Master Thesis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Suspension Geometry and Computation
Suspension Geometry and Computation By the same author: The Shock Absorber Handbook, 2nd edn (Wiley, PEP, SAE) Tires, Suspension and Handling, 2nd edn (SAE, Arnold). The High-Performance Two-Stroke Engine (Haynes) Suspension Geometry and Computation John C. Dixon, PhD, F.I.Mech.E., F.R.Ae.S. Senior Lecturer in Engineering Mechanics The Open University, Great Britain. This edition first published 2009 Ó 2009 John Wiley & Sons Ltd Registered office John Wiley & Sons Ltd, The Atrium, Southern Gate, Chichester, West Sussex, PO19 8SQ, United Kingdom For details of our global editorial offices, for customer services and for information about how to apply for permission to reuse the copyright material in this book please see our website at www.wiley.com. The right of the author to be identified as the author of this work has been asserted in accordance with the Copyright, Designs and Patents Act 1988. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, except as permitted by the UK Copyright, Designs and Patents Act 1988, without the prior permission of the publisher. Wiley also publishes its books in a variety of electronic formats. Some content that appears in print may not be available in electronic books. Designations used by companies to distinguish their products are often claimed as trademarks. All brand names and product names used in this book are trade names, service marks, trademarks or registered trademarks of their respective owners. The publisher is not associated with any product or vendor mentioned in this book. -

Suspension System Need of Suspension
Suspension system Need of Suspension • Support the weight of the frame, body, engine, transmission, drive train, passengers, and cargo. • Provide a smooth, comfortable ride by allowing the wheels and tires to move up and down with minimum movement of the vehicle. • Work with the steering system to help keep the wheels in correct alignment. • Keep the tires in firm contact with the road, even after striking bumps or holes in the road. • Allow rapid cornering without extreme body roll (vehicle leans to one side). • Allow the front wheels to turn from side to side for steering. • Prevent excessive body squat (body tilts down in rear) when accelerating or carrying heavy loads. • Prevent excessive body dive (body tilts down in the front) when braking. 08-05-2020 2 Suspension system 08-05-2020 3 Types of suspensions • The type of suspension springs used in automobile are • Metal springs Laminated or leaf Coil Torison bar • Rubber springs • Pneumatic springs Commonly used are leaf springs and coil springs • Leaf springs are mostly used in dependent suspension system. • Coil springs and torsion bar are used in mostly in independent suspension system. • Coil springs can store about twice as much energy per unit volume compared to that of leaf spring. Thus for the same job coil springs need weight only about half that of leaf spring. • Leaf springs both cushion the shock and guide the cushioned motion. • Coil springs can serve the both provided sway bars are used along with. 08-05-2020 4 Suspension system as a two mass system 08-05-2020 5 Leaf Spring suspension • These springs are made by placing several flat strips one over the other. -

Instructions for M-Xxxx-Xxxx
M-9602-M Spring and Stabilizer Bar Kit w/ MagneRide Calibration NO PART OF THIS DOCUMENT MAY BE REPRODUCED WITHOUT PRIOR AGREEMENT AND WRITTEN PERMISSION OF FORD PERFORMANCE PARTS Please visit www. performanceparts.ford.com for the most current instruction and warranty information. PLEASE READ ALL OF THE FOLLOWING INSTRUCTIONS CAREFULLY PRIOR TO INSTALLATION. AT ANY TIME YOU DO NOT UNDERSTAND THE INSTRUCTIONS, PLEASE CALL THE FORD PERFORMANCE TECHLINE AT 1-800-367-3788 M-9602-M is designed for 2018+ Mustangs equipped with MagneRide and includes a unique MagneRide calibration that is loaded with the included Procal voucher and software. Please reference the instruction tab on the Procal and make sure you use version 3.9+ Kit Includes: Front Stabilizer Bar Front Springs Rear Stabilizer Bar Rear Springs MagneRide Tuning Calibration Front Stabilizer Bar Removal NOTICE: Suspension fasteners are critical parts that affect the performance of vital components and systems. Failure of these fasteners may result in major service expense. Use the same or equivalent parts if replacement is necessary. Do not use a replacement part of lesser quality or substitute design. Tighten fasteners as specified. 1. Remove all 4 wheels and tires and set aside. 2. On both sides. 1. NOTE: The stabilizer bar links are designed with low friction ball joints that have a low breakaway torque. NOTE: Use the hex-holding feature to prevent the ball stud from turning while removing the stabilizer bar link nut. Remove and the front stabilizer bar link lower nut. 2. Position aside the front stabilizer bar link. Factory Ford shop manuals are available from Helm Publications, 1-800-782-4356 Techline 1-800-367-3788 Page 1 of 41 IS-1850-0631 M-9602-M Spring and Stabilizer Bar Kit w/ MagneRide Calibration NO PART OF THIS DOCUMENT MAY BE REPRODUCED WITHOUT PRIOR AGREEMENT AND WRITTEN PERMISSION OF FORD PERFORMANCE PARTS 4. -

