Principles of MICROCOMPUTERS and MICROCONTROLLER ENGINEERING
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Portable Computing Quest
Chapter 1 The Portable Computing Quest In This Chapter ▶ Understanding portable computing ▶ Reviewing laptop history ▶ Recognizing the Tablet PC variation ▶ Getting to know the netbook ▶ Deciding whether you need a laptop figure, sometime a long time ago, one early proto-nerd had an idea. IWearing his thick glasses and a white lab coat, he stared at the large, vacuum tube monster he was tending. He wondered what it would be like to put wheels on the six-ton beast. What if they could wheel it outside and work in the sun? It was a crazy idea, yet it was the spark of a desire. Today that spark has flared into a full-blown portable computing industry. The result is the laptop, Tablet PC, or netbook computer you have in your lap, or which your lap is longing for. It’s been a long road — this chapter tells you about the journey by explaining the history of the portable computing quest. Laptop History You can’t make something portable simply by bolting a handle to it. Sure, it pleasesCOPYRIGHTED the marketing folk who understand MATERIAL that portability is a desirable trait: Put a handle on that 25-pound microwave oven and it’s suddenly “por- table.” You could put a handle on a hippopotamus and call it portable, but the thing already has legs, so what’s the point? My point is that true portability implies that a gizmo has at least these three characteristics: ✓ Lightweight ✓ No power cord ✓ Practical 005_578292-ch01.indd5_578292-ch01.indd 7 112/23/092/23/09 99:11:11 PPMM 8 Part I: The Laptop Shall Set You Free The ancient portable computer Long before people marveled over (solar pow- kids now learn to use the abacus in elementary ered) credit-card-size calculators, there existed school. -
What Are Your Best Computer Options for Teleworking?
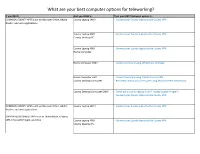
What are your best computer options for teleworking? If you NEED… And you HAVE a… Then your BEST telework option is… COMMON COUNTY APPS such as Microsoft Office, Adobe County Laptop ONLY - Connect your County laptop to the County VPN Reader, and web applications County Laptop AND - Connect your County laptop to the County VPN County Desktop PC County Laptop AND - Connect your County laptop to the County VPN Home Computer Home Computer ONLY - Connect remotely using VDI (Virtual Desktop) Home Computer AND - Connect remotely using Dakota County VPN County Desktop Computer - Remotely control your computer using Windows Remote Desktop County Desktop Computer ONLY - Check out a County laptop from IT Laptop Loaner Program - Connect your County laptop to the County VPN COMMON COUNTY APPS such as Microsoft Office, Adobe County Laptop ONLY - Connect your County laptop to the County VPN Reader, and web applications SUPPORTED BUSINESS APPS such as OneSolution, OnBase, SIRE, Microsoft Project, and Visio County Laptop AND - Connect your County laptop to the County VPN County Desktop PC If you NEED… And you HAVE a… Then your BEST telework option is… County Laptop AND - Connect your County laptop to the County VPN Home Computer Home Computer ONLY - Contact the County IT Help Desk at 651/438-4346 Home Computer AND - Connect remotely using Dakota County VPN County Desktop Computer - Remotely control your computer using Windows Remote Desktop County Desktop Computer ONLY - Check out a County laptop from IT Laptop Loaner Program - Connect your County laptop -

Resource Guide: Workstation Productivity
Resource Guide: Workstation Productivity Contents Beyond the Desktop: Workstation Productivity ……………………………………………………2 Find out how to get the highest productivity possible from high performance applications that require more power than traditional desktop computers Top IT Considerations for Mobile Workstations …………………...............................................4 Discover the top IT considerations for organization that require mobile workstations designed to provide a balance of performance and portability Maximum Management and Control with Virtualized Workstations ....…………………...…….6 Explore the benefits of virtualization to ensure the greatest possible management and control of high performance workstations for the most demanding workloads and applications Sponsored by: Page 1 of 6 Copyright © MMIX, CBS Broadcasting Inc. All Rights Reserved. For more downloads and a free TechRepublic membership, please visit http://techrepublic.com.com/2001-6240-0.html TechRepublic Resource Guide: Workstations Productivity Beyond the Desktop: Workstation Productivity Find out how to get the highest productivity possible from high performance applications that require more power than traditional desktop computers Desktop computers have come a long way in terms of value and performance for the average user but more advanced applications now require even more in terms of processing, graphics, memory and storage. The following is a brief overview of the differences between standard desktops and workstations as well as the implications for overall performance and productivity as compiled from the editorial resources of CNET, TechRepublic and ZDNet.com. Think Inside the Box A lot of people tend to think of desktop computers and computer workstation as one and the same but that isn’t always the case in terms of power and performance. In fact, many of today’s most demanding workloads and applications for industries such as engineering, entertainment, finance, manufacturing, and science actually require much higher functionality than what traditional desktops have to offer. -

