Imperial College London Arxiv:1509.01549V2 [Cs.AI] 14 Sep
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cougar Stalks Deer
predators were aroundi" Science has produced an abundance of evidence that predation on prey, such as rabbits and deer, actually benefits the prey species as a whole by 1) keeping populations at a sustainable level for the amount of vegetative food and other resources in an area, and 2) improving the gene pool over time by preying on the weakest, and therefore ensuring chat the most 6t and survival-strong genes get passed on. Predation makes both predator and prey species stronger. Cougar Stalks Deer Animal Forms, Expanding the Senses, f0Rt R0uTmEs Questioning and Tracking, Listening for Bird Lang,tage tI Sneaking, Imitating Animals, Challenge .!er Mammals 7h Bt}t}K OF IIATURE Southeast: Activate, Southl Focus, Northeastl I{ATURAL CYCTE Open and Listen til0tcATR0s Aliveness and Agrlity, Quiet Mind, ()F AU{ARTilESS Common Sense Prirner Cougars hunt Deer by sneaking up from behind so stealthily that they remain unaware. A Cougar stalks slowly, moving low to the ground, making almost no noise as its hind foot lands exactly where its front foot had been. After a stalking Cougar gets close behind a Deer, they powerfully lunge onto the deer's back, biting into the neck. I bet you didn't know this: Cougars actually have nerve endings on the rips oftheir big canine teeth so that they can feel exactly where to put their teeth and bite, immediately severing the spine and killing the Deer quickly and painlessly. The only protection a Deer has from a stalking Cougar is its sensory awareness. If it hears something and turns to see the Cougar moving, the Deer can bound offeasily to safety and the hunt ends. -

Heraldry Examples Booklet.Cdr
Book Heraldry Examples By Khevron No color on color or metal on metal. Try to keep it simple. Make it easy to paint, applique’ or embroider. Blazon in layers from the deepest layer Per pale vert and sable all semy of caltrops e a talbot passant argent. c up to the surface: i v Field (color or division & colors), e Primary charge (charge or ordinary), Basic Book Heraldry d Secondary charges close to the primary, by Khevron a Tertiary charges on the primary or secondary, Device: An heraldic representation of youself. g Peripheral secondary charges (Chief,Canton,Border), Arms: A device of someone with an Award of Arms. n i Tertiary charges on the peropheral. Badge: An heraldic representation of what you own. z a Name field tinctures chief/dexter first. l Only the first word, the metal Or, B and proper nouns are capitalized. 12 2 Tinctures, Furs & Heraldic 11 Field Treatments Cross Examples By Khevron By Khevron Crosses have unique characteristics and specific names. Tinctures: Metals and Colors Chief Rule #1: No color upon another color, or metal on metal! Canton r r e e t t s i x e n - Fess - i D Or Argent Sable Azure Vert Gules Purpure S Furs Base Cross Latin Cross Cross Crosslet Maltese Potent Latin Cross Floury Counter-Vair Vair Vair in PaleVair-en-pointe Vair Ancient Ermine Celtic Cross Cross Gurgity Crosslet Fitchy Cross Moline Cross of Bottony Jerusalem A saltire vair in saltire Vair Ermines or Counter- Counter Potent Potent-en-pointe ermine Cross Quarterly in Saltire Ankh Patonce Voided Cross Barby Cross of Cerdana Erminois Field -

Games Ancient and Oriental and How to Play Them, Being the Games Of
CO CD CO GAMES ANCIENT AND ORIENTAL AND HOW TO PLAY THEM. BEING THE GAMES OF THE ANCIENT EGYPTIANS THE HIERA GRAMME OF THE GREEKS, THE LUDUS LATKUNCULOKUM OF THE ROMANS AND THE ORIENTAL GAMES OF CHESS, DRAUGHTS, BACKGAMMON AND MAGIC SQUAEES. EDWARD FALKENER. LONDON: LONGMANS, GEEEN AND Co. AND NEW YORK: 15, EAST 16"' STREET. 1892. All rights referred. CONTENTS. I. INTRODUCTION. PAGE, II. THE GAMES OF THE ANCIENT EGYPTIANS. 