Schaeffler Symposium 2018
2018 Schaeffler Symposium 9/6/2018 Intelligent Active Roll Control INTELLIGENT ACTIVE ROLL CONTROL SHAUN TATE 1 2018 Schaeffler Symposium 9/6/2018 Intelligent Active Roll Control Production Experience & Awards Series Production – 12V BMW 7 Series 2015 BMW 5 Series 2017 RR Phantom 2018 Series Production – 48V Bentley Bentayga 2015 Audi SQ7 2016 Porsche Panamera 2017 Porsche Cayenne 2017 Bentley Continental 2018 Award‐Winning System German Innovation Award Vehicle Dynamics International Award Auto Test Sieger PACE Award 2016 2016 2016 2017 Feature to Product Mapping Stationary Ride Comfort Feature Adaptive Suspension Setup Agility & Stability Conditions Improvement Control Response Clearance Vertical Acceleration Exit Base Stability / Roll Leveling Acceleration Steering Products ‐ Easy Loading Easy Entry Easy Parking Adapt Ground Adapt Wheel Increase Articulation Load Reduce Acceleration Reduce Lateral Reduce Yaw Adapt Self Adapt Steering Dynamic Body Trailer iARC 2 2018 Schaeffler Symposium 9/6/2018 Intelligent Active Roll Control Market Trends & Features Trend 3: Large Trucks/SUVs/Vans for improved comfort and more safety Weight Trend 2: HEV/EV for improved comfort and system availability Vehicle Trend 1: SUV for improved comfort and agility Vehicle Center of Gravity Selling Features Using Schaeffler iARC System Feature Driving Dynamics Comfort Features ADAS Support L3 / Active Safety ‐ Roll Into m Lane Mode ‐ Self Steering Yaw Ride Stability Body Tilt Control Control Emergency Split Free Speed Road Vehicle Class ‐ Stability Active Control -

Product Information Sheet Steering and Suspension System Trainer
Product Information Sheet Steering and Suspension System Trainer This real component trainer provides the instructor with a . Remove, inspect, and install coil springs and spring working light vehicle steering and suspension system for insulators. group or whole-class demonstration. Inspect, replace, and adjust track rod ends, track rod sleeves, and clamps. This includes all the individual components of the system . Remove, inspect, and install upper and lower wishbones, presented on a moveable, steel frame so that each bushes, shafts, and rebound bumpers. component can be clearly identified. Remove, inspect, and install hub carrier assemblies. Inspect, remove, and replace dampers. The system comprises front wheel assemblies, MacPherson strut and coil spring assemblies, road wheels and power Items Included: steering rack. Trainer (right-hand and left-hand drive options available) . The trainer can also be used in conjunction with our Other Items Required: optional cloud-based software, which offers online practical tasks as well as interactive theory presentations, . Automotive workshop tools investigations, and assessments, which link directly to the . AC supply outlet (110V/230V options available) practical activities carried out using this resource. General Information: Trainer Enables Demonstrations of the Following: Trainer Dimensions (W x D x H): . Introduce the steering and suspension system trainer. 1750 x 1250 x 1500 mm / 69 x 49 x 59 inches . Inspect steering shaft universal joint, flexible coupling, Packed Volume: Approx. 3.67m3 / 130ft3 collapsible column, lock cylinder mechanism, and Packed Weight: Approx. 360kg / 795lb steering wheel. Packed Dimensions (W x D x H): . Disassemble, inspect, and reassemble rack and pinion 1904 x 1244 x 1550 mm / 75 x 49 x 62 inches steering gear. -

