Communications Handbook for Traffic Control Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Shahabi-Adib-Masc-ECE-August
A New Line Code for a Digital Communication System by Adib Shahabi Submitted in partial fulfilment of the requirements for the degree of Master of Applied Science at Dalhousie University Halifax, Nova Scotia August 2019 © Copyright by Adib Shahabi, 2019 To my wife Shahideh ii TABLE OF CONTENTS LIST OF TABLES ............................................................................................................ v LIST OF FIGURES .......................................................................................................... vi ABSTRACT ....................................................................................................................viii LIST OF ABBREVIATIONS USED ............................................................................... ix ACKNOWLEDGEMENTS ............................................................................................... x CHAPTER 1 INTRODUCTION ....................................................................................... 1 1.1 BACKGROUND ........................................................................................... 1 1.2 THESIS SYNOPSIS ...................................................................................... 4 1.3 ORGANIZATION OF THE THESIS ............................................................ 5 CHAPTER 2 MODELLING THE LINE CHANNEL ....................................................... 7 2.1 CABLE MODELLING .................................................................................. 7 2.2 TRANSFORMER COUPLING .................................................................. -

Criteria for Choosing Line Codes in Data Communication
ISTANBUL UNIVERSITY – YEAR : 2003 (843-857) JOURNAL OF ELECTRICAL & ELECTRONICS ENGINEERING VOLUME : 3 NUMBER : 2 CRITERIA FOR CHOOSING LINE CODES IN DATA COMMUNICATION Demir Öner Istanbul University, Engineering Faculty, Electrical and Electronics Engineering Department Avcılar, 34850, İstanbul, Turkey E-mail: [email protected] ABSTRACT In this paper, line codes used in data communication are investigated. The need for the line codes is emphasized, classification of line codes is presented, coding techniques of widely used line codes are explained with their advantages and disadvantages and criteria for chosing a line code are given. Keywords: Line codes, correlative coding, criteria for chosing line codes.. coding is either performed just before the 1. INTRODUCTION modulation or it is combined with the modulation process. The place of line coding in High-voltage-high-power pulse current The transmission systems is shown in Figure 1. purpose of applying line coding to digital signals before transmission is to reduce the undesirable The line coder at the transmitter and the effects of transmission medium such as noise, corresponding decoder at the receiver must attenuation, distortion and interference and to operate at the transmitted symbol rate. For this ensure reliable transmission by putting the signal reason, epecially for high-speed systems, a into a form that is suitable for the properties of reasonably simple design is usually essential. the transmission medium. For example, a sampled and quantized signal is not in a suitable form for transmission. Such a signal can be put 2. ISSUES TO BE CONSIDERED IN into a more suitable form by coding the LINE CODING quantized samples. -
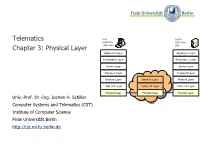
Telematics Chapter 3: Physical Layer
