Monday August 6, 2007
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Cambridge University Press 978-1-108-47926-4 — Rumor in the Early Chinese Empires Zongli Lu Index More Information
Cambridge University Press 978-1-108-47926-4 — Rumor in the Early Chinese Empires Zongli Lu Index More Information Index abnormal/abnormalities The Blue Sky is dead; the Yellow Sky will decorations and writings, 201 stand, 84–85, 170, 289, 293, 309 disasters, 20–21, 31 Bo, Lady (Empress Dowager), 247–248 heading west, 35 Book of Changes, 50, 68, 103–105 physical characteristics, 181 Book of Documents,8–9, 11, 58, 118, 295 as portentous, 46–52 Book of Great Peace, with Green Headings,84 speech characteristics, 106, 286 Book of Odes, 17, 25–26, 58, 111 of state’s governance, 106 supernatural entities, 293–294 Cai Shu, 9, 11–16, 18, 43 weather, 217 Cai Yong, 85, 166 acceptance (of the people/by the people), Calendar of the Heavenly Official Scripture of 17–23, 283, 291 Great Peace with the Embodiment of the Accounts Clerks, 156, 302 Origin,79–84, 177–178 Ai, Emperor. see Liu Xin Cao Cao, 167–168, 214 Ai Zhang, 183–184, 188 Cao San, 112, 121–122 air currents, 173–176, 215, 217, 249–250, 252, central government supervision mechanism, 260–267, 290, 315 145–150 Allport, Gordon W., vii–viii, 306 Chao Fulin, 171 alternative historical truths, xii Chen Dan, 167–168 An, Emperor. see Liu Hu Chen Fan, 31, 226 apocryphal-prophetic texts. see chen Chen Hsueh-Ping, 8 prophecies Chen Jun, 158 archaic history, 279–281 Chen Ping, 89, 127 aristocratic gossip, 2 chen prophecies authorities’ response to portentous talk, 87, auto-suggestive, 45, 170 318–319 belief in, 206–218 coded chen prophecies, 190–195 Bai Juyi, 14 curses and, 185–186 Ban Biao, 205 defined, -

Important Notice
IMPORTANT NOTICE THIS OFFERING IS AVAILABLE ONLY TO INVESTORS WHO ARE PERSONS OUTSIDE THE UNITED STATES. THE DISTRIBUTION OF THIS OFFERING MEMORANDUM IS LIMITED TO “PROFESSIONAL INVESTORS” ONLY AS DEFINED UNDER THE SECURITIES AND FUTURES ORDINANCE (CHAPTER 571 OF THE LAWS OF HONG KONG AND ANY RULES MADE UNDER THAT ORDINANCE); OR FOR A PERSON OUTSIDE HONG KONG, A PERSON TO WHOM SECURITIES MAY BE SOLD IN ACCORDANCE WITH A RELEVANT EXEMPTION FROM PUBLIC OFFER REGULATIONS IN THAT JURISDICTION. IMPORTANT: You must read the following before continuing. The following applies to the offering memorandum following this page, and you are therefore advised to read this carefully before reading, accessing or making any other use of the offering memorandum. In accessing the offering memorandum, you agree to be bound by the following terms and conditions, including any modifications to them any time you receive any information from us as a result of such access. NOTHING IN THIS ELECTRONIC TRANSMISSION CONSTITUTES AN OFFER OF SECURITIES FOR SALE OR THE SOLICITATION OF AN OFFER TO BUY SECURITIES IN ANY JURISDICTION WHERE IT IS UNLAWFUL TO DO SO. THE SECURITIES HAVE NOT BEEN, AND WILL NOT BE, REGISTERED UNDER THE U.S. SECURITIES ACT OF 1933, AS AMENDED (THE “SECURITIES ACT”), OR THE SECURITIES LAWS OF ANY STATE OF THE UNITED STATES OR OTHER JURISDICTION AND THE SECURITIES MAY NOT BE OFFERED, SOLD OR OTHERWISE TRANSFERRED WITHIN THE UNITED STATES (AS DEFINED IN REGULATION S UNDER THE SECURITIES ACT), EXCEPT PURSUANT TO AN EXEMPTION FROM, OR IN A TRANSACTION NOT SUBJECT TO, THE REGISTRATION REQUIREMENTS OF THE SECURITIES ACT AND APPLICABLE STATE OR LOCAL SECURITIES LAWS. -

1. Adaptive Moving Shadows Detection Using Local Neighboring
www.engineeringvillage.com Citation results: 500 Downloaded: 3/5/2018 1. Adaptive moving shadows detection using local neighboring information Wang, Bingshu (School of Electronic and Computer Engineering, Shenzhen Graduate School of Peking University, Shenzhen, China); Yuan, Yule; Zhao, Yong; Zou, Wenbin Source: Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), v 10117 LNCS, p 521-535, 2017, Computer Vision - ACCV 2016 Workshops, ACCV 2016 International Workshops, Revised Selected Papers Database: Compendex Compilation and indexing terms, Copyright 2018 Elsevier Inc. Data Provider: Engineering Village 2. Matrix completion based