Development and Analysis of a Multi-Link Suspension for Racing Applications
Development and analysis of a multi-link suspension for racing applications W. Lamers DCT 2008.077 Master’s thesis Coach: dr. ir. I.J.M. Besselink (Tu/e) Supervisor: Prof. dr. H. Nijmeijer (Tu/e) Committee members: dr. ir. R.M. van Druten (Tu/e) ir. H. Vun (PDE Automotive) Technische Universiteit Eindhoven Department Mechanical Engineering Dynamics and Control Group Eindhoven, May, 2008 Abstract University teams from around the world compete in the Formula SAE competition with prototype formula vehicles. The vehicles have to be developed, build and tested by the teams. The University Racing Eindhoven team from the Eindhoven University of Technology in The Netherlands competes with the URE04 vehicle in the 2007-2008 season. A new multi-link suspension has to be developed to improve handling, driver feedback and performance. Tyres play a crucial role in vehicle dynamics and therefore are tyre models fitted onto tyre measure- ment data such that they can be used to chose the tyre with the best characteristics, and to develop the suspension kinematics of the vehicle. These tyre models are also used for an analytic vehicle model to analyse the influence of vehicle pa- rameters such as its mass and centre of gravity height to develop a design strategy. Lowering the centre of gravity height is necessary to improve performance during cornering and braking. The development of the suspension kinematics is done by using numerical optimization techniques. The suspension kinematic objectives have to be approached as close as possible by relocating the sus- pension coordinates. The most important improvements of the suspension kinematics are firstly the harmonization of camber dependant kinematics which result in the optimal camber angles of the tyres during driving. -
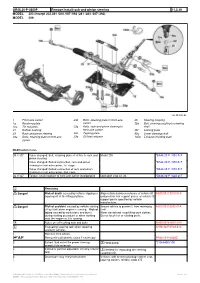
Remove/Install Rack-And-Pinion Steering 11.3.10 MODEL 203 (Except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209
AR46.20-P-0600P Remove/install rack-and-pinion steering 11.3.10 MODEL 203 (except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209 P46.20-2123-09 1 Front axle carrier 23b Bolts, retaining plate to front axle 25 Steering coupling 1g Retaining plate carrier 25a Bolt, steering coupling to steering 10a Tie rod joints 23g Bolts, rack-and-pinion steering to shaft 21 Rubber bushing front axle carrier 25f Locking plate 23 Rack-and-pinion steering 23n Tapping plate 80a Lower steering shaft 23a Bolts, retaining plate to front axle 23q Oil lines retainer 105d Exhaust shielding plate carrier Modification notes 29.11.07 Value changed: Bolt, retaining plate of oil line to rack-and- Model 203 *BA46.20-P-1001-01F pinion steering Value changed: Bolted connection, rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 1st stage Value changed: Bolted connection of rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 2nd stage 30.11.07 Torque, retaining plate to front axle carrier incorporated Operation step 23, 24 *BA46.20-P-1004-01F Removing Danger! Risk of death caused by vehicle slipping or Align vehicle between columns of vehicle lift AS00.00-Z-0010-01A toppling off of the lifting platform. and position four support plates at vehicle lift support points specified by vehicle manufacturer. Danger! Risk of accident caused by vehicle starting Secure vehicle to prevent it from moving by AS00.00-Z-0005-01A off by itself when engine is running. Risk of itself. -

