Active River Area
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Planetary Geologic Mappers Annual Meeting
Program Lunar and Planetary Institute 3600 Bay Area Boulevard Houston TX 77058-1113 Planetary Geologic Mappers Annual Meeting June 12–14, 2018 • Knoxville, Tennessee Institutional Support Lunar and Planetary Institute Universities Space Research Association Convener Devon Burr Earth and Planetary Sciences Department, University of Tennessee Knoxville Science Organizing Committee David Williams, Chair Arizona State University Devon Burr Earth and Planetary Sciences Department, University of Tennessee Knoxville Robert Jacobsen Earth and Planetary Sciences Department, University of Tennessee Knoxville Bradley Thomson Earth and Planetary Sciences Department, University of Tennessee Knoxville Abstracts for this meeting are available via the meeting website at https://www.hou.usra.edu/meetings/pgm2018/ Abstracts can be cited as Author A. B. and Author C. D. (2018) Title of abstract. In Planetary Geologic Mappers Annual Meeting, Abstract #XXXX. LPI Contribution No. 2066, Lunar and Planetary Institute, Houston. Guide to Sessions Tuesday, June 12, 2018 9:00 a.m. Strong Hall Meeting Room Introduction and Mercury and Venus Maps 1:00 p.m. Strong Hall Meeting Room Mars Maps 5:30 p.m. Strong Hall Poster Area Poster Session: 2018 Planetary Geologic Mappers Meeting Wednesday, June 13, 2018 8:30 a.m. Strong Hall Meeting Room GIS and Planetary Mapping Techniques and Lunar Maps 1:15 p.m. Strong Hall Meeting Room Asteroid, Dwarf Planet, and Outer Planet Satellite Maps Thursday, June 14, 2018 8:30 a.m. Strong Hall Optional Field Trip to Appalachian Mountains Program Tuesday, June 12, 2018 INTRODUCTION AND MERCURY AND VENUS MAPS 9:00 a.m. Strong Hall Meeting Room Chairs: David Williams Devon Burr 9:00 a.m. -

On the Horton-Strahler Number for Random Tries Informatique Théorique Et Applications, Tome 30, No 5 (1996), P
INFORMATIQUE THÉORIQUE ET APPLICATIONS L. DEVROYE P. KRUSZEWSKI On the Horton-Strahler number for random tries Informatique théorique et applications, tome 30, no 5 (1996), p. 443-456 <http://www.numdam.org/item?id=ITA_1996__30_5_443_0> © AFCET, 1996, tous droits réservés. L’accès aux archives de la revue « Informatique théorique et applications » im- plique l’accord avec les conditions générales d’utilisation (http://www.numdam. org/conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit contenir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ Informatique théorique et Applications/Theoretical Informaties and Applications (vol. 30, n° 5, 1996, pp. 443-456) ON THE HORTON-STRAHLER NUMBER FOR RANDOM TRIES (*) by L. DEVROYE (*) and P. KRUSZEWSKI (2) Communicated by A. ARNOLD Abstract. - We consider random tries constructedfrom n i.i.d. séquences of independent Bernoulli (p) random variables, 0 < p < 1. We study the Horton-Strahler number Hn, and show that l0ëmin(p,l-p) in probability as n —*• oo. Keywords: Horton-Strahler number, trie, probabilistic analysis, data structures, random trees. Résumé. - On étudie des arbres aléatoires du type « trie » construits à partir de n suites indépendantes de variables aléatoires Bernoulli (p) où 0 < p < 1. On prouve que Hn 1 en probabilité, où Hn est le nombre de Horton-Strahler. INTRODUCTION In 1960, Fredkin [9] coined the term trie for an efficient data structure to store and vetrieve strings. These were further developed and modified by Knuth [4], Larson [16], Fagin, Nievergelt, Pippenger and Strong [6], Litwin [17], Aho, Hopcroft and Ullman [1] and others. -
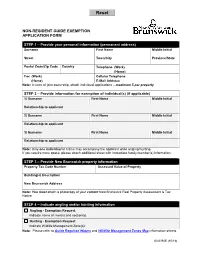
Non-Resident Guide Exemption Application Form