Telematics User Server watching with video Chapter 3: Physical Layer video clip clips Application Layer Application Layer Presentation Layer Presentation Layer Session Layer Session Layer Transport Layer Transport Layer Network Layer Network Layer Network Layer Data Link Layer Data Link Layer Data Link Layer Physical Layer Physical Layer Physical Layer Univ.-Prof. Dr.-Ing. Jochen H. Schiller Computer Systems and Telematics (CST) Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de Contents ● Design Issues ● Theoretical Basis for Data Communication ● Analog Data and Digital Signals ● Data Encoding ● Transmission Media ● Guided Transmission Media ● Wireless Transmission (see Mobile Communications) ● The Last Mile Problem ● Multiplexing ● Integrated Services Digital Network (ISDN) ● Digital Subscriber Line (DSL) ● Mobile Telephone System Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.2 Design Issues Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.3 Design Issues ● Connection parameters ● mechanical OSI Reference Model ● electric and electronic Application Layer ● functional and procedural Presentation Layer ● More detailed ● Physical transmission medium (copper cable, Session Layer optical fiber, radio, ...) ● Pin usage in network connectors Transport Layer ● Representation of raw bits (code, voltage,…) Network Layer ● Data rate ● Control of bit flow: Data Link Layer ● serial or parallel transmission of bits Physical Layer ● synchronous or asynchronous transmission ● simplex, half-duplex, or full-duplex transmission mode Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.4 Design Issues Transmitter Receiver Source Transmission System Destination NIC NIC Input Abcdef djasdja dak jd ashda kshd akjsd asdkjhasjd as kdjh askjda Univ.-Prof. -
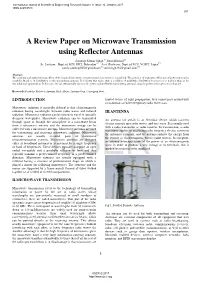
A Review Paper on Microwave Transmission Using Reflector Antennas
International Journal of Scientific & Engineering Research Volume 8, Issue 10, October-2017 ISSN 2229-5518 251 A Review Paper on Microwave Transmission using Reflector Antennas Sandeep Kumar Singh [1],Sumi Kumari[2] Sr. Lecturer, Dept. of ECE, JBIT, Dehradun [1], Asst. Professor, Dept. of ECE, VGIET, Jaipur[2] [email protected][1] [email protected][2] Abstract: The conventional optimization problem of the beamed microwave energy transmission system is considered. The criterion of maximum efficiency of power intercept is parabolic function of distribution on the transmitting antenna. It is shown that under such a condition of amplitude distribution becomes more uniform than as the unconditional optimization. In this case, we can substantially increase the power radiated by the transmitting antenna losing the power intercept no more than 2%. Keywords: Parabolic Reflector Antenna, Radio Relay, Antenna Gain, Cassegrain Feed. I.INTRODUCTION limited to line of sight propagation; they cannot pass around hills or mountains as lower frequency radio waves can. Microwave radiation is generally defined as that electromagnetic radiation having wavelengths between radio waves and infrared III.ANTENNA radiation. Microwave radiation can be forced to travel in specially designed waveguides. Microwave radiation can be transmitted An antenna (or aerial) is an electrical device which converts through space or through the atmosphere in a microwave beam electric currents into radio waves, and vice versa. It is usually used from a microwave antenna and the microwave energy can be with a radio transmitter or radio receiver. In transmission, a radio collected with a microwave antenna. Microwave antennas are used transmitter applies an oscillating radio frequency electric current to for transmitting and receiving microwave radiation. -
CODING for Transmission
CODING for Transmission Professor Izzat Darwazeh Head of Communicaons and Informaon System Group University College London [email protected] Acknowledgement: Dr A. Chorti, Princeton University for slides on FEC coding Dr P.Moreira, CERN, for slides on the CERN Gigabit Transmitter (GBT) Dr J. Mitchell, UCL, for the sampled music and voice. June 2011 Coding • Defini7ons and basic concepts • Source coding • Line coding • Error control coding Digital Line System Message Message source Distortion, sink interference Input Output signal and noise signal Encoder- Demodulator modulator -decoder Communication Transmitted channel Received signal signal Claude Shannon • Shannon’s Theorem predicts reliable communicaon in the presence of noise “Given a discrete, memoryless channel with capacity C, and a source with a posi8ve rate R (R<C), there exist a code such that the output of the source can be transmi@ed over the channel with an arbitrarily small probability of error.” • B is the channel bandwidth in Hz and S/N is the signal power to noise power rao ⎛⎞S CBc =+log2 ⎜⎟ 1 ⎝⎠N Types of Coding • Source Coding – Encoding the raw data • Line (or channel) Coding – Formang of the data stream to benefit transmission • Error Detec7on Coding – Detec7on of errors in the data seQuence • Error Correcon Coding – Detec7on and Correc7on of Errors • Spread Spectrum Coding – Used for wireless communicaons Signals and sources: Discrete - Con8nuous m(t) n Continuous Time and Amplitude n Discrete Time, continuous Amplitude – PAM signal n Discrete Time, and Amplitude -