9 Dr. Birch's Researches on the games of Ancient Egypt III. Queen Hatasu's Draught-board and men, now in the British Museum 22 IV. The of or the of afterwards game Tau, game Robbers ; played and called by the same name, Ludus Latrunculorum, by the Romans - - 37 V. The of Senat still the modern and game ; played by Egyptians, called by them Seega 63 VI. The of Han The of the Bowl 83 game ; game VII. The of the Sacred the Hiera of the Greeks 91 game Way ; Gramme VIII. Tlie game of Atep; still played by Italians, and by them called Mora - 103 CHESS. IX. Chess Notation A new system of - - 116 X. Chaturanga. Indian Chess - 119 Alberuni's description of - 139 XI. Chinese Chess - - - 143 XII. Japanese Chess - - 155 XIII. Burmese Chess - - 177 XIV. Siamese Chess - 191 XV. Turkish Chess - 196 XVI. Tamerlane's Chess - - 197 XVII. Game of the Maharajah and the Sepoys - - 217 XVIII. Double Chess - 225 XIX. Chess Problems - - 229 DRAUGHTS. XX. Draughts .... 235 XX [. Polish Draughts - 236 XXI f. Turkish Draughts ..... 037 XXIII. }\'ci-K'i and Go . The Chinese and Japanese game of Enclosing 239 v. -
Here Should That It Was Not a Cheap Check Or Spite Check Be Better Collaboration Amongst the Federations to Gain Seconds
Chess Contents Founding Editor: B.H. Wood, OBE. M.Sc † Executive Editor: Malcolm Pein Editorial....................................................................................................................4 Editors: Richard Palliser, Matt Read Malcolm Pein on the latest developments in the game Associate Editor: John Saunders Subscriptions Manager: Paul Harrington 60 Seconds with...Chris Ross.........................................................................7 Twitter: @CHESS_Magazine We catch up with Britain’s leading visually-impaired player Twitter: @TelegraphChess - Malcolm Pein The King of Wijk...................................................................................................8 Website: www.chess.co.uk Yochanan Afek watched Magnus Carlsen win Wijk for a sixth time Subscription Rates: United Kingdom A Good Start......................................................................................................18 1 year (12 issues) £49.95 Gawain Jones was pleased to begin well at Wijk aan Zee 2 year (24 issues) £89.95 3 year (36 issues) £125 How Good is Your Chess?..............................................................................20 Europe Daniel King pays tribute to the legendary Viswanathan Anand 1 year (12 issues) £60 All Tied Up on the Rock..................................................................................24 2 year (24 issues) £112.50 3 year (36 issues) £165 John Saunders had to work hard, but once again enjoyed Gibraltar USA & Canada Rocking the Rock ..............................................................................................26 -
Draft – Not for Circulation
A Gross Miscarriage of Justice in Computer Chess by Dr. Søren Riis Introduction In June 2011 it was widely reported in the global media that the International Computer Games Association (ICGA) had found chess programmer International Master Vasik Rajlich in breach of the ICGA‟s annual World Computer Chess Championship (WCCC) tournament rule related to program originality. In the ICGA‟s accompanying report it was asserted that Rajlich‟s chess program Rybka contained “plagiarized” code from Fruit, a program authored by Fabien Letouzey of France. Some of the headlines reporting the charges and ruling in the media were “Computer Chess Champion Caught Injecting Performance-Enhancing Code”, “Computer Chess Reels from Biggest Sporting Scandal Since Ben Johnson” and “Czech Mate, Mr. Cheat”, accompanied by a photo of Rajlich and his wife at their wedding. In response, Rajlich claimed complete innocence and made it clear that he found the ICGA‟s investigatory process and conclusions to be biased and unprofessional, and the charges baseless and unworthy. He refused to be drawn into a protracted dispute with his accusers or mount a comprehensive defense. This article re-examines the case. With the support of an extensive technical report by Ed Schröder, author of chess program Rebel (World Computer Chess champion in 1991 and 1992) as well as support in the form of unpublished notes from chess programmer Sven Schüle, I argue that the ICGA‟s findings were misleading and its ruling lacked any sense of proportion. The purpose of this paper is to defend the reputation of Vasik Rajlich, whose innovative and influential program Rybka was in the vanguard of a mid-decade paradigm change within the computer chess community. -

