Existing Tunnel Emission Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Final Report
Transport and Housing Bureau The Government of the Hong Kong SAR FINAL REPORT Consultancy Services for Providing Expert Advice on Rationalising the Utilization of Road Harbour Crossings In Association with September 2010 CONSULTANCY SERVICES FOR PROVIDING EXPERT ADVICE ON RATIONALISING THE UTILISATION OF ROAD HARBOUR CROSSINGS FINAL REPORT September 2010 WILBUR SMITH ASSOCIATES LIMITED CONSULTANCY SERVICES FOR PROVIDING EXPERT ADVICE ON RATIONALISING THE UTILISATION OF ROAD HARBOUR CROSSINGS FINAL REPORT TABLE OF CONTENTS Chapter Title Page 1 BACKGROUND AND INTRODUCTION .......................................................................... 1-1 1.1 Background .................................................................................................................... 1-1 1.2 Introduction .................................................................................................................... 1-1 1.3 Report Structure ............................................................................................................. 1-3 2 STUDY METHODOLOGY .................................................................................................. 2-1 2.1 Overview of methodology ............................................................................................. 2-1 2.2 7-stage Study Methodology ........................................................................................... 2-2 3 IDENTIFICATION OF EXISTING PROBLEMS ............................................................. 3-1 3.1 Existing Problems -

Legislative Council Brief Free-Flow Tolling
File Ref.: THB(T)CR 1/4651/2019 LEGISLATIVE COUNCIL BRIEF Road Tunnels (Government) Ordinance (Chapter 368) Road Traffic Ordinance (Chapter 374) Tsing Sha Control Area Ordinance (Chapter 594) FREE-FLOW TOLLING (MISCELLANEOUS AMENDMENTS) BILL 2021 INTRODUCTION At the meeting of the Executive Council on 16 March 2021, the Council ADVISED and the Chief Executive ORDERED that the Free-Flow Tolling A (Miscellaneous Amendments) Bill 2021 (“the Bill”) , at Annex A, should be introduced into the Legislative Council (“LegCo”). JUSTIFICATIONS 2. At present, a motorist using a government tolled tunnel 1 or Tsing Sha Control Area (“TSCA”) (hereafter collectively referred to as “Tolled Tunnels”) may stop at a toll booth to pay the toll manually by tendering cash or prepaid toll tickets to a toll collector, or using the “stop-and-go” electronic payment facilities installed thereat. Alternatively, a motorist who drives a vehicle with an Autotoll tag issued by the Autotoll Limited (a private company) may pass through an Autotoll booth without stopping, with the toll payable deducted from a prepaid account. 3. The Hong Kong Smart City Blueprint published in December 2017 promulgated, among others, the development of toll tag (previously known as “in- vehicle unit”) for allowing motorists to pay tunnel tolls by remote means through an automatic tolling system, namely the “free-flow tolling system” (“FFTS”). In the Smart City Blueprint 2.0 published in December 2020, one of the Smart Mobility 1 Covering Cross-Harbour Tunnel, Eastern Harbour Crossing (“EHC”), Lion Rock Tunnel, Shing Mun Tunnels, Aberdeen Tunnel, Tate’s Cairn Tunnel and will cover the two Build-Operate- Transfer (“BOT”) tunnels, viz. -

Government Tolled Tunnels + Control Area LC Paper No. CB(4)
LC Paper No. CB(4)346/20-21(01) Government Tolled Tunnels + Control Area Legislative Council Panel on Transport Meeting on 5 Jan 2021 Smart Mobility Initiative Smart City Smart Mobility Blueprint Roadmap 2 Free-Flow Tolling System (FFTS) Free-FlowNo Toll Booths Tolling 3 How to Install 1 Vehicle-specific Toll Tag 2 Affix to Windscreen Issue to Vehicle Owners, No Power Supply Required Linked to a Specific Vehicle Easy to Install 4 How to Use 1 Drive at Normal Speed 2 Passage of Toll Point 3 Auto Payment 4 APP Notification 7:30 18 December 2020 Now Location : CHT (KL Bound) Toll : HK$20.0 Date : 18 Dec 2020 Time : 7:30am Payment : Toll Tag - AutoPay 5 How to Pay Multiple Mobile App / Website Payment Means AutoPay Bank Account 234-456-123-234 $ i Stored-value Lion Rock 2min ago Credit Card Dir : To Kowloon Facility Date : 12 Dec 2020, 7:30am Toll : HK$8.0 Lion Rock 1day ago Dir : To Shatin Date : 12 Dec 2020, 6:30pm Cash (only for Toll : HK$8.0 payment in arrears) Lion Rock 1day ago Dir : To Kowloon Date : 12 Dec 2020, 7:30am Toll : HK$8.0 Refreshed now16/1/202 TKO-LTT3 unread Tunnel messages 2 6 Alternatives Toll Tag No Toll Tag (not linked to a specific vehicle) 1 Procure according to Vehicle 1 Recognise Licence Plate Type Number 2 No Vehicle Information 2 Payment in Arrears within Grace 3 Stored-value Account Period 4 Top-Up at Designated Locations 7 Toll Recovery Mechanism 1 2 Auto Payment Vehicle without Unsuccessful Toll Tag electronic notification electronic notification Payment in Arrears within Grace Period settled within not settled within grace period grace period Notification to Payment Responsible Person Completed demanding for Unpaid Toll plus Surcharges 8 Toll Liability – Responsible Person Existing FFTS . -