Estimating the Marginal Effect of Pits and Quarries on Rural Residential Property Values in Wellington County, Ontario: a Hedonic Approach
Estimating the Marginal Effect of Pits and Quarries on Rural Residential Property Values in Wellington County, Ontario: A Hedonic Approach by Alison Grant A Thesis presented to The University of Guelph In partial fulfillment of requirements for the degree of Master of Science in Program Food, Agricultural and Resource Economics Guelph, Ontario, Canada © Alison Grant, June, 2017 ABSTRACT Estimating the Marginal Effect of Pits and Quarries on Rural Residential Property Values in Wellington County, Ontario: A Hedonic Approach Alison Grant Advisor: Dr. Brady Deaton University of Guelph, 2017 Committee: Dr. Jessica Cao Dr. Richard Vyn “Aggregate” material – i.e., sand, gravel, clay, and bedrock – are extracted from pits and quarries throughout Ontario. Aggregates are the number one resource extracted (by value) and used by Ontarians, and approximately $1.2 billion of aggregate material was extracted in Ontario in the last year. While aggregate is a valued resource, the extraction of aggregate is often identified as a negative externality. Similar to other environmental disamenities mentioned in the literature – such as shale gas exploration sites, wind turbines and landfills – residents near aggregate extraction identify a host of events that can be categorized as negative externalities. Residential concerns include noise and visual disamenities, as well as environmental concerns, such as diminished water quality. In this study, I assess the potential impacts of aggregate sites. First, I briefly introduce the perceived impacts of aggregate sites by quoting residents’ concerns through newspaper articles and lobby group websites. I then utilize the hedonic model to test these claims made by residents: namely, the negative effect on property values. -

Windsor-Essex Parkway
Backgrounder The Windsor-Essex Parkway The Windsor-Essex Parkway is part of a long-term transportation solution to improve the movement of goods and people between the Windsor-Detroit border – a vital gateway and key to Ontario’s economic well-being. Project Features The Windsor-Essex Parkway will continue Ontario’s Highway 401 through the municipalities of Tecumseh, LaSalle and Windsor. The Parkway’s design consists of a six- lane below-grade freeway which is an extension of Highway 401, a four-lane service road network which is an extension of Highway 3 and naturalized green space that will distance adjacent residents from the border-bound traffic travelling on the freeway. The Parkway is a once-in-a-generation undertaking. It is unprecedented in its community enhancement features for any highway, anywhere in Ontario and will include: • 11 tunnels covering 1.8 kilometres of freeway • extensive landscaping throughout the corridor • the use of proven techniques to reduce noise levels • special measures to protect wildlife. Vision Upon completion, the 11 kilometre Parkway will ease the movement of goods and people to and from the Windsor-Detroit border, separate local and international traffic, and eliminate stop-and-go traffic in residential areas. With more than 300 acres of green space, 20 kilometres of recreational trails and new community connections, residents in Windsor-Essex will enjoy an improved quality of life. Delivery method The Parkway is the first Ontario road project to be delivered using an alternative financing and procurement (AFP) model – a public-private partnership delivery method. In December 2010, the province signed a fixed-price contract with the Windsor Essex Mobility Group (WEMG) to design, build, finance and to provide long-term maintenance of the Windsor- Essex Parkway. -

