Sieve Algorithms for the Discrete Logarithm in Medium Characteristic Finite Fields Laurent Grémy
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Quadratic Sieve - Introduction to Theory with Regard to Implementation Issues
The Quadratic Sieve - introduction to theory with regard to implementation issues RNDr. Marian Kechlibar, Ph.D. April 15, 2005 Contents I The Quadratic Sieve 3 1 Introduction 4 1.1 The Quadratic Sieve - short description . 5 1.1.1 Polynomials and relations . 5 1.1.2 Smooth and partial relations . 7 1.1.3 The Double Large Prime Variation . 8 1.1.4 Problems to solve . 10 2 Quadratic Sieve Implementation 12 2.1 The Factor Base . 12 2.2 The sieving process . 15 2.2.1 Interval sieving and solution of polynomials . 16 2.2.2 Practical implementation . 16 2.3 Generation of polynomials . 17 2.3.1 Desirable properties of polynomials . 17 2.3.2 Assessment of magnitude of coecients . 18 2.3.3 MPQS - The Silverman Method . 20 2.3.4 SIQS principle . 21 2.3.5 Desirable properties of b . 22 2.3.6 SIQS - Generation of the Bi's . 23 2.3.7 Generation of b with Gray code formulas . 24 2.3.8 SIQS - General remarks on a determination . 26 2.3.9 SIQS - The bit method for a coecient . 27 2.3.10 SIQS - The Carrier-Wagsta method for a coecient . 28 2.4 Combination of the relations, partial relations and linear algebra 30 2.5 Linear algebra step . 31 2.6 The Singleton Gap . 32 1 3 Experimental Results 36 3.1 Sieving speed - dependence on FB size . 36 3.2 Sieving speed - dependence on usage of 1-partials . 38 3.3 Singletons - dependence on log(N) and FB size . 39 3.4 Properties of the sieving matrices . -

A Public-Key Cryptosystem Based on Discrete Logarithm Problem Over Finite Fields 퐅퐩퐧
IOSR Journal of Mathematics (IOSR-JM) e-ISSN: 2278-5728, p-ISSN: 2319-765X. Volume 11, Issue 1 Ver. III (Jan - Feb. 2015), PP 01-03 www.iosrjournals.org A Public-Key Cryptosystem Based On Discrete Logarithm Problem over Finite Fields 퐅퐩퐧 Saju M I1, Lilly P L2 1Assistant Professor, Department of Mathematics, St. Thomas’ College, Thrissur, India 2Associate professor, Department of Mathematics, St. Joseph’s College, Irinjalakuda, India Abstract: One of the classical problems in mathematics is the Discrete Logarithm Problem (DLP).The difficulty and complexity for solving DLP is used in most of the cryptosystems. In this paper we design a public key system based on the ring of polynomials over the field 퐹푝 is developed. The security of the system is based on the difficulty of finding discrete logarithms over the function field 퐹푝푛 with suitable prime p and sufficiently large n. The presented system has all features of ordinary public key cryptosystem. Keywords: Discrete logarithm problem, Function Field, Polynomials over finite fields, Primitive polynomial, Public key cryptosystem. I. Introduction For the construction of a public key cryptosystem, we need a finite extension field Fpn overFp. In our paper [1] we design a public key cryptosystem based on discrete logarithm problem over the field F2. Here, for increasing the complexity and difficulty for solving DLP, we made a proper additional modification in the system. A cryptosystem for message transmission means a map from units of ordinary text called plaintext message units to units of coded text called cipher text message units. The face of cryptography was radically altered when Diffie and Hellman invented an entirely new type of cryptography, called public key [Diffie and Hellman 1976][2]. -
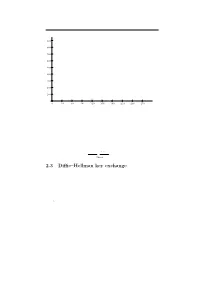
2.3 Diffie–Hellman Key Exchange
2.3. Di±e{Hellman key exchange 65 q q q q q q 6 q qq q q q q q q 900 q q q q q q q qq q q q q q q q q q q q q q q q q 800 q q q qq q q q q q q q q q qq q q q q q q q q q q q 700 q q q q q q q q q q q q q q q q q q q q q q q q q q qq q 600 q q q q q q q q q q q q qq q q q q q q q q q q q q q q q q q qq q q q q q q q q 500 q qq q q q q q qq q q q q q qqq q q q q q q q q q q q q q qq q q q 400 q q q q q q q q q q q q q q q q q q q q q q q q q 300 q q q q q q q q q q q q q q q q q q qqqq qqq q q q q q q q q q q q 200 q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q q qq q q qq q q 100 q q q q q q q q q q q q q q q q q q q q q q q q q 0 q - 0 30 60 90 120 150 180 210 240 270 Figure 2.2: Powers 627i mod 941 for i = 1; 2; 3;::: any group and use the group law instead of multiplication. -