NON-RESIDENT GUIDE EXEMPTION APPLICATION FORM STEP 1 – Provide your personal information (permanent address) Surname First Name Middle Initial Street Town/City Province/State Postal Code/Zip Code Country Telephone (Work) (Home) Fax (Work) Cellular Telephone (Home) E-Mail Address Note: In case of joint ownership, attach individual applications – maximum 5 per property STEP 2 – Provide information for exemption of individual(s) (if applicable) 1) Surname First Name Middle Initial Relationship to applicant 2) Surname First Name Middle Initial Relationship to applicant 3) Surname First Name Middle Initial Relationship to applicant Note: Only one individual at a time may accompany the applicant while angling/hunting. If you require more space, please attach additional sheet with immediate family member(s) information. STEP 3 – Provide New Brunswick property information Property Tax Code Number Assessed Value of Property Building(s) Description New Brunswick Address Note: You must attach a photocopy of your current New Brunswick Real Property Assessment & Tax Notice STEP 4 – Indicate angling and/or hunting information Angling - Exemption Request Indicate name of river(s) and section(s). Hunting - Exemption Request Indicate Wildlife Management Zone(s). Note: Please refer to Guide Required Waters and Wildlife Management Zones Map information sheets 60-6392E (10/18) STEP 5 – Indicate your application method Option A Option B Option C Application by mail Application by fax Application in person at ERD, Fish & Wildlife Branch STEP 6 – Indicate your payment method Annual fee of $150 Canadian Funds (no tax) Check only one box. Cash Cheque Money Order Visa MasterCard Note: Do not send cash by mail. Please make cheque or money order payable in the amount of $150 Canadian Funds to the Minister of Finance, Province of New Brunswick. -

ATLANTIC SALMON INTEGRATED MANAGEMENT PLAN 2008-2012 GULF REGION Adult
ATLANTIC SALMON INTEGRATED MANAGEMENT PLAN 2008-2012 GULF REGION Adult Smolt Spawning Eggs Parr Eyed Eggs Fry Alevin Did you know that… • Salmon eggs are spawned in freshwater during the fall, incubate during the winter, and hatch in the spring. • Eggs hatch as fry and develop into parr over their first 2-4 years of life in freshwater. • Parr develop into smolts which leave their freshwater environment in the spring and migrate to the ocean. • Smolts that grow in the ocean for 1 year before they return to their native rivers to spawn are called grilse but smolts that grow in the ocean for 2 or more years before returning to spawn are called salmon. • After spawning in the fall, salmon and grilse are called kelts or black salmons and remain in rivers under the cover of ice until spring at which time they return to the ocean environment. • Salmon and grilse can spawn multiple times during their life. ATLANTIC SALMON INTEGRATED MANAGEMENT PLAN GULF REGION PLAN OVERVIEW The future well-being of the Atlantic salmon resource depends upon all parties working together through an integrated approach and in a harmonized manner. The Atlantic Salmon Integrated Management Plan for the Gulf Region is a five-year plan designed to engage the parties interested in the sustainable and orderly management of Atlantic salmon. It aim at strengthening their participation and to improve communications towards this endeavour. Engagement of the public and its community representatives should lead to better predictability and transparency in the decision making process. It is also meant to be an umbrella plan that allows for an adaptive and inclusive management approach based on the stakeholders' capacity. -

Terrain Generation Using Procedural Models Based on Hydrology Jean-David Genevaux, Eric Galin, Eric Guérin, Adrien Peytavie, Bedrich Benes
Terrain Generation Using Procedural Models Based on Hydrology Jean-David Genevaux, Eric Galin, Eric Guérin, Adrien Peytavie, Bedrich Benes To cite this version: Jean-David Genevaux, Eric Galin, Eric Guérin, Adrien Peytavie, Bedrich Benes. Terrain Genera- tion Using Procedural Models Based on Hydrology. ACM Transactions on Graphics, Association for Computing Machinery, 2013, 4, 32, pp.143:1-143:13. 10.1145/2461912.2461996. hal-01339224 HAL Id: hal-01339224 https://hal.archives-ouvertes.fr/hal-01339224 Submitted on 7 Apr 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Terrain Generation Using Procedural Models Based on Hydrology Jean-David Genevaux´ 1 Eric´ Galin1* Eric´ Guerin´ 1 Adrien Peytavie1 Bedrichˇ Benesˇ2 1 Universite´ de Lyon, LIRIS, CNRS, UMR5205, France 2 Purdue University, USA ABCD Terrain slope control River slope control Figure 1: A) The shape of a terrain is defined by a terrain patch and two functions that control the slope of rivers and valleys. B) The river network is automatically calculated and C,D) all inputs are then used to generate the continuous terrain conforming to rules from hydrology. Abstract element of the scene, or it plays a central part in the application. -