Transportation Needs
Chapter 2 – Transportation Needs 407 TRANSITWAY – WEST OF BRANT STREET TO WEST OF HURONTARIO STREET MINISTRY OF TRANSPORTATION - CENTRAL REGION 2.6.4. Sensitivity Analysis 2-20 TABLE OF CONTENTS 2.7. Systems Planning – Summary of Findings 2-21 2. TRANSPORTATION NEEDS 2-1 2.1. Introduction 2-1 2.1.1. Background 2-1 2.1.2. Scope of Systems Planning 2-1 2.1.3. Study Corridor 2-1 2.1.4. Approach 2-2 2.1.5. Overview of the Chapter 2-2 2.2. Existing Conditions and Past Trends 2-2 2.2.1. Current Land Use 2-2 2.2.2. Transportation System 2-3 2.2.3. Historic Travel Trends 2-4 2.2.4. Current Demands and System Performance 2-5 2.3. Future Conditions 2-7 2.3.1. Land Use Changes 2-7 2.3.2. Transportation Network Changes 2-8 2.3.3. Changes in Travel Patterns 2-9 2.3.4. Future Demand and System Performance 2-10 2.4. Service Concept 2-13 2.4.1. Operating Characteristics 2-13 2.4.2. Conceptual Operating and Service Strategy 2-13 2.5. Vehicle Maintenance and Storage support 2-14 2.5.1. Facility Need 2-14 2.5.2. West Yard – Capacity Assessment 2-15 2.5.3. West Yard – Location 2-15 2.6. Transitway Ridership Forecasts 2-15 2.6.1. Strategic Forecasts 2-15 2.6.2. Station Evaluation 2-17 2.6.3. Revised Forecasts 2-18 DRAFT 2-0 . Update ridership forecasts to the 2041 horizon; 2. -

Unit I Microwave Transmission Lines
UNIT I MICROWAVE TRANSMISSION LINES INTRODUCTION Microwaves are electromagnetic waves with wavelengths ranging from 1 mm to 1 m, or frequencies between 300 MHz and 300 GHz. Apparatus and techniques may be described qualitatively as "microwave" when the wavelengths of signals are roughly the same as the dimensions of the equipment, so that lumped-element circuit theory is inaccurate. As a consequence, practical microwave technique tends to move away from the discrete resistors, capacitors, and inductors used with lower frequency radio waves. Instead, distributed circuit elements and transmission-line theory are more useful methods for design, analysis. Open-wire and coaxial transmission lines give way to waveguides, and lumped-element tuned circuits are replaced by cavity resonators or resonant lines. Effects of reflection, polarization, scattering, diffraction, and atmospheric absorption usually associated with visible light are of practical significance in the study of microwave propagation. The same equations of electromagnetic theory apply at all frequencies. While the name may suggest a micrometer wavelength, it is better understood as indicating wavelengths very much smaller than those used in radio broadcasting. The boundaries between far infrared light, terahertz radiation, microwaves, and ultra-high-frequency radio waves are fairly arbitrary and are used variously between different fields of study. The term microwave generally refers to "alternating current signals with frequencies between 300 MHz (3×108 Hz) and 300 GHz (3×1011 Hz)."[1] Both IEC standard 60050 and IEEE standard 100 define "microwave" frequencies starting at 1 GHz (30 cm wavelength). Electromagnetic waves longer (lower frequency) than microwaves are called "radio waves". Electromagnetic radiation with shorter wavelengths may be called "millimeter waves", terahertz radiation or even T-rays. -

Episode 3.11 – Polar and Bipolar Line Coding
Episode 3.11 – Polar and Bipolar Line Coding Welcome to the Geek Author series on Computer Organization and Design Fundamentals. I’m David Tarnoff, and in this series we are working our way through the topics of Computer Organization, Computer Architecture, Digital Design, and Embedded System Design. If you’re interested in the inner workings of a computer, then you’re in the right place. The only background you’ll need for this series is an understanding of integer math, and if possible, a little experience with a programming language such as Java. And one more thing. Our topics involve a bit of figuring, so it might help to keep a pencil and paper handy. In Episode 3.10, we looked at the electrical connection between two digital devices and saw two ways we could use a positive voltage and a zero voltage level to code the logic zeros and logic