Heraldic Terms
HERALDIC TERMS The following terms, and their definitions, are used in heraldry. Some terms and practices were used in period real-world heraldry only. Some terms and practices are used in modern real-world heraldry only. Other terms and practices are used in SCA heraldry only. Most are used in both real-world and SCA heraldry. All are presented here as an aid to heraldic research and education. A LA CUISSE, A LA QUISE - at the thigh ABAISED, ABAISSÉ, ABASED - a charge or element depicted lower than its normal position ABATEMENTS - marks of disgrace placed on the shield of an offender of the law. There are extreme few records of such being employed, and then only noted in rolls. (As who would display their device if it had an abatement on it?) ABISME - a minor charge in the center of the shield drawn smaller than usual ABOUTÉ - end to end ABOVE - an ambiguous term which should be avoided in blazon. Generally, two charges one of which is above the other on the field can be blazoned better as "in pale an X and a Y" or "an A and in chief a B". See atop, ensigned. ABYSS - a minor charge in the center of the shield drawn smaller than usual ACCOLLÉ - (1) two shields side-by-side, sometimes united by their bottom tips overlapping or being connected to each other by their sides; (2) an animal with a crown, collar or other item around its neck; (3) keys, weapons or other implements placed saltirewise behind the shield in a heraldic display. -
The USCF Elo Rating System by Steven Craig Miller
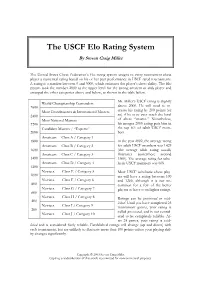
The USCF Elo Rating System By Steven Craig Miller The United States Chess Federation’s Elo rating system assigns to every tournament chess player a numerical rating based on his or her past performance in USCF rated tournaments. A rating is a number between 0 and 3000, which estimates the player’s chess ability. The Elo system took the number 2000 as the upper level for the strong amateur or club player and arranged the other categories above and below, as shown in the table below. Mr. Miller’s USCF rating is slightly World Championship Contenders 2600 above 2000. He will need to in- Most Grandmasters & International Masters crease his rating by 200 points (or 2400 so) if he is to ever reach the level Most National Masters of chess “master.” Nonetheless, 2200 his meager 2000 rating puts him in Candidate Masters / “Experts” the top 6% of adult USCF mem- 2000 bers. Amateurs Class A / Category 1 1800 In the year 2002, the average rating Amateurs Class B / Category 2 for adult USCF members was 1429 1600 (the average adult rating usually Amateurs Class C / Category 3 fluctuates somewhere around 1400 1500). The average rating for scho- Amateurs Class D / Category 4 lastic USCF members was 608. 1200 Novices Class E / Category 5 Most USCF scholastic chess play- 1000 ers will have a rating between 100 Novices Class F / Category 6 and 1200, although it is not un- 800 common for a few of the better Novices Class G / Category 7 players to have even higher ratings. 600 Novices Class H / Category 8 Ratings can be provisional or estab- 400 lished. -

Elo World, a Framework for Benchmarking Weak Chess Engines