Good Reasons to Use a Desktop Computer
Good reasons to use a desktop computer Why would anyone possibly need a desktop? For most, it goes against all common sense to use a desktop because they're not as convenient and portable as a lap- top, and a laptop does what you need it to do just fine. At the same time, the good ol' bulky, stationary desktop still has a place for many people. Here are good reasons why you might want to use desktop computer. You can upgrade the parts, which is cheaper than buying a new laptop. When a laptop starts to slow down, your only option is to buy a whole new one. Depending on what you need a com- puter for, a new laptop could cost thousands of dollars. That's because you have to buy every single part inside the laptop brand new — the processor, motherboard, RAM, hard drive, and everything else. But most of the parts in your old laptop are probably still fine, and it's usually only the processor (and the motherboard it sits on) that needs upgrading. With a desktop you can easily replace an aging processor (and motherboard) for around $300. That said, all-in-one desktops like the iMac can be a little difficult to upgrade. You get more bang for your buck. Depending on the brand, desktops and laptops with similar specs can often cost the same. Yet, the main differences between the two are the processor and the graphics processor. Most Laptops use the smaller mobile version of a processor model, which often aren't quite as powerful as the full-size desktop versions. -

Scaling the Digital Divide: Home Computer Technology and Student Achievement
Scaling the Digital Divide Home Computer Technology and Student Achievement J a c o b V i g d o r a n d H e l e n l a d d w o r k i n g p a p e r 4 8 • j u n e 2 0 1 0 Scaling the Digital Divide: Home Computer Technology and Student Achievement Jacob L. Vigdor [email protected] Duke University Helen F. Ladd Duke University Contents Acknowledgements ii Abstract iii Introduction 1 Basic Evidence on Home Computer Use by North Carolina Public School Students 5 Access to home computers 5 Access to broadband internet service 7 How Home Computer Technology Might Influence Academic Achievement 10 An Adolescent's time allocation problem 10 Adapting the rational model to ten-year-olds 13 Estimation strategy 14 The Impact of Home Computer Technology on Test Scores 16 Comparing across- and within-student estimates 16 Extensions and robustness checks 22 Testing for effect heterogeneity 25 Examining the mechanism: broadband access and homework effort 29 Conclusions 34 References 36 Appendix Table 1 39 i Acknowledgements The authors are grateful to the William T. Grant Foundation and the National Center for Analysis of Longitudinal Data in Education Research (CALDER), supported through Grant R305A060018 to the Urban Institute from the Institute of Education Sciences, U.S. Department of Education for research support. They wish to thank Jon Guryan, Jesse Shapiro, Tim Smeeding, Andrew Leigh, and seminar participants at the University of Michigan, the University of Florida, Cornell University, the University of Missouri‐ Columbia, the University of Toronto, Georgetown University, Harvard University, the University of Chicago, Syracuse University, the Australian National University, the University of South Australia, and Deakin University for helpful comments on earlier drafts. -

The Video Game Industry an Industry Analysis, from a VC Perspective
The Video Game Industry An Industry Analysis, from a VC Perspective Nik Shah T’05 MBA Fellows Project March 11, 2005 Hanover, NH The Video Game Industry An Industry Analysis, from a VC Perspective Authors: Nik Shah • The video game industry is poised for significant growth, but [email protected] many sectors have already matured. Video games are a large and Tuck Class of 2005 growing market. However, within it, there are only selected portions that contain venture capital investment opportunities. Our analysis Charles Haigh [email protected] highlights these sectors, which are interesting for reasons including Tuck Class of 2005 significant technological change, high growth rates, new product development and lack of a clear market leader. • The opportunity lies in non-core products and services. We believe that the core hardware and game software markets are fairly mature and require intensive capital investment and strong technology knowledge for success. The best markets for investment are those that provide valuable new products and services to game developers, publishers and gamers themselves. These are the areas that will build out the industry as it undergoes significant growth. A Quick Snapshot of Our Identified Areas of Interest • Online Games and Platforms. Few online games have historically been venture funded and most are subject to the same “hit or miss” market adoption as console games, but as this segment grows, an opportunity for leading technology publishers and platforms will emerge. New developers will use these technologies to enable the faster and cheaper production of online games. The developers of new online games also present an opportunity as new methods of gameplay and game genres are explored. -