direction-of-Arrival estimation in nonuniform noise Liao, Bin (College of Information Engineering, Shenzhen University, Shenzhen; 518060, China); Guo, Chongtao; Huang, Lei; Wen, Jun Source: International Conference on Digital Signal Processing, DSP, p 66-69, March 1, 2017, Proceedings - 2016 IEEE International Conference on Digital Signal Processing, DSP 2016 Database: Compendex Compilation and indexing terms, Copyright 2018 Elsevier Inc. Data Provider: Engineering Village 3. Computing the personalized HRTFs based on weighted anthropometric parameters matching Yuan, Xiang (Shenzhen University, China); Zheng, Nengheng; Cai, Sudao Source: INTER-NOISE 2017 - 46th International Congress and Exposition on Noise Control Engineering: Taming Noise and Moving Quiet, v 2017- January, 2017, INTER-NOISE 2017 - 46th International Congress and -

Bulletin of the Swiss-Chinese Chamber of Commerce
CONTENTS K Editorial . 2 K Legal & Tax Matters Tax Update for Representative Offices and more . 88–90 K Anniversaries Practicing Swiss Lawyers Visit China . 91 Greeting Messages . 3–13 Amended State Compensation Law. 92–96 Bilateral Visits. 14–18 Efficient Market Access in China: CCC . .97–101 60th Anniversary of Bilateral Relations. 19–24 Chronologie der Volksrepublik China. 25 K News from Members Successful HR Management in China . 102–105 K Government News Groudbreaking for Swiss Data Center . 105–106 Significant Deepening of Bilateral Relationships. 26 SERV Insurance: Retain Liquidity, . 108–109 Top Chinese Legislator Visits Switzerland . 27–28 Realise Export Transactions Expo 2010 Shanghai – Swiss Highlights . 28–29 Credit Suisse in Greater China . 110–112 New Consul General in Guangzhou, . 30–31 The China Strategy . 113–115 Hong Kong, Zurich Schaffner Brings EMC-Filters and Power. 116–119 Quality Products K Chamber Mattters FHNW Celebrates 10 Years Global Know-how. 120–122 In a Mood for Celebrations . 32–33 Health and Wellbeing – Take the Best Only . 123–124 Founding Members, Presidents and Chapters . 34–35 of the Chamber K Swiss Watches Chronology and Actual List of Board Members . 36–39 First Titoni Artist Watch Launched . 126–128 Switzerland Trade & Investment Promotion . 40–41 Time Stops for Swatch Founder. 128–129 Sintra Skeleton Automatic . .129 K Environment Swiss Watch Brands with Rich History. .130 Cleantech Initiative Switzerland . 42–44 Green Production & Lifestyle in Shanghai . 44–46 K Readings & Exhibitions The SCS Opened its Machinery Center. 46–47 East and West – Need of Understanding . 131–134 Rauer Ton . 135–137 K Annual Reports Awards for Cuisine Book “Foodscape” . -
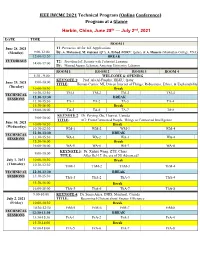
Technical Program for IWCMC 2020
IEEE IWCMC 2021 Technical Program (Online Conference) Program at a Glance Harbin, China, June 28th — July 2nd, 2021 DATE TIME ROOM 1 June 28, 2021 T1: Pervasive AI for IoT Applications (Monday) 9:00-12:00 By: A. Mohamed, M. Guizani (QU), A. Erbad (HBKU, Qatar), & A. Hussein (Manhattan College, USA) 12:00-13:30 BREAK TUTORIALS T2: Providing IoT Security with Federated Learning 14:00-17:00 By: Mourad Azzam, Lebanese American University, Lebanon ROOM 1 ROOM 2 ROOM 3 ROOM 4 8:30 - 9:00 WELCOME & OPENING KEYNOTE 1: Prof. Ala Al-Fuqaha, HBKU, Qatar 9:00-10:00 June 29, 2021 TITLE: Human-Centric ML Driven Internet of Things: Robustness, Ethics, & Explainability (Tuesday) 10:00-10:30 Break 10:30-12:30 TM-1 TM-2 TM-3 TM-4 TECHNICAL 12:30-13:30 BREAK SESSIONS 13:30-15:30 TA-1 TA-2 TA-3 TA-4 15:30-16:00 Break 16:00-18:00 TA-5 TA-6 TA-7 TA-8 KEYNOTE 2: Dr. Peiying Zhu, Huawei, Canada 9:00-10:00 TITLE: 6G: From Connected People, Things to Connected Intelligence June 30, 2021 10:00-10:30 Break (Wednesday) 10:30-12:30 WM-1 WM-2 WM-3 WM-4 12:30-13:30 BREAK TECHNICAL 13:30-15:30 WA-1 WA-2 WA-3 WA-4 SESSIONS 15:30-16:00 Break 16:00-18:00 WA-5 WA-6 WA-7 WA-8 KEYNOTE 3: Dr. Xinhui Wang, ZTE, China 9:00-10:00 TITLE: After Rel-17, the era of 5G Advanced? July 1, 2021 10:00-10:30 Break (Thursday) 10:30-12:30 ThM-1 ThM-2 ThM-3 ThM-4 TECHNICAL 12:30-13:30 BREAK SESSIONS 13:30-15:30 ThA-1 ThA-2 ThA-3 ThA-4 15:30-16:00 Break 16:00-18:00 ThA-5 ThA-6 ThA-7 ThA-8 9:00-10:00 KEYNOTE 4: Dr. -