Introduction the Original Transforming Utility Vehicle Takes on a Truck-Like
Introduction The original transforming utility vehicle takes on a truck-like visual appeal Kawasaki has raised the styling bar for 2009, offering a modern, rugged, truck-like body style for its versatile Mule™ 4010 Trans4x4® Diesel that quickly transforms from a four-person 4x4 to a two-person unit with an extended cargo bed. This new look complements popular changes made the prior model year, which saw the company add electric power steering (EPS) finesse to the extra grunt and convenience of this off-road utility vehicle. The new bodywork draws comparison to the styling of many modern pick-up trucks that are often seen working alongside the Mule. Its panels are durable, color-molded plastic that helps hide scuffing and its rugged-looking front hood can be lifted with the pull of a dash-mounted knob to reveal a now deeper storage space. This compartment also has convenient D-rings to secure cargo. The EPS offers a more controlled ride by reducing steering effort at low speeds and harnessing the electric motor’s inertia to dampen much of the bump steer and kickback caused by impacts to the wheel. Electrically driven, the motor is controlled by an Electronic Control Unit (ECU) that uses input from a vehicle speed sensor and torque sensor to determine the amount of assistance provided by the system. The system works immediately after the engine is started, yet doesn’t create a power drain on the engine. This off-road work horse features a fully automatic transmission with two or four-wheel drive options, and takes only a moment to convert from a two to a four-person ride. -

Electronic Stability Control Systems for Heavy Vehicles; Proposed Rule
Vol. 77 Wednesday, No. 100 May 23, 2012 Part III Department of Transportation National Highway Traffic Safety Administration 49 CFR Part 571 Federal Motor Vehicle Safety Standards; Electronic Stability Control Systems for Heavy Vehicles; Proposed Rule VerDate Mar<15>2010 18:07 May 22, 2012 Jkt 226001 PO 00000 Frm 00001 Fmt 4717 Sfmt 4717 E:\FR\FM\23MYP2.SGM 23MYP2 mstockstill on DSK4VPTVN1PROD with PROPOSALS2 30766 Federal Register / Vol. 77, No. 100 / Wednesday, May 23, 2012 / Proposed Rules DEPARTMENT OF TRANSPORTATION New Jersey Avenue SE., West Building A. UMTRI Study Ground Floor, Room W12–140, B. Simulator Study National Highway Traffic Safety Washington, DC 20590–0001 C. NHTSA Track Testing Administration • Hand Delivery or Courier: West 1. Effects of Stability Control Systems— Phase I Building Ground Floor, Room W12–140, 49 CFR Part 571 2. Developing a Dynamic Test Maneuver 1200 New Jersey Avenue SE., between and Performance Measure To Evaluate [Docket No. NHTSA–2012–0065] 9 a.m. and 5 p.m. ET, Monday through Roll Stability—Phase II Friday, except Federal holidays. (a) Test Maneuver Development RIN 2127–AK97 • Fax: (202) 493–2251 (b) Performance Measure Development Instructions: For detailed instructions 3. Developing a Dynamic Test Maneuver Federal Motor Vehicle Safety on submitting comments and additional and Performance Measure To Evaluate Standards; Electronic Stability Control information on the rulemaking process, Yaw Stability—Phase III Systems for Heavy Vehicles see the Public Participation heading of (a) Test Maneuver Development (b) Performance Measure Development the SUPPLEMENTARY INFORMATION AGENCY: National Highway Traffic section 4. Large Bus Testing Safety Administration (NHTSA), of this document. -

Ride Control Defined
RIDE CONTROL DEFINED According to Newton's First Law, a moving body will continue moving in a straight line until it is acted upon by another force. Newton's Second Law states that for each action there is an equal and opposite reaction. In the case of the automobile, whether the disturbing force is in the form of a wind-gust, an incline in the roadway, or the cornering forces produced by tires, the force causing the action and the force resisting the action will always be in balance. Many things affect vehicles in motion. Weight distribution, speed, road conditions and wind are some factors that affect how vehicles travel down the highway. Under all these variables however, the vehicle suspension system including the shocks, struts and springs must be in good condition. Worn suspension components may reduce the stability of the vehicle and reduce driver control. They may also accelerate wear on other suspension components. Replacing worn or inadequate shocks and struts will help maintain good ride control as they: Control spring and suspension movement Provide consistent handling and braking Prevent premature tire wear Help keep the tires in contact with the road Maintain dynamic wheel alignment Control vehicle bounce, roll, sway, dive and acceleration squat Reduce wear on other vehicle systems Promote even and balanced tire and brake wear Reduce driver fatigue Suspension concepts and components have changed and will continue to change dramatically, but the basic objective remains the same: 1. Provide steering stability with good handling characteristics 2. Maximize passenger comfort Achieving these objectives under all variables of a vehicle in motion is called ride control 1 BASIC TERMINOLOGY To begin this training program, you need to possess some very basic information. -