Extension of Statutory No-Smoking Areas at Bus Interchanges (Post-Version)” (Ref No: MD 305)
W3C Text Description TV API - “Extension of Statutory No-smoking Areas at Bus Interchanges (Post-version)” (Ref No: MD 305) Extension of Statutory No-smoking Areas at Bus Interchanges [The screen shows in the morning, a young man waits in line for a bus at a bus interchange leading to tunnel.] [The scene changes. A young man enjoys music delightfully.] Super: Pleasant [The scene changes. A woman, waiting at the bus interchanges, smiles and takes a glance at somewhere far away.] Super: Smoke-free environment [The scene changes. A little girl holding hands with her mother, smiles happily while waiting for a bus.] Super: Everyone’s happy [The scene changes. A wide-shot of the bus interchange leading to a tunnel.] Voice-over To give passengers a better environment and cleaner air, 11 bus interchanges leading to expressways or tunnels have been designated as no-smoking areas Super: Eleven bus interchanges leading to expressways or tunnels have been designated as no-smoking areas Lion Rock Tunnel Tate’s Cairn Tunnel Cross-Harbour Tunnel Western Harbour Crossing Eastern Harbour Crossing Tai Lam Tunnel Shing Mun Tunnels Tsing Sha Highway Aberdeen Tunnel Lantau Toll Plaza Tuen Mun Road [The scene changes. At a corner of the bus interchange, a man who is about to light up a cigarette sees the “No Smoking” signage. He quickly puts his cigarette back to the packaging.] Voice-over: “No Smoking” signage is prominently displayed. Offenders are subject to a fixed penalty of $1,500. W3C Text Description TV API - “Extension of Statutory No-smoking Areas at Bus Interchanges (Post-version)” (Ref No: MD 305) Super: Offenders are subject to a fixed penalty of $1,500 [The scene changes. -

Head 6 — ROYALTIES and CONCESSIONS
Head 6 — ROYALTIES AND CONCESSIONS Details of Revenue Sub- Actual Original Revised head revenue estimate estimate Estimate (Code) 2017–18 2018–19 2018–19 2019–20 ————— ————— ————— ————— $’000 $’000 $’000 $’000 020 Quarries and mining ........................................... 129,433 95,813 98,146 94,133 030 Bridges and tunnels ............................................ 2,301,464 2,775,043 2,466,554 2,512,884 070 Petrol filling ....................................................... 2,126 2,104 2,353 2,376 100 Parking ............................................................... 434,075 425,890 453,202 468,498 170 Vehicle examination .......................................... 50,044 53,391 51,431 51,431 201 Slaughterhouse concessions ............................... 29,001 28,300 28,447 28,447 202 Other royalties and concessions ......................... 295,814 296,492 303,715 345,475 ————— ————— ————— ————— Total ........................................................ 3,241,957 3,677,033 3,403,848 3,503,244 Description of Revenue Sources This revenue head covers royalties payable by franchised companies, revenue from government car parks, bridges and tunnels, petrol filling stations and various other royalties and concessions. Subhead 020 Quarries and mining covers royalties from quarry contracts and mining leases. Subhead 030 Bridges and tunnels covers royalties from the Tate’s Cairn Tunnel on or before 10 July 2018 and Discovery Bay Tunnel; revenue from Route 8 between Cheung Sha Wan and Sha Tin; and concessions payable by contractors assuming management responsibilities for the Aberdeen Tunnel, Kai Tak Tunnel, Lion Rock Tunnel, Shing Mun Tunnels, Tseung Kwan O Tunnel, the Tsing Ma Control Area, the Cross-Harbour Tunnel, the Eastern Harbour Crossing, and with effect from 11 July 2018, the Tate’s Cairn Tunnel. Subhead 070 Petrol filling covers royalties from three petrol filling stations of oil companies in Hong Kong. -