Annual Meeting of the International Society of Electrochemistry I
Program of the 60th Annual Meeting of the International Society of Electrochemistry i The 60th Annual Meeting of the International Society of Electrochemistry Emerging Trends and Challenges in Electrochemistry August 16 to 21, 2009 Beijing, China PROGRAM ETY O CI F E O L S E C L T A R O N C O I H T E E A M M N N I R S E T T R Y N I • ii Program of the 60th Annual Meeting of the International Society of Electrochemistry International Society of Electrochemistry Rue de Sébeillon 9b 1004 Lausanne Switzerland Copyright © 2009 All rights reserved. No part of this work may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without prior written permission of the Publisher. No responsibility is assumed by the Publisher for any injury and/or damage to persons or property as a matter of product liability, negligence or otherwise, or from any use or operation of any methods, products, instructions or ideas contained in the material herein. Printed in China Program of the 60th Annual Meeting of the International Society of Electrochemistry iii Welcome Address On behalf of the organizing committee of the 60th Annual Meeting of the International Society of Electrochemistry, we warmly welcome you to Beijing and look forward to your participation in the meeting, from 16-21 August, 2009. The host city of Beijing is not only the capital city of China and its political, cultural, and scientific centre, but it is also one of the largest and most rapidly developing cities in the world. -
Global Think Tank Evaluation Report November 2015
Global Think Tank Evaluation Report 2015 Chinese Evaluation Center for Humanities and Social Sciences November 2015 Beijing Global Think Tank Evaluation Report November 2015 Project leader: Jing Linbo Project members: Wu Min, Jiang Qingguo Liu Xiaoxiao, Hu Wei, Yang Zhuoying, Shen Jinjian, Ma Ran, Liu Bingjie Wang Lili, Su Jinyan, Lu Wanhui, Geng Haiying, Yu Qian, Hao Ruoyang, Yang Fating, Xiang Junyong, Zhang Qingsong, Xu Jingyi, Hao Ming, Li Jun, Wu Bo, Zou Qingshan, Chen Yuanyuan, Feng Shouli, Hou Yixiong, He Yuqiong, Wang Chunhong, Li Yuying, Suo Jianci, Chen Yao, Lu Shanshan, Zhang Zhang Wang Limin, Zhou Qun, Li Wenzhen, Yao Xiaodan, Wang Ping, Liu Huachu, Yang Xue, Xue Xiaoying, Zhang Xiaoxi, Chu Guofei, Nan Yingshun Data collectors: Yang Min, Zhang Lin, Shao Yanan, Han Xü, Cao Yuanyuan, Hu Chun, Lin Zhiwei, Li Shuo, Wang Xiuzhong, Zheng Bugao, Yu Jiaying Contents 1. The definition of think tank .............................................................................. 1 2. The Comparative analysis of think tank evaluation methods ........................ 5 3. The AMI Index System for Comprehensive Evaluation of Global Think Tanks ................................................................................................................. 22 4.The global think tank ranking and the evaluation process ........................... 43 5.The construction of new type think tanks with Chinese characteristics under the global perspective ....................................................................................... 58 Appendix -

Visions of Buddhist Vinaya
Journal of Buddhist Ethics ISSN 1076-9005 http://www.buddhistethics.org/ Going Forth: Visions of Buddhist Vinaya Reviewed by Brian Nichols Department of Religious Studies Rice University [email protected] Copyright Notice: Digital copies of this work may be made and distributed provided no change is made and no alteration is made to the content. Reproduction in any other format, with the exception of a single copy for private study, requires the written permission of the author. All enquiries to: [email protected] Review of Going Forth: Visions of Buddhist Vinaya Brian Nichols* Going Forth: Visions of Buddhist Vinaya. Edited by William M. Bodiford. Honolulu: University of Hawai'i Press, 2005, x + 317 pages, ISBN: 0-8248-2787-2, US $48.00 (cloth). Monasticism has been a central feature of the Buddhist tradition from its founding in India to its present revival in China and spread to America. Given the importance of monasticism and the