Setup Outlook on Your Home Computer
Setup Outlook on your Home Computer Office 2010: 1. Run Microsoft Outlook 2010 2. When the startup wizard opens click Next. 3. When prompted to configure an E-mail Account select Yes and then click Next. 4. The Auto Account Setup will display next, select E-mail Account and fill in the information. Your password is your network password, the same one you use to log into computers on campus. After you fill the information in click Next. 5. Outlook will begin to setup your account; it may take a few minutes before the next window pops up. 6. You will be prompted with some sort of login screen. The one shown here offers 3 choices (Select the middle one if this is the case), but others may only offer 1. Type in the same username you use to login to campus computers but precede it with sdsmt\ Your password will be the same one you use to login on campus. Click OK to continue. 7. Outlook will finish setting up your account; this may take a few minutes. When it is done press the Finish button. 8. Outlook will start up and will begin to download your emails, contacts, and calendar from the server. This may take several minutes; there will be a green loading bar at the bottom of the window. Office 2007: 1. Run Microsoft Outlook 2007 2. When the startup wizard opens click Next. 3. When prompted to configure an E-mail Account select Yes and then click Next. 4. The Auto Account Setup will display next, select E-mail Account and fill in the information. -

IEEE Spectrum: 25 Microchip
IEEE Spectrum: 25 Microchips That Shook the World http://www.spectrum.ieee.org/print/8747 Sponsored By Select Font Size: A A A 25 Microchips That Shook the World By Brian R. Santo This is part of IEEE Spectrum 's Special Report: 25 Microchips That Shook the World . In microchip design, as in life, small things sometimes add up to big things. Dream up a clever microcircuit, get it sculpted in a sliver of silicon, and your little creation may unleash a technological revolution. It happened with the Intel 8088 microprocessor. And the Mostek MK4096 4-kilobit DRAM. And the Texas Instruments TMS32010 digital signal processor. Among the many great chips that have emerged from fabs during the half-century reign of the integrated circuit, a small group stands out. Their designs proved so cutting-edge, so out of the box, so ahead of their time, that we are left groping for more technology clichés to describe them. Suffice it to say that they gave us the technology that made our brief, otherwise tedious existence in this universe worth living. We’ve compiled here a list of 25 ICs that we think deserve the best spot on the mantelpiece of the house that Jack Kilby and Robert Noyce built. Some have become enduring objects of worship among the chiperati: the Signetics 555 timer, for example. Others, such as the Fairchild 741 operational amplifier, became textbook design examples. Some, like Microchip Technology’s PIC microcontrollers, have sold billions, and are still doing so. A precious few, like Toshiba’s flash memory, created whole new markets. -

Today Computers Are All Around Us. from Desktop Computers To
Today computers are all around us. From desktop computers to smartphones, they're changing the way that we live our lives. But have you ever asked yourself what exactly is a computer? A computer is an electronic device that manipulates information or data. The computer sees data as ones and zeros but it knows how to combine them into more complex things such as a photograph, a movie, a website, a game and much more... Computers use a combination of hardware and software. Hardware is any physical part of the computer which includes all of the internal components and also the external parts like the monitor and keyboard. Software is any set of instructions that tells the hardware what to do such as a web browser, media player or word processor. Now when most people say computer, they're talking about a personal computer. This can be a desktop computer or a laptop computer which has basically the same capabilities but in a more portable package. Personal computers come in two main styles, PC and Mac. PCs are the most common types, there are many different companies that make them and they usually come with the Microsoft Windows operating system. Macs or Macintosh computers are all made by one company, Apple, and they come with the Mac OS 10 operating system. Computers come in many other shapes and sizes, mobile phones, tablets, game consoles and even TVs have built-in computers, although they may not do everything a desktop or laptop can. There is another type of computer that plays an important role in our lives, servers. -

The Cost of Using Computers
Summary: Students calculate and compare electrical costs of computers in various modes. Cost of Computers Grade Level: 5-8 Subject Areas: English Objectives puters, lights, and monitors when they’re not (Media and Technology, Research By the end of this activity, students will be in use reduces the number of comfort com- and Inquiry), Mathematics, able to plaints and air conditioning costs. Science (Physical) • explain that different types of computers use different amounts of electricity; There are many computer myths that have been dispelled over the years. One myth is Setting: Classroom • compare and contrast computer mode settings and their electricity use; and that screen