Town Planning Board Paper No. 10304
TPB Paper No. 10304 For consideration by the Town Planning Board on 21.7.2017 CONSIDERATION OF REPRESENTATIONS NO. R1 TO R7 AND COMMENT NO. C1 IN RESPECT OF THE DRAFT KOWLOON TONG OUTLINE ZONING PLAN NO. S/K18/20 Subject of Representations Representers Commenter (No. TPB/R/S/K18/20-R1 to R7) (No. TPB/R/S/K18/20-C1) Total: 7 Total: 1 Amendment Item A Oppose (7) Support R1, R3 and R6 (1) Rezoning a piece of land near R1: Green Sense C1: Individual the junction of Lung Cheung R2 to R7: Individuals Road and Lion Rock Tunnel Road from “Green Belt” (“GB”) to “Residential (Group C) 11” (“R(C)11”) Amendment Item B1 Rezoning of a strip of land abutting the northern kerb of Lung Cheung Road from “GB” to an area shown as ‘Road’ Amendment Item B2 Rezoning of a strip of land abutting the southern kerb of Lung Cheung Road from “GB” to an area shown as ‘Road’ Amendments (a) and (b) to Oppose (1) the Notes of the Plan R6: Individual Revision to the Remarks of the Notes for the “R(C)” zone to incorporate plot ratio (PR) and building height (BH) restrictions for the “R(C)11” sub-zone and allow for minor relaxation of the BH restriction 1. Introduction 1.1 On 13.1.2017, the draft Kowloon Tong Outline Zoning Plan No. S/K18/20 (the Plan) (Annex I) was exhibited for public inspection under section 5 of the Town Planning Ordinance (the Ordinance). The amendments are set out in the Schedule of Amendments at Annex II. -

CAPITAL WORKS RESERVE FUND (Payments)
CAPITAL WORKS RESERVE FUND (Payments) Sub- Approved Actual Revised head project expenditure estimate Estimate (Code) Approved projects estimate to 31.3.2001 2001–02 2002–03 ————— ————— ————— ————— $’000 $’000 $’000 $’000 Head 708—Capital Subventions and Major Systems and Equipment Capital Subventions Education Subventions Primary 8008EA Development of Fung Kai Public School at Jockey Club Road, Sheung Shui...................................................... Cat. B — — 49† 8013EA Redevelopment of Heep Yunn Primary School at No. 1 Farm Road, Kowloon .............................................. 63,350 14,932 40,450 5,500 8015EA Extension to St. Mary’s Canossian School at 162 Austin Road, Kowloon . 71,300 — 10,240 38,649 8016EA Redevelopment of the former premises of The Church of Christ in China Chuen Yuen Second Primary School at Sheung Kok Street, Kwai Chung..... 83,200 — 5,230 63,750 8017EA Redevelopment of La Salle Primary School at 1D La Salle Road, Kowloon .............................................. 160,680 18,400 63,422 68,860 8018EA A 30-classroom primary school in Diocesan Boy’s School campus at 131 Argyle Street, Kowloon................ 129,100 — 18,400 81,700 8019EA Redevelopment of Yuen Long Chamber of Commerce Primary School, Yuen Long..................................................... Cat. B — — 13,430† 8020EA Baptist University affiliated school and fire station............................................ Cat. B — — 46,360† 8021EA Redevelopment of Wong Chan Sook Ying Memorial School, Yuen Long .... Cat. B — — 12,500† 8022EA Capital grant for a 24-classroom private independent school in Yau Yat Chuen, Kowloon.................................. Cat. B — — 5,000† Secondary 8014EB St. Peter’s Secondary School ................... 7,865 7,452 100 226 8015EB St. Stephen’s Girls’ College..................... 13,207 12,528 100 542 8024EB Church of Christ in China Prevocational School at Tuen Mun ........................... -