Elo World, a framework for with a rating of 2000). If the true outcome (of e.g. a benchmarking weak chess tournament) doesn’t match the expected outcome, then both player’s scores are adjusted towards values engines that would have produced the expected result. Over time, scores thus become a more accurate reflection DR. TOM MURPHY VII PH.D. of players’ skill, while also allowing for players to change skill level. This system is carefully described CCS Concepts: • Evaluation methodologies → Tour- elsewhere, so we can just leave it at that. naments; • Chess → Being bad at it; The players need not be human, and in fact this can facilitate running many games and thereby getting Additional Key Words and Phrases: pawn, horse, bishop, arbitrarily accurate ratings. castle, queen, king The problem this paper addresses is that basically ACH Reference Format: all chess tournaments (whether with humans or com- Dr. Tom Murphy VII Ph.D.. 2019. Elo World, a framework puters or both) are between players who know how for benchmarking weak chess engines. 1, 1 (March 2019), to play chess, are interested in winning their games, 13 pages. https://doi.org/10.1145/nnnnnnn.nnnnnnn and have some reasonable level of skill. This makes 1 INTRODUCTION it hard to give a rating to weak players: They just lose every single game and so tend towards a rating Fiddly bits aside, it is a solved problem to maintain of −∞.1 Even if other comparatively weak players a numeric skill rating of players for some game (for existed to participate in the tournament and occasion- example chess, but also sports, e-sports, probably ally lose to the player under study, it may still be dif- also z-sports if that’s a thing). -

Proposal to Encode Heterodox Chess Symbols in the UCS Source: Garth Wallace Status: Individual Contribution Date: 2016-10-25
Title: Proposal to Encode Heterodox Chess Symbols in the UCS Source: Garth Wallace Status: Individual Contribution Date: 2016-10-25 Introduction The UCS contains symbols for the game of chess in the Miscellaneous Symbols block. These are used in figurine notation, a common variation on algebraic notation in which pieces are represented in running text using the same symbols as are found in diagrams. While the symbols already encoded in Unicode are sufficient for use in the orthodox game, they are insufficient for many chess problems and variant games, which make use of extended sets. 1. Fairy chess problems The presentation of chess positions as puzzles to be solved predates the existence of the modern game, dating back to the mansūbāt composed for shatranj, the Muslim predecessor of chess. In modern chess problems, a position is provided along with a stipulation such as “white to move and mate in two”, and the solver is tasked with finding a move (called a “key”) that satisfies the stipulation regardless of a hypothetical opposing player’s moves in response. These solutions are given in the same notation as lines of play in over-the-board games: typically algebraic notation, using abbreviations for the names of pieces, or figurine algebraic notation. Problem composers have not limited themselves to the materials of the conventional game, but have experimented with different board sizes and geometries, altered rules, goals other than checkmate, and different pieces. Problems that diverge from the standard game comprise a genre called “fairy chess”. Thomas Rayner Dawson, known as the “father of fairy chess”, pop- ularized the genre in the early 20th century. -

Heraldry & the Parts of a Coat of Arms
Heraldry reference materials The tomb of Geoffrey V, Count of Anjou (died 1151) is the first recorded example of hereditary armory in Europe. The same shield shown here is found on the tomb effigy of his grandson, William Longespée, 3rd Earl of Salisbury. Heraldry & the Parts of a Coat of Arms From fleur-de-lis.com Here are some charts from Irish surnames.com, but you can look up more specific information for you by searching “charges” and the words that allude to your ancestors’ backgrounds and cultures, if you prefer. Also try: http://www.rarebooks.nd.edu/digital/heraldry/charges/crowns.html for a good reference source on charges. THE COLORS ON COATS OF ARMS Color Meaning Image Generosity Or (Gold) Argent (Silver or White) Sincerity, Peace Justice, Sovereignty, Purpure (Purple) Regal Warrior, Martyr, Military Gules (Red) Strength Azure (Blue) Strength, Loyalty Vert (Green) Hope, loyalty in love Sable (Black) Constancy, Grief Tenne or Tawny (Orange) Worthwhile Ambition