Making NTRU As Secure As Worst-Case Problems Over Ideal Lattices
Making NTRU as Secure as Worst-Case Problems over Ideal Lattices Damien Stehlé1 and Ron Steinfeld2 1 CNRS, Laboratoire LIP (U. Lyon, CNRS, ENS Lyon, INRIA, UCBL), 46 Allée d’Italie, 69364 Lyon Cedex 07, France. [email protected] – http://perso.ens-lyon.fr/damien.stehle 2 Centre for Advanced Computing - Algorithms and Cryptography, Department of Computing, Macquarie University, NSW 2109, Australia [email protected] – http://web.science.mq.edu.au/~rons Abstract. NTRUEncrypt, proposed in 1996 by Hoffstein, Pipher and Sil- verman, is the fastest known lattice-based encryption scheme. Its mod- erate key-sizes, excellent asymptotic performance and conjectured resis- tance to quantum computers could make it a desirable alternative to fac- torisation and discrete-log based encryption schemes. However, since its introduction, doubts have regularly arisen on its security. In the present work, we show how to modify NTRUEncrypt to make it provably secure in the standard model, under the assumed quantum hardness of standard worst-case lattice problems, restricted to a family of lattices related to some cyclotomic fields. Our main contribution is to show that if the se- cret key polynomials are selected by rejection from discrete Gaussians, then the public key, which is their ratio, is statistically indistinguishable from uniform over its domain. The security then follows from the already proven hardness of the R-LWE problem. Keywords. Lattice-based cryptography, NTRU, provable security. 1 Introduction NTRUEncrypt, devised by Hoffstein, Pipher and Silverman, was first presented at the Crypto’96 rump session [14]. Although its description relies on arithmetic n over the polynomial ring Zq[x]=(x − 1) for n prime and q a small integer, it was quickly observed that breaking it could be expressed as a problem over Euclidean lattices [6]. -

The Discrete Log Problem and Elliptic Curve Cryptography
THE DISCRETE LOG PROBLEM AND ELLIPTIC CURVE CRYPTOGRAPHY NOLAN WINKLER Abstract. In this paper, discrete log-based public-key cryptography is ex- plored. Specifically, we first examine the Discrete Log Problem over a general cyclic group and algorithms that attempt to solve it. This leads us to an in- vestigation of the security of cryptosystems based over certain specific cyclic × groups: Fp, Fp , and the cyclic subgroup generated by a point on an elliptic curve; we ultimately see the highest security comes from using E(Fp) as our group. This necessitates an introduction of elliptic curves, which is provided. Finally, we conclude with cryptographic implementation considerations. Contents 1. Introduction 2 2. Public-Key Systems Over a Cyclic Group G 3 2.1. ElGamal Messaging 3 2.2. Diffie-Hellman Key Exchanges 4 3. Security & Hardness of the Discrete Log Problem 4 4. Algorithms for Solving the Discrete Log Problem 6 4.1. General Cyclic Groups 6 × 4.2. The cyclic group Fp 9 4.3. Subgroup Generated by a Point on an Elliptic Curve 10 5. Elliptic Curves: A Better Group for Cryptography 11 5.1. Basic Theory and Group Law 11 5.2. Finding the Order 12 6. Ensuring Security 15 6.1. Special Cases and Notes 15 7. Further Reading 15 8. Acknowledgments 15 References 16 1 2 NOLAN WINKLER 1. Introduction In this paper, basic knowledge of number theory and abstract algebra is assumed. Additionally, rather than beginning from classical symmetric systems of cryptog- raphy, such as the famous Caesar or Vigni`ere ciphers, we assume a familiarity with these systems and why they have largely become obsolete on their own. -

The Quadratic Sieve Factoring Algorithm