Update of Indicators to 2017 of Adult Atlantic Salmon for the Miramichi River
Canadian Science Advisory Secretariat Gulf Region Science Response 2017/043 UPDATE OF INDICATORS TO 2017 OF ADULT ATLANTIC SALMON FOR THE MIRAMICHI RIVER (NB), SALMON FISHING AREA 16, DFO GULF REGION Context The last assessment of stock status of Atlantic Salmon (Salmo salar) for Fisheries and Oceans Canada (DFO) Gulf Region was completed after the 2013 return year (DFO 2014) and updates on stock status for each of the four Salmon Fishing Areas (SFA 15-18) were prepared in 2014, 2015, and 2016 (DFO 2015a; DFO 2015b; DFO 2016; DFO 2017). DFO Fisheries and Aquaculture Management requested an update of the status of the Atlantic Salmon stock in the Miramichi River for 2017. Indicators for adult Atlantic Salmon for the Miramichi River are provided in this report. This Science Response Report results from the Science Response peer review meeting held in Moncton (N.B.) on December 19, 2017. No other publications will be produced from this science response process. Background All rivers flowing into the southern Gulf of St. Lawrence are included in DFO Gulf Region. Atlantic Salmon (Salmo salar) management areas in DFO Gulf Region are defined by four salmon fishing areas (SFA 15 to 18) encompassing portions of New Brunswick, Nova Scotia, and all of Prince Edward Island (Fig.1). The Miramichi River is the largest river in SFA 16 and DFO Gulf Region. Figure 1. Salmon Fishing Areas in the DFO Gulf Region. For management purposes, Atlantic Salmon are categorized as small salmon (grilse; fish with a fork length less than 63 cm) and large salmon (fish with a fork length equal to or greater than 63 cm). -
Application of the Canadian Aquatic Biomonitoring Network (CABIN)
Application of the Canadian Aquatic Biomonitoring Network (CABIN) The Miramichi River Environmental Assessment Committee Synopsis 2015 Application of the Canadian Aquatic Biomonitoring Network (CABIN) Synopsis 2015 Vladimir King Trajkovic Miramichi River Environmental Assessment Committee PO Box 85, 21 Cove Road Miramichi, New Brunswick E1V 3M2 Phone: (506) 778-8591 Fax: (506) 773-9755 Email: [email protected] Website: www.mreac.org March 8, 2016 ii Acknowledgements The Miramichi River Environmental Assessment Committee (MREAC) would like to thank Environment Canada (EC) for their support through the Atlantic Ecosystem Initiative for the Canadian Aquatic Biomonitoring Network (CABIN) project titled “The Atlantic Provinces Canadian Aquatic Biomonitoring Network (CABIN) Collaborative”. A special thank you is also extended to Lesley Carter and Vincent Mercier for their support and training during this endeavour. iii Table of Contents Page 1.0 Introduction ............................................................................................................................1 2.0 Background.............................................................................................................................2 3.0 Results ....................................................................................................................................6 4.0 Discussion.............................................................................................................................20 5.0 Conclusion ............................................................................................................................22 -

A Literary and Historical Atlas of America