ones of our data. This unipolar scheme had a disadvantage. The capacitance of a conductor could cause the signal voltage levels to drift toward the positive voltage making it difficult to identify when the transmitted signal was supposed to be zero volts. To solve the drift problem, some physical lines use polar signaling. In this case, the zero volt level is replaced with a voltage that is equal in magnitude and opposite in polarity to the positive voltage. Bipolar signaling is a further extension of polar signaling. Bipolar brings back the zero volt level along with the positive or high level and the negative or low level so that there are three electrical levels. -

ENGINEERING HISTORY PAPER #92 “150 Years of Canadian Engineering: Timelines for Events and Achievements”
THE ENGINEERING INSTITUTE OF CANADA and its member societies L'Institut canadien des ingénieurs et ses sociétés membres EIC’s Historical Notes and Papers Collection (Compilation of historical articles, notes and papers previously published as Articles, Cedargrove Series, Working Papers or Journals) ENGINEERING HISTORY PAPER #92 “150 Years of Canadian Engineering: Timelines for Events and Achievements” by Andrew H. Wilson (previously produced as Cedargrove Series #52/2019 – May 2019) *********************** EIC HISTORY AND ARCHIVES *********************** © EIC 2019 PO Box 40140, Ottawa ON K1V 0W8 +1 (613) 400-1786 / [email protected] / http://www.eic-ici.ca THE CEDARGROVE SERIES OF DISCOURSES, MEMOIRS AND ESSAYS #52/2019 150 YEARS OF CANADIAN ENGINEERING: TIMELINES FOR EVENTS AND ACHIEVEMENTS by Andrew H. Wilson May 2019 Abstract The research for this paper was done as part of a sesquicentennial project on 150 Years of Canadian Engineering. Some of its material has also been presented orally. This paper covers briefly and selectively Canadian engineering events and achievements in four time periods: one up to the time of Confederation in 1867, and three others between then and 2017. Associated with the three later periods are corresponding economic/political/social timelines to help put the engineering in context. There are no comments in it on the quality of the design, construction/manufacture, origins and uses of the items listed. This paper took a whole lot longer than expected to research and write, so that it carries a date in 2019 rather than late in 2017, when the chronological material in it ends. There are no maps or photographs. -

UNIT -1 Microwave Spectrum and Bands-Characteristics Of
UNIT -1 Microwave spectrum and bands-characteristics of microwaves-a typical microwave system. Traditional, industrial and biomedical applications of microwaves. Microwave hazards.S-matrix – significance, formulation and properties.S-matrix representation of a multi port network, S-matrix of a two port network with mismatched load. 1.1 INTRODUCTION Microwaves are electromagnetic waves (EM) with wavelengths ranging from 10cm to 1mm. The corresponding frequency range is 30Ghz (=109 Hz) to 300Ghz (=1011 Hz) . This means microwave frequencies are upto infrared and visible-light regions. The microwaves frequencies span the following three major bands at the highest end of RF spectrum. i) Ultra high frequency (UHF) 0.3 to 3 Ghz ii) Super high frequency (SHF) 3 to 30 Ghz iii) Extra high frequency (EHF) 30 to 300 Ghz Most application of microwave technology make use of frequencies in the 1 to 40 Ghz range. During world war II , microwave engineering became a very essential consideration for the development of high resolution radars capable of detecting and locating enemy planes and ships through a Narrow beam of EM energy. The common characteristics of microwave device are the negative resistance that can be used for microwave oscillation and amplification. Fig 1.1 Electromagnetic spectrum 1.2 MICROWAVE SYSTEM A microwave system normally consists of a transmitter subsystems, including a microwave oscillator, wave guides and a transmitting antenna, and a receiver subsystem that includes a receiving antenna, transmission line or wave guide, a microwave amplifier, and a receiver. Reflex Klystron, gunn diode, Traveling wave tube, and magnetron are used as a microwave sources.