Head 6 — ROYALTIES and CONCESSIONS
Head 6 — ROYALTIES AND CONCESSIONS Details of Revenue Sub- Actual Original Revised head revenue estimate estimate Estimate (Code) 2016–17 2017–18 2017–18 2018–19 ————— ————— ————— ————— $’000 $’000 $’000 $’000 020 Quarries and mining ........................................... 112,461 101,762 106,266 95,813 030 Bridges and tunnels ............................................ 1,989,105 2,299,888 2,295,621 2,775,043 070 Petrol filling ....................................................... 1,758 2,094 2,069 2,104 080 Taxi concessions ................................................ 141,076 — — — 100 Parking ............................................................... 433,717 418,046 424,936 425,890 170 Vehicle examination .......................................... 33,670 49,871 53,391 53,391 201 Slaughterhouse concessions ............................... 28,087 28,009 28,300 28,300 202 Other royalties and concessions ......................... 7,946,526 295,516 295,406 296,492 ————— ————— ————— ————— Total ........................................................ 10,686,400 3,195,186 3,205,989 3,677,033 Description of Revenue Sources This revenue head covers royalties payable by franchised companies, revenue from government car parks, bridges and tunnels, petrol filling stations and various other royalties and concessions. Subhead 020 Quarries and mining covers royalties from quarry contracts and mining leases. Subhead 030 Bridges and tunnels covers royalties from the Tate’s Cairn Tunnel and Discovery Bay Tunnel; revenue from Route 8 between Cheung Sha Wan and Sha Tin; and concessions payable by contractors assuming management responsibilities for the Aberdeen Tunnel, Kai Tak Tunnel, Lion Rock Tunnel, Shing Mun Tunnels, Tseung Kwan O Tunnel, the Tsing Ma Control Area, the Cross-Harbour Tunnel, the Eastern Harbour Crossing, and with effect from July 2018, the Tate’s Cairn Tunnel. Subhead 070 Petrol filling covers royalties from three petrol filling stations of oil companies in Hong Kong. -

THB(T)CR 2/4651/83 LEGISLATIVE COUNCIL BRIEF Road Tunnels
File Ref. : THB(T)CR 2/4651/83 LEGISLATIVE COUNCIL BRIEF Road Tunnels (Government) Ordinance (Chapter 368) Eastern Harbour Crossing Ordinance (Chapter 215) Tate’s Cairn Tunnel Ordinance (Chapter 393) Interpretation and General Clauses Ordinance (Cap. 1) Tsing Ma Control Area Ordinance (Cap. 498) TUNNEL-RELATED SUBSIDIARY LEGISLATION AMENDMENTS AND SPECIFICATION NOTICE INTRODUCTION At the meeting of the Executive Council on 12 May 2009, the Council ADVISED and the Chief Executive ORDERED that – (a) the Road Tunnels (Government) (Amendment) Regulation 2009, at Annex A, should be made under section 20 of the Road Tunnels (Government) Ordinance; (b) the Eastern Harbour Crossing Road Tunnel (Amendment) Regulation 2009, at Annex B, should be made under section 43 of the Eastern Harbour Crossing Ordinance; (c) the Tate’s Cairn Tunnel (Amendment) Regulation 2009, at Annex C, should be made under section 24 of the Tate’s Cairn Tunnel Ordinance; and (d) the Specification of Public Office Notice 2009, at Annex D, should be made under section 43 of the Interpretation and General Clauses Ordinance. 2 2. The Secretary for Transport and Housing (STH), in exercise of the power under section 27(2) of the Tsing Ma Control Area Ordinance, has also made the Tsing Ma Control Area (General) (Amendment) Regulation 2009 at Annex E. BACKGROUND AND JUSTIFICATIONS Standardisation of autotoll signage and marking 3. Currently, various tolled tunnels/bridge use different signage for autotoll lanes and booths. It is desirable to standardise such signage for all tunnels/bridge with autotoll facilities to assist motorists in getting into the right lanes before arriving at the appropriate toll booth. -

Hong Kong: the Facts
Transport Every day, about 8.93 million passenger journeys are Public Light Buses (PLBs) are minibuses with not more made on a public transport system which includes railways, than 19 seats. Their number is fixed at a maximum of 4 350 trams, buses, minibuses, taxis and ferries in 2020. vehicles. Some PLBs are used for scheduled services (green There are about 373 licensed vehicles for every kilometre minibuses) and others for non-scheduled services (red of road, and the topography makes it increasingly difficult to minibuses). provide additional road capacity in the heavily built-up areas. Red minibuses are free to operate anywhere, except where special prohibitions apply, without fixed routes or fares. By end Buses and Minibuses: By end December 2020, the Kowloon December 2020, there are 1 009 red minibuses. Motor Bus Company (1933) Limited (KMB) operates 359 bus Green minibuses operate on fixed routes and frequencies routes in Kowloon and the New Territories and 65 cross- at fixed prices. By end December 2020, there are 67 main harbour routes. Fares range from $3.2 to $13.4 for urban green minibus routes on Hong Kong Island, 82 in Kowloon and routes, from $2 to $46.5 for the New Territories routes and 211 in the New Territories, employing a total of 3 341 vehicles. from $8.8 to $39.9 for the cross-harbour routes. Red minibuses carry about 183 300 passengers a day, while With a fleet of 3 997 licensed air-conditioned buses, mostly green minibuses carry about 1 116 200 passengers daily Note double-deckers, KMB is one of the largest road passenger 2. -

