides a function similarity technique to identify vulnerable functions in compiled programs and proposes a new technique called Cross-Compiler Bipartite Vulnerability Search (CCBVS). CCBVS uses a novel training process, and bipartite matching to filter SVM model false positives to improve the quality of similar function identification. This research uses debug symbols in programs compiled from open-source software products to generate the ground truth. This automatic extraction of ground truth allows experimentation with a wide range of programs. The results presented in the paper show that an SVM model trained on a wide variety of programs compiled for Windows and Linux, x86 and Intel 64 architectures can be used to predict function similarity and that the use of bipartite matching substantially improves the function similarity matching performance. Keywords: malware similarity; function similarity; binary similarity; machine-learning; bipar- tite matching 1. Introduction Citation: Black, P.; Gondal, I. Cross-Compiler Bipartite Function similarity techniques are used in the following activities, the triage of mal- Vulnerability Search. Electronics 2021, ware [1], analysis of program patches [2], identification of library functions [3], analysis of 10, 1356. https://doi.org/10.3390/ code authorship [4], the identification of similar function pairs to reduce manual analysis electronics10111356 workload, [5], plagiarism analysis [6], and for vulnerable function identification [7–9]. -

Operating System Components for an Embedded Linux System
INSTITUTEFORREAL-TIMECOMPUTERSYSTEMS TECHNISCHEUNIVERSITATM¨ UNCHEN¨ PROFESSOR G. F ARBER¨ Operating System Components for an Embedded Linux System Martin Hintermann Studienarbeit ii Operating System Components for an Embedded Linux System Studienarbeit Executed at the Institute for Real-Time Computer Systems Technische Universitat¨ Munchen¨ Prof. Dr.-Ing. Georg Farber¨ Advisor: Prof.Dr.rer.nat.habil. Thomas Braunl¨ Author: Martin Hintermann Kirchberg 34 82069 Hohenschaftlarn¨ Submitted in February 2007 iii Acknowledgements At first, i would like to thank my supervisor Prof. Dr. Thomas Braunl¨ for giving me the opportunity to take part at a really interesting project. Many thanks to Thomas Sommer, my project partner, for his contribution to our good work. I also want to thank also Bernard Blackham for his assistance by email and phone at any time. In my opinion, it was a great cooperation of all persons taking part in this project. Abstract Embedded systems can be found in more and more devices. Linux as a free operating system is also becoming more and more important in embedded applications. Linux even replaces other operating systems in certain areas (e.g. mobile phones). This thesis deals with the employment of Linux in embedded systems. Various architectures of embedded systems are introduced and the characteristics of common operating systems for these devices are reviewed. The architecture of Linux is examined by looking at the particular components such as kernel, standard C libraries and POSIX tools for embedded systems. Furthermore, there is a survey of real-time extensions for the Linux kernel. The thesis also treats software development for embedded Linux ranging from the prerequi- sites for compiling software to the debugging of binaries. -

Examining Social Cohesion and Social Inclusion Strategies to Prevent Sexual and Domes&C Violence
Welcome, This Web Conference Will Begin Soon What about Power and Patriarchy? Examining Social Cohesion and Social Inclusion Strategies to Prevent Sexual and Domesc Violence PreventConnect Website: preventconnect.org 1215 K Street Email: [email protected] Suite 1850 Email Group: Sacramento CA preventconnect.org/email-group 95814 eLearning: learn.preventconnect.org Wiki: wiki.preventconnect.org preventconnect.org/Facebook preventconnect.org/YouTube preventconnect.org/Twier preventconnect.org/LinkedIn preventconnect.org/Flickr preventconnect.org/Pinterest How to use this technology • Raise hand • Text chat & private chat • PowerPoint slides • Polling quesBons • Phone • Closed capBoning • Web conference guidelines Please send a private chat message for help. Call iLinc Technical Support at 800.799.4510. PreventConnect • DomesBc violence/inBmate partner violence • Sexual violence • Violence across the lifespan • Prevent before violence starts • Connect to other forms of violence & oppression • Connect to other prevenBon pracBBoners Beyond Partnerships: Shared Linkages for PrevenBon February 3: From Foundaons to the Future: A prevenBon approach to sexual and domesBc violence March 9:Harmful Gender Norms: How can we build alliances with queer (LGBTQ) movements to help prevent sexual and domesBc violence? March 23:Harmful Gender Norms: Moving beyond binary and heteronormave approaches to prevenBng sexual and domesBc violence May 4: Shared Roots: Sexual and domesBc violence prevenBon strategies in support of social jusBce June 8: Engaging -

Run Ds Homebrew Through Ds Download Play Pc How to Homebrew a Nintendo 3DS/2DS
run ds homebrew through ds download play pc How to Homebrew a Nintendo 3DS/2DS. Homebrewing is the process of using various exploits to allow your device to run custom software, this can include games, emulators, and various tools. There are a wide variety of ways to homebrew your 3DS, but for this Instructable we will be using Browserhax, an exploit using the Nintendo 3DS's internet browser. This is a fairly simple and quick process that just about anyone can accomplish that works on all versions of the 3DS, including the 2DS. Step 1: Determine If Your 3DS Is Capable of Being Homebrewed. The firmware is the operating system that the 3DS runs on. Firmware is updated as time goes on just like any major product, with higher numbers being newer versions. The firmware version of your 3DS can easily be determined by selecting the System Settings icon and checking the bottom- right corner of the top screen. Currently in order to use Browserhax your firmware must be lower than 10.3.0-28. However, starting with version 9.9 the firmware will check if the system is up to date, and if not, refuse to allow you to use the browser. If you see the nag message you will not be able to use Browserhax, but it is possible to circumvent the nag message by performing the following steps: 1.Go to System Settings and change the date to January 1, 2000, 00:00. 2.Use the browser 'Initialize save data' option, before any page gets loaded triggering the browser version message.(Note that you can't press the HOME button to return from the browser, otherwise you will have to re-initialize the save data again.