The Quadratic Sieve Factoring Algorithm Eric Landquist MATH 488: Cryptographic Algorithms December 14, 2001 1 1 Introduction Mathematicians have been attempting to find better and faster ways to fac- tor composite numbers since the beginning of time. Initially this involved dividing a number by larger and larger primes until you had the factoriza- tion. This trial division was not improved upon until Fermat applied the factorization of the difference of two squares: a2 b2 = (a b)(a + b). In his method, we begin with the number to be factored:− n. We− find the smallest square larger than n, and test to see if the difference is square. If so, then we can apply the trick of factoring the difference of two squares to find the factors of n. If the difference is not a perfect square, then we find the next largest square, and repeat the process. While Fermat's method is much faster than trial division, when it comes to the real world of factoring, for example factoring an RSA modulus several hundred digits long, the purely iterative method of Fermat is too slow. Sev- eral other methods have been presented, such as the Elliptic Curve Method discovered by H. Lenstra in 1987 and a pair of probabilistic methods by Pollard in the mid 70's, the p 1 method and the ρ method. The fastest algorithms, however, utilize the− same trick as Fermat, examples of which are the Continued Fraction Method, the Quadratic Sieve (and it variants), and the Number Field Sieve (and its variants). The exception to this is the El- liptic Curve Method, which runs almost as fast as the Quadratic Sieve. -

Arxiv:1503.02592V1
MATHEMATICS OF COMPUTATION Volume 00, Number 0, Pages 000–000 S 0025-5718(XX)0000-0 TWO COMPACT INCREMENTAL PRIME SIEVES JONATHAN P. SORENSON Abstract. A prime sieve is an algorithm that finds the primes up to a bound n. We say that a prime sieve is incremental, if it can quickly determine if n+1 is prime after having found all primes up to n. We say a sieve is compact if it uses roughly √n space or less. In this paper we present two new results: We describe the rolling sieve, a practical, incremental prime sieve that • takes O(n log log n) time and O(√n log n) bits of space, and We show how to modify the sieve of Atkin and Bernstein [1] to obtain a • sieve that is simultaneously sublinear, compact, and incremental. The second result solves an open problem given by Paul Pritchard in 1994 [19]. 1. Introduction and Definitions A prime sieve is an algorithm that finds all prime numbers up to a given bound n. The fastest known algorithms, including Pritchard’s wheel sieve [16] and the Atkin- Bernstein sieve [1], can do this using at most O(n/ log log n) arithmetic operations. The easy-to-code sieve of Eratosthenes requires O(n log log n) time, and there are a number of sieves in the literature that require linear time [17, 18]. Normally, running time is the main concern in algorithm design, but in this paper we are also interested in two other properties: incrementality and compactness. We say that a sieve is compact if it uses at most n1/2+o(1) space. -
Golden Oaks Software
New Method to Find Primes GOLDEN OAKS SOFTWARE Description of a New Method to Find Primes Golden Oaks Software 7524 Soquel Way Citrus Heights, CA 95610 Dr. Joe Butler [email protected] (916) 220 1654 30 September 2008 Copyright Date: Oct 06, 2008 Patent Date: Oct 08, 2008 Number: 61195490 PROPRIETARY STATEMENT This document contains commercial or financial information, or trade secrets, of Golden Oaks Software, which are proprietary and exempt from disclosure to the public under the Freedom of Information Act, 5 U.S.C. 552(b)(4), and unlawful disclosure thereof is a violation of the Trade Secrets Act, 18 U.S.C. 1905. Public disclosure of any such information or trade secrets shall not be made without the written permission of Golden Oaks Software. This document includes data that shall not be disclosed outside the Government and shall not be duplicated, used or disclosed, in whole or in part, for any purposes other than to evaluate the information. If however, a contract is awarded to this offeror as a result of, or in conjunction with, the submission of this data, the Government shall have the right to duplicate, use, or disclose, the data to the extent provided in the resulting contract. The restriction does not limit the Government’s right to use information contained in this data if it is obtained from other sources without restriction. The data subject to this restriction is contained in all sheets. primefnd.doc 1 11/22/2008 COPYRIGHT & PATENTED New Method to Find Primes ABSTRACT The following are documents and word description flowcharts of a new method to find prime numbers. -