EVERYMAN .1 WILL? GO V-* ~~^--m^r >* IN THY MOST NEED THEE & BE THY GUIDE O GO BY THY SIDE ^OVyfcxvJL Presented to the LIBRARY of the UNIVERSITY OF TORONTO by Sybille Pantazzi EVERYMAN'S LIBRARY EDITED BY ERNEST RHYS REFERENCE A L I TE R A R Y AND HISTORICAL ATLAS OF NORTH & SOUTH AMERICA THE PUBLISHERS OF LlBT^ATty WILL BE PLEASED TO SEND FREELY TO ALL APPLICANTS A LIST OF THE PUBLISHED AND PROJECTED VOLUMES TO BE COMPRISED UNDER THE FOLLOWING THIRTEEN HEADINGS: TRAVEL ^ SCIENCE ^ FICTION THEOLOGY & PHILOSOPHY HISTORY ^ CLASSICAL FOR YOUNG PEOPLE ESSAYS $ ORATORY POETRY & DRAMA BIOGRAPHY REFERENCE ROMANCE IN FOUR STYLES OF BINDING; CLOTH, FLAT BACK, COLOURED TOP; LEATHER, ROUND CORNERS, GILT TOP; LIBRARY BINDING IN CLOTH, & QUARTER PIGSKIN LONDON: J. M. DENT & SONS, LTD. NEW YORK: E. P. DUTTON & CO. I ALITERARYS HISTORICAL ATLAS OF AMERICA? J G.BARTHOLOMEW LL.D LONLON:PUBL4SHED hyJMDENTS-SONS^ ANP IN NEW YORK BYE-P DUTTONSCO / INTRODUCTION WHEN General Hamilton spoke in the Federalist over a " century ago of an empire, in many respects the most inter- esting in the world," meaning the United States of America, he did not, he could not, foresee the vast growth of his country and its northern and southern neighbours which this book portrays. The volume is the third in a series of small atlases, meant to cover in turn the whole globe, and to do it in a way to knit up geographical and historical knowledge with the facts of commerce and the literary record of each land or region. One chief purpose of these maps is to trace clearly " the development of the United States, beginning with the " most remarquable parts of the New England of the Pilgrim Fathers, described by Captain John Smith in 1614, and not forgetting the territories of the old American-Indian nations. -

Stock Status of Atlantic Salmon in the Miramishi River, 1995
Not to be cited without Ne pas citer sans permission of the authors' autori sation des auteurs ' DFO Atlantic Fisheries MPO Pêches de l'Atlantique Research Document 96/124 Document de recherche 96/124 Stock status of Atlantic salmon (Salmo salar) in the Miramichi River, 1995 by G. Chaput, M. Biron, D. Moore, B. Dube2, C. Ginnish', M. Hambrook, T. Paul`, and B . Scott Dept. of Fisheries and Oceans Science Branch P.O. Box 5030 Moncton, NB E 1 C 9B6 'New Brunswick Dept . of Natural Resources and Energy Miramichi, NB 'Eel Ground First Nations Eel Ground, N B 4 Red Bank First Nations Red Bank, NB 'This series documents the scientific basis 'La présente série documente les bases for the evaluation of fisheries resources in scientifiques des évaluations des ressources Atlantic Canada . As such, it addresses the halieutiques sur la côte atlantique du issues of the day in the time frames required Canada. Elle traite des problèmes courants and the documents it contains are not selon les échéanciers dictés . Les documents intended as definitive statements on the qu'elle contient ne doivent pas être subjects addressed but rather as progress considérés comme des énoncés définitifs sur reports on ongoing investigations. les sujets traités, mais plutôt comme des rapports d'étape sur les études en cours . Research documents are produced in the Les Documents de recherche sont publiés official language in which they are provided dans la langue officielle utilisée dans le to the secretariat . manuscrit envoyé au secrétariat . 2 TABLE OF CONTENTS ABSTRACT . .. .. .... .... .. .. .. .. .. ... .. ... ... .... .. ... .... .. 3 SUMMARY SHEETS . .... ... .. ...... .... .. .... .... ... .... ... ... .... ..4 INTRODUCTION . ... .... .... ... .... .. ... .... .... ... .... .. ... 7 DESCRIPTION OF FISHERIES . -

Maritime Provinces Fishery Regulations Règlement De Pêche Des Provinces Maritimes TABLE of PROVISIONS TABLE ANALYTIQUE
CANADA CONSOLIDATION CODIFICATION Maritime Provinces Fishery Règlement de pêche des Regulations provinces maritimes SOR/93-55 DORS/93-55 Current to September 11, 2021 À jour au 11 septembre 2021 Last amended on May 14, 2021 Dernière modification le 14 mai 2021 Published by the Minister of Justice at the following address: Publié par le ministre de la Justice à l’adresse suivante : http://laws-lois.justice.gc.ca http://lois-laws.justice.gc.ca OFFICIAL STATUS CARACTÈRE OFFICIEL OF CONSOLIDATIONS DES CODIFICATIONS Subsections 31(1) and (3) of the Legislation Revision and Les paragraphes 31(1) et (3) de la Loi sur la révision et la Consolidation Act, in force on June 1, 2009, provide as codification des textes législatifs, en vigueur le 1er juin follows: 2009, prévoient ce qui suit : Published consolidation is evidence Codifications comme élément de preuve 31 (1) Every copy of a