Design, Analysis and Optimization of Anti-Roll Bar
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Directory of Open Access Journals Pravin Bharane et al. Int. Journal of Engineering Research and Applications www.ijera.com ISSN : 2248-9622, Vol. 4, Issue 9( Version 4), September 2014, pp.137-140 RESEARCH ARTICLE OPEN ACCESS Design, Analysis and Optimization of Anti-Roll Bar Pravin Bharane*, Kshitijit Tanpure**, Amit Patil***, Ganesh Kerkal**** *,**,***,****( Assistant Professor, Department of Mechanical Engg., Dnyanganga College of Engg. & Research, Pune) ABSTRACT Vehicle anti-roll bar is part of an automobile suspension system which limits body roll angle. This U-shaped metal bar connects opposite wheels together through short lever arms and is clamped to the vehicle chassis with rubber bushes. Its function is to reduce body roll while cornering, also while travelling on uneven road which enhances safety and comfort during driving. Design changes of anti-roll bars are quite common at various steps of vehicle production and a design analysis must be performed for each change. So Finite Element Analysis (FEA) can be effectively used in design analysis of anti-roll bars. The finite element analysis is performed by ANSYS. This paper includes pre-processing, analysis, post processing, and analyzing the FEA results by using APDL (Ansys Parametric Design Language). The effects of anti-roll bar design parameters on final anti-roll bar properties are also evaluated by performing sample analyses with the FEA program developed in this project. Keywords: FEA, Anti Roll Bar, APDL, Design Parameters. I. INTRODUCTION Anti-roll bar, also referred to as stabilizer or ensure directional control and stability with adequate sway bar, is a rod or tube, usually made of steel, that traction and braking capabilities [1]. -

JAN 30 1968 Efgineering Llbf
\NT O ECJW .' J IS1 1967 4-1P-RA RIE-: OPTIMIZATION OF THE RANDOM VIBRATION CHARACTERISTICS OF VEHICLE SUSPENSIONS by ERICH KENNETH BENDER S.B., Massachusetts Institute of Technology (1962) S.M., Massachusetts Institute of Technology (1963) M.E., Massachusetts Institute of Technology (1966) SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF SCIENCE at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY June, 1967 Signature of Author ., Department of Mechanical Engineering, ') /) Wfril 27, 1967 Certified by Thesfs Su4'sor, /K/J Accepted by ....... ...... Chairman, Departktnital'Commit 4 'ee on Graduate Students .\ST. OF TECHN 010 JAN 30 1968 EfGINEERING Llbf. OPTIMIZATION OF THE RANDOM VIBRATION CHARACTERISTICS OF VEHICLE SUSPENSIONS by ERICH KENNETH BENDER Submitted in partial fulfillment of the require- ments for the degree of Doctor of Science at the Massachusetts Institute of Technology, June, 1967. ABSTRACT Some of the fundamental limitations and trade-offs regard- ing the capabilities of vehicle suspensions to control random vi- brations are investigated. The vehicle inputs considered are sta- tistically described roadway elevations and static loading vara- tions on the sprung mass. The vehicle is modeled as a two-degree- of-freedom linear system consisting of a sprung mass, suspension and an unsprung mass which is connected to the roadway by a spring. The criterion used to optimize the suspension characteristics is the weighted sum of rms vehicle acceleration and clearance space required for sprung mass-unsprung mass relative excursions. Two ap- proaches to find the suspension characteristics which optimize the trade-off between vibration and clearance space are considered. The first, based on Wiener filter theory, is used to synthesize the optimum suspension transfer function.