The RSA Algorithm Clifton Paul Robinson
Bridgewater State University Virtual Commons - Bridgewater State University Honors Program Theses and Projects Undergraduate Honors Program 5-1-2018 The Key to Cryptography: The RSA Algorithm Clifton Paul Robinson Follow this and additional works at: http://vc.bridgew.edu/honors_proj Part of the Computer Sciences Commons Recommended Citation Robinson, Clifton Paul. (2018). The Key ot Cryptography: The RSA Algorithm. In BSU Honors Program Theses and Projects. Item 268. Available at: http://vc.bridgew.edu/honors_proj/268 Copyright © 2018 Clifton Paul Robinson This item is available as part of Virtual Commons, the open-access institutional repository of Bridgewater State University, Bridgewater, Massachusetts. The Key to Cryptography: The RSA Algorithm Clifton Paul Robinson Submitted in Partial Completion of the Requirements for Commonwealth Interdisciplinary Honors in Computer Science and Mathematics Bridgewater State University May 1, 2018 Dr. Jacqueline Anderson Thesis Co-Advisor Dr. Michael Black, Thesis Co-Advisor Dr. Ward Heilman, Committee Member Dr. Haleh Khojasteh, Committee Member BRIDGEWATER STATE UNIVERSITY UNDERGRADUATE THESIS The Key To Cryptography: The RSA Algorithm Author: Advisors: Clifton Paul ROBINSON Dr. Jackie ANDERSON Dr. Michael BLACK Submitted in Partial Completion of the Requirements for Commonwealth Honors in Computer Science and Mathematics Dr. Ward Heilman, Reading Committee Dr. Haleh Khojasteh, Reading Committee ii Dedicated to Mom, Dad, James, and Mimi iii Contents Abstractv 1 Introduction1 1.1 The Project Overview........................1 2 Theorems and Definitions2 2.1 Definitions..............................2 2.2 Theorems...............................5 3 The History of Cryptography6 3.1 Origins................................6 3.2 A Transition.............................6 3.3 Cryptography at War........................7 3.4 The Creation and Uses of RSA...................7 4 The Mathematics9 4.1 What is a Prime Number?.....................9 4.2 Factoring Numbers........................ -

Integer Factorization and Computing Discrete Logarithms in Maple
Integer Factorization and Computing Discrete Logarithms in Maple Aaron Bradford∗, Michael Monagan∗, Colin Percival∗ [email protected], [email protected], [email protected] Department of Mathematics, Simon Fraser University, Burnaby, B.C., V5A 1S6, Canada. 1 Introduction As part of our MITACS research project at Simon Fraser University, we have investigated algorithms for integer factorization and computing discrete logarithms. We have implemented a quadratic sieve algorithm for integer factorization in Maple to replace Maple's implementation of the Morrison- Brillhart continued fraction algorithm which was done by Gaston Gonnet in the early 1980's. We have also implemented an indexed calculus algorithm for discrete logarithms in GF(q) to replace Maple's implementation of Shanks' baby-step giant-step algorithm, also done by Gaston Gonnet in the early 1980's. In this paper we describe the algorithms and our optimizations made to them. We give some details of our Maple implementations and present some initial timings. Since Maple is an interpreted language, see [7], there is room for improvement of both implementations by coding critical parts of the algorithms in C. For example, one of the bottle-necks of the indexed calculus algorithm is finding and integers which are B-smooth. Let B be a set of primes. A positive integer y is said to be B-smooth if its prime divisors are all in B. Typically B might be the first 200 primes and y might be a 50 bit integer. ∗This work was supported by the MITACS NCE of Canada. 1 2 Integer Factorization Starting from some very simple instructions | \make integer factorization faster in Maple" | we have implemented the Quadratic Sieve factoring al- gorithm in a combination of Maple and C (which is accessed via Maple's capabilities for external linking). -