Sanguine or Murray Victorious, Patient in Battle (Maroon) LINES ON COATS OF ARMS Name Meaning Image Irish Example Clouds or Air Nebuly Line Wavy Line Sea or Water Gillespie Embattled Fire, Town-Wall Patterson Line Engrailed Earth, Land Feeney Line Invecked Earth, Land Rowe Line Indented Fire Power Line HERALDIC BEASTS Name Meaning Image Irish Example Fierce Courage. In Ireland the Lion represented the 'lion' season, Lawlor Lion prior to the full arrival of Dillon Summer. The symbol can Condon also represent a great Warrior or Chief. Tiger Fierceness and valour Of Regal origin, one of high nature. In Ireland the Fish is associated with the legend of Fionn who became the first to Roche Fish taste the 'salmon of knowledge'. -

Elo and Glicko Standardised Rating Systems by Nicolás Wiedersheim Sendagorta Introduction “Manchester United Is a Great Team” Argues My Friend
Elo and Glicko Standardised Rating Systems by Nicolás Wiedersheim Sendagorta Introduction “Manchester United is a great team” argues my friend. “But it will never be better than Manchester City”. People rate everything, from films and fashion to parks and politicians. It’s usually an effortless task. A pool of judges quantify somethings value, and an average is determined. However, what if it’s value is unknown. In this scenario, economists turn to auction theory or statistical rating systems. “Skill” is one of these cases. The Elo and Glicko rating systems tend to be the go-to when quantifying skill in Boolean games. Elo Rating System Figure 1: Arpad Elo As I started playing competitive chess, I came across the Figure 2: Top Elo Ratings for 2014 FIFA World Cup Elo rating system. It is a method of calculating a player’s relative skill in zero-sum games. Quantifying ability is helpful to determine how much better some players are, as well as for skill-based matchmaking. It was devised in 1960 by Arpad Elo, a professor of Physics and chess master. The International Chess Federation would soon adopt this rating system to divide the skill of its players. The algorithm’s success in categorising people on ability would start to gain traction in other win-lose games; Association football, NBA, and “esports” being just some of the many examples. Esports are highly competitive videogames. The Elo rating system consists of a formula that can determine your quantified skill based on the outcome of your games. The “skill” trend follows a gaussian bell curve. -
Extensions of the Elo Rating System for Margin of Victory
Extensions of the Elo Rating System for Margin of Victory MathSport International 2019 - Athens, Greece Stephanie Kovalchik 1 / 46 2 / 46 3 / 46 4 / 46 5 / 46 6 / 46 7 / 46 How Do We Make Match Forecasts? 8 / 46 It Starts with Player Ratings Assume the the ith player has some true ability θi. Models of player abilities assume game outcomes are a function of the difference in abilities Prob(Wij = 1) = F(θi − θj) 9 / 46 Paired Comparison Models Bradley-Terry models are a general class of paired comparison models of latent abilities with a logistic function for win probabilities. 1 F(θi − θj) = 1 + α−(θi−θj) With BT, player abilities are treated as Hxed in time which is unrealistic in most cases. 10 / 46 Bobby Fischer 11 / 46 Fischer's Meteoric Rise 12 / 46 Arpad Elo 13 / 46 In His Own Words 14 / 46 Ability is a Moving Target 15 / 46 Standard Elo Can be broken down into two steps: 1. Estimate (E-Step) 2. Update (U-Step) 16 / 46 Standard Elo E-Step For tth match of player i against player j, the chance that player i wins is estimated as, 1 W^ ijt = 1 + 10−(Rit−Rjt)/σ 17 / 46 Elo Derivation Elo supposed that the ratings of any two competitors were independent and normal with shared standard deviation δ. Given this, he likened the chance of a win to the chance of observing a difference in ratings for ratings drawn from the same distribution, 2 Rit − Rjt ∼ N(0, 2δ ) which leads to, Rit − Rjt P(Rit − Rjt > 0) = Φ( ) √2δ and ≈ 1/(1 + 10−(Rit−Rjt)/2δ) Elo's formula was just a hack for the cumulative normal density function.