vinaya, the rules for living as a monk in a monastery, it is refreshing to find a volume dedicated to exploring this terrain. Going Forth is a collection of essays about the vi- naya, precepts, ordinations, penance rituals, monks and monasteries in China and Japan written by former students of Stanley Weinstein and presented in his honor. Given the nature of the volume, the connection between chapters is necessarily loose, bearing on disparate issues related to the vinaya and monasticism in China and Japan across time periods ranging from the fifth to the twentieth century. A brief introduction notes the central role traditionally ascribed to the vinaya as the instrument through which the Buddhist order is estab- lished and through which the Buddhist teachings are preserved and transmitted. -

Copyright © and Moral Rights for This Phd Thesis Are Retained by the Author And/Or Other Copyright Owners. a Copy Can Be Downlo
Shi, Longdu (2016) Buddhism and the state in medieval China : case studies of three persecutions of Buddhism, 444-846. PhD Thesis. SOAS, University of London. http://eprints.soas.ac.uk/id/eprint/23582 Copyright © and Moral Rights for this PhD Thesis are retained by the author and/or other copyright owners. A copy can be downloaded for personal non‐commercial research or study, without prior permission or charge. This PhD Thesis cannot be reproduced or quoted extensively from without first obtaining permission in writing from the copyright holder/s. The content must not be changed in any way or sold commercially in any format or medium without the formal permission of the copyright holders. When referring to this PhD Thesis, full bibliographic details including the author, title, awarding institution and date of the PhD Thesis must be given e.g. AUTHOR (year of submission) "Full PhD Thesis title", name of the School or Department, PhD PhD Thesis, pagination. Buddhism and the State in Medieval China: Case Studies of Three Persecutions of Buddhism, 444-846 Longdu SHI Thesis submitted for the degree of PhD 2016 Department of Religions and Philosophies SOAS, University of London I have read and understood regulation 17.9 of the Regulations for students of the SOAS, University of London concerning plagiarism. I undertake that all the material presented for examination is my own work and has not been written for me, in whole or in part, by any other person. I also undertake that any quotation or paraphrase from the published or unpublished work of another person has been duly acknowledged in the work which I present for examination. -

An Analysis of Chinese Talent Management Strategy: Emphasis on Cao Cao’S Competencies from the Records of the Three Kingdoms
AN ANALYSIS OF CHINESE TALENT MANAGEMENT STRATEGY: EMPHASIS ON CAO CAO’S COMPETENCIES FROM THE RECORDS OF THE THREE KINGDOMS LU KUICHENG A DISSERTATION SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF DOCTOR OF PHILOSOPHY IN HUMAN RESOURCE DEVELOPMENT DEPARTMENT OF INTERNATIONAL GRADUATE STUDIES IN HUMAN RESOURCE DEVELOPMENT FACULTY OF EDUCATION BURAPHA UNIVERSITY MAY 2018 COPYRIGHT OF BURAPHA UNIVERSITY ACKNOWLEDGEMENTS I wish to express my sincere gratitude to the many people who supported and helped me in the completion of this study. For my worthily principle advisor Associate Professor Dr.Chalong Tubsree, I send my heartfelt thanks for his patience and guidance in helping me. In the process of composing this paper, he gave me much academic and constructive advice, and helped me to correct my paper. Without his enlightening instruction, impressive kindness and patience, I could not have completed my thesis. His keen and vigorous academic observation enlightened me not only in this thesis but also in my future study. At the same time, I would like to express my appreciation to my Co-advisor, who gave me useful literature knowledge and information in this paper. She is Assist. Prof. Dr. Wilai Limthawaranun. I am very grateful for her patient guidance in the course of my thesis writing. Finally, I would like to thank the teachers who helped me during my entire study process in the International Graduate Studies Human Resource Development Center of Burapha University. Dr. Watunyoo Suwannaset, Dr. Chalermsri Chantarathong and Rattanasiri Khemraj in the IG-HRD office, thank you for taking care of me meticulously for the last three years. -