The Number Field Sieve for Discrete Logarithms
The Number Field Sieve for Discrete Logarithms Henrik Røst Haarberg Master of Science Submission date: June 2016 Supervisor: Kristian Gjøsteen, MATH Norwegian University of Science and Technology Department of Mathematical Sciences Abstract We present two general number field sieve algorithms solving the discrete logarithm problem in finite fields. The first algorithm pre- sented deals with discrete logarithms in prime fields Fp, while the second considers prime power fields Fpn . We prove, using the standard heuristic, that these algorithms will run in sub-exponential time. We also give an overview of different index calculus algorithms solving the discrete logarithm problem efficiently for different possible relations between the characteristic and the extension degree. To be able to give a good introduction to the algorithms, we present theory necessary to understand the underlying algebraic structures used in the algorithms. This theory is largely algebraic number theory. 1 Contents 1 Introduction 4 1.1 Discrete logarithms . .4 1.2 The general number field sieve and L-notation . .4 2 Theory 6 2.1 Number fields . .6 2.1.1 Dedekind domains . .7 2.1.2 Module structure . .9 2.1.3 Norm of ideals . .9 2.1.4 Units . 10 2.2 Prime ideals . 10 2.3 Smooth numbers . 13 2.3.1 Density . 13 2.3.2 Exponent vectors . 13 3 The number field sieve in prime fields 15 3.1 Overview . 15 3.2 Calculating logarithms . 15 3.3 Sieving . 17 3.4 Schirokauer maps . 18 3.5 Linear algebra . 20 3.5.1 A note about smooth t and g .............. 22 3.6 Run time . -

Secure Communication Protocols, Secret Sharing and Authentication Based on Goldbach Partitions
SECURE COMMUNICATION PROTOCOLS, SECRET SHARING AND AUTHENTICATION BASED ON GOLDBACH PARTITIONS By ADNAN AHMED MEMON Bachelor of Engineering in Telecommunication Sukkur Institute of Business Administration Sukkur, Sindh, Pakistan 2012 Submitted to the Faculty of the Graduate College of the Oklahoma State University in partial fulfillment of the requirements for the Degree of MASTER OF SCIENCE July, 2017 SECURE COMMUNICATION PROTOCOLS, SECRET SHARING AND AUTHENTICATION BASED ON GOLDBACH PARTITIONS Thesis Approved: Dr. Subhash C. Kak Thesis Adviser Dr. Qi Cheng Dr. Yanmin (Emily) Gong ii ACKNOWLEDGEMENTS Foremost, I would like to thank Almighty Allah for bestowing upon me His countless blessings, giving me strength and good health to finish this research. It is a great pleasure to acknowledge my deepest thanks to Prof. Subhash Kak, Regents Professor, School of Electrical and Computer Engineering, Oklahoma State University, Stillwater, OK, USA, whose consistent supervision and motivation enabled me to complete this research successfully. I would like to thank my family, especially my Mom for encouraging and supporting me during this whole thesis period. Thank you friends for being with me in difficult times. I would like to thank my sponsors i.e. Fulbright, IIE and USEFP for providing me fully funded scholarship so that I could focus on my research. This would not have been possible without their support. I would like to dedicate this research to my (late) father Mr. Ghulam Sarwar Memon who has always been a role model for me. iii Acknowledgements reflect the views of the author and are not endorsed by committee members or Oklahoma State University. Name: ADNAN AHMED MEMON Date of Degree: JULY, 2017 Title of Study: SECURE COMMUNICATION PROTOCOLS, SECRET SHARING AND AUTHENTICATION BASED ON GOLDBACH PARTITIONS Major Field: ELECTRICAL ENGINEERING Abstract: This thesis investigates the use of Goldbach partitions for secure communication protocols and for finding large prime numbers that are fundamental to these protocols.