LCQ4: Automatic Toll Collection System of Tolled Tunnels and Roads *************************************************
LCQ4: Automatic toll collection system of tolled tunnels and roads ************************************************* Following is a question by the Hon Chan Kam-lam and a reply by the Secretary for Transport and Housing, Ms Eva Cheng, at the Legislative Council meeting today (June 29): Question: According to the information of the Transport Department, the overall utilisation rate in February 2011 of the Autotoll toll collection system (Autotoll) at tolled tunnels and roads was only 47%, and that the Autotoll utilisation rate at the Cross Harbour Tunnel in Hung Hom was only 39%. Quite a number of drivers have reflected that owing to insufficient provision of Autotoll lanes at the cross harbour tunnels, there are often long vehicle queues and some drivers who have already opened an account with Autotoll are therefore forced to give up using such lanes and switch to using manual toll booths where the queues are shorter, and thus the automatic toll collection system at the tunnels fails to achieve the effect of easing traffic flow. In this connection, will the Government inform this Council: (a) whether the authorities have conducted a review on the aforesaid situation, including re-assessing the number of Autotoll lanes available at various tunnels; if they have, of the situation; (b) whether the authorities have conducted a study on how to facilitate the enhancement of the Autotoll utilisation rate so that the automatic toll collection system can achieve a greater effect in easing traffic flow; and (c) given the serious traffic congestion -
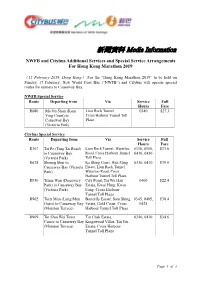
NWFB and Citybus Additional Services and Special Service Arrangements for Hong Kong Marathon 2019
NWFB and Citybus Additional Services and Special Service Arrangements For Hong Kong Marathon 2019 (15 February 2019, Hong Kong) For the “Hong Kong Marathon 2019” to be held on Sunday, 17 February, New World First Bus (“NWFB”) and Citybus will operate special routes for runners to Causeway Bay. NWFB Special Service Route Departing from Via Service Full Hours Fare R680 Ma On Shan (Kam Lion Rock Tunnel, 0340 $27.3 Ying Court) to Cross Harbour Tunnel Toll Causeway Bay Plaza (Victoria Park) Citybus Special Service Route Departing from Via Service Full Hours Fare R307 Tai Po (Ting Tai Road) Lion Rock Tunnel, Waterloo 0330, 0350, $33.6 to Causeway Bay Road, Cross Harbour Tunnel 0410, 0430 (Victoria Park) Toll Plaza R678 Sheung Shui to Ka Shing Court, Wah Ming 0330, 0410 $39.9 Causeway Bay (Victoria Estate, Lion Rock Tunnel, Park) Waterloo Road, Cross Harbour Tunnel Toll Plaza R930 Tsuen Wan (Discovery City Point, Tai Wo Hau 0400 $22.4 Park) to Causeway Bay Estate, Kwai Hing, Kwai (Victoria Park) Fong, Cross Harbour Tunnel Toll Plaza R962 Tuen Mun (Lung Mun Butterfly Estate, Sam Shing 0345, 0405, $30.4 Oasis) to Causeway Bay Estate, Gold Coast, Cross 0425 (Moreton Terrace) Harbour Tunnel Toll Plaza R969 Tin Shui Wai Town Tin Chak Estate, 0340, 0410 $34.6 Centre to Causeway Bay Kingswood Villas, Tin Yiu (Moreton Terrace) Estate, Cross Harbour Tunnel Toll Plaza Page 1 of 3 On the event day, there will be road closures in Causeway Bay, Central, Wan Chai, Island Eastern Corridor, Tsim Sha Tsui, Jordan, the southbound of West Kowloon Highway and Western Harbour Crossing and the bound for downtown of Ting Kau Bridge, Cheung Tsing Tunnel, Nam Wan Tunnel and Stonecutters Bridge.