consolidated statute or consolidated 31 (1) Tout exemplaire d'une loi codifiée ou d'un règlement regulation published by the Minister under this Act in either codifié, publié par le ministre en vertu de la présente loi sur print or electronic form is evidence of that statute or regula- support papier ou sur support électronique, fait foi de cette tion and of its contents and every copy purporting to be pub- loi ou de ce règlement et de son contenu. Tout exemplaire lished by the Minister is deemed to be so published, unless donné comme publié par le ministre est réputé avoir été ainsi the contrary is shown. publié, sauf preuve contraire. ... [...] Inconsistencies in -
Annual Moncton Dinner
THE ATLANTIC SALMON FEDERATION AND THE NEW BRUNSWICK SALMON COUNCIL Annual Moncton Dinner SATURDAY MARCH 30 TH , 2019 DELTA BEAUSÉJOUR Funds raised at this event will be used to support conservation work and research on New Brunswick Rivers. This critical effort to uncover the causes of salmon mortality takes place thanks to volunteers from the New Brunswick Salmon Council, Atlantic Salmon Federation and our affiliates. corporate partners auction terms 1. payment of cash, cheque, Visa, mastercard or american express must be made tonight unless prior arrangements have been made with the VALMONT ROBICHAUD Dinner chairman. 2. title of merchandise remains with asF until purchases by cheque have been cleared. 3. in the case of a disputed bid, the bid will be re- opened at the discretion of the auctioneer, whose decision is final. 4. Bidders must sign acknowledgement upon sale of item. 5. asF reserves the right to withdraw any item with a minimum or reserve bid, should the minimum not be met. 6. unless otherwise specified, all trips and items of a personal nature must be utilized within one year of the auction; must be taken in accordance with the auction description and do not include airfare and gratuities. 7. sales are final. While we endeavor to obtain quality fishing packages, no guarantee of water conditions or fishing success, expressed or implied is made by the atlantic salmon Federation or this catalogue. | 3| DINNER CO-CHAIRS: Dr. janice cormier François emonD DINNER COMMITTEE: Will Doyle neil johnston charles leBlanc DINNER HONOUREE: chris leger W. ROSS BINGHAM, Q.C. WarWick meaDus “It is not all of fishing to fish” Brian F.p. -

Grilse Returning to Bartholomew River Monitoring Facilities, 1961-83
1983 RESEARCH ON ANADROMOUS FISHES, GULF REGION E.M.P. Chadwick, D.R. Alexander, R.W. Gray, T.G. Lutzac, J.L. Peppar and R.G. Randall Canadian Department of Fisheries & Oceans Gulf Region Research Branch Freshwater & Anadromous Division P.O. Box 5030, Moncton, N.B. E1C 9B6 DECEMBER 1985 Canadian Technical Report of Fisheries and Aquatic Sciences No.1420 Canadian Technical Report of Fisheries and Aquatic Sciences Technical reports contain scientific and technical information that contributes to existing knowledge but which is not normally appropriate for primary literature. Technical reports are directed primarily toward a worldwide audience and have an international distribution. No restriction is placed on subject matter and the series reOects the broad interests and policies of the Department of Fisheries and Oceans, namely, fisheries an~ aquatic sciences. Technical reports may be cited as full publications. The correct citation appears above the abstract of each report. Each report is abstracted in Aqumic Sciences and Fisheries Abslfacls and indexed in the Department's annual index to scientific and technical publications. Numbers 1-456 in this series were issued as Technical Reports of the Fisheries Research Board of Canada. Numbers 457-714 were issued as Department of the Environment, Fisheries and Marine Service, Research and Development Directorate Technical Reports. Numbers 715 - 924 were issued as Department of Fisheries and the Environment, Fisheries and Marine Service Technical Reports. The current series name was changed with report number 925. Technical reports are produced regionally but are numbered nationally. Requests for individual reports will be filled by the issuing establishment listed on the front cover and title page.