Como Parte Fundamental Del Compromiso De MANGO Con La
LISTA DE FÁBRICAS DE PRODUCCIÓN DE MANGO Como parte fundamental del compromiso de MANGO con la sostenibilidad MANGO da respuesta así al compromiso adquirido con CCOO Industria en es esencial establecer una gestión responsable de nuestra cadena de el “Acuerdo Bilateral Global para garantizar las normas internacionales en la suministro que, junto con la participación de determinados grupos de interés, cadena de suministro de MANGO” y a los requerimientos del Transparency contribuye a la transparencia y es clave en la debida diligencia hacia Pledge Standard, que insta a las marcas a hacer público el nombre, dirección nuestros proveedores. Priorizamos una relación de confianza con ellos, y otros detalles de las fábricas de producción. asegurando que están alineados con nuestros propios compromisos, Cabe destacar que MANGO no posee ninguna fábrica en propiedad y contribuyendo así a asegurar los derechos humanos de los trabajadores y a ninguna trabaja en exclusiva para nuestra organización. Algunas de ellas fortalecer la industria textil a nivel global. pueden utilizarse de forma discontinua en el tiempo en función de las Así pues, conscientes de la importancia de ser transparentes y de facilitar el características del producto por lo que la lista se actualizará mínimo dos acceso a la información para asegurar este compromiso, hacemos pública a veces al año. Asimismo, se irán ampliando progresivamente los datos través de nuestra página web la lista de fábricas de nivel 1 (tier 1) que han aportados sobre nuestra cadena de suministro. producido para MANGO en el presente año 2020. País Fábrica Dirección Ciudad Categoría Nº Empleados ALBANIA DONA ELEGANT SHPK Rruga Vangjel Noti, Ambiente Edil Tirane Complementos < 1000 Centro, Kapanoni 1, Uz 2000, 1029 BANGLADESH A.K.M. -
The Dreaming Mind and the End of the Ming World
The Dreaming Mind and the End of the Ming World The Dreaming Mind and the End of the Ming World • Lynn A. Struve University of Hawai‘i Press Honolulu © 2019 University of Hawai‘i Press This content is licensed under the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International license (CC BY-NC-ND 4.0), which means that it may be freely downloaded and shared in digital format for non-commercial purposes, provided credit is given to the author. Commercial uses and the publication of any derivative works require permission from the publisher. For details, see https://creativecommons.org/licenses/by-nc-nd/4.0/. The Creative Commons license described above does not apply to any material that is separately copyrighted. The open-access version of this book was made possible in part by an award from the James P. Geiss and Margaret Y. Hsu Foundation. Cover art: Woodblock illustration by Chen Hongshou from the 1639 edition of Story of the Western Wing. Student Zhang lies asleep in an inn, reclining against a bed frame. His anxious dream of Oriole in the wilds, being confronted by a military commander, completely fills the balloon to the right. In memory of Professor Liu Wenying (1939–2005), an open-minded, visionary scholar and open-hearted, generous man Contents Acknowledgments • ix Introduction • 1 Chapter 1 Continuities in the Dream Lives of Ming Intellectuals • 15 Chapter 2 Sources of Special Dream Salience in Late Ming • 81 Chapter 3 Crisis Dreaming • 165 Chapter 4 Dream-Coping in the Aftermath • 199 Epilogue: Beyond the Arc • 243 Works Cited • 259 Glossary-Index • 305 vii Acknowledgments I AM MOST GRATEFUL, as ever, to Diana Wenling Liu, head of the East Asian Col- lection at Indiana University, who, over many years, has never failed to cheerfully, courteously, and diligently respond to my innumerable requests for problematic materials, puzzlements over illegible or unfindable characters, frustrations with dig- ital databases, communications with publishers and repositories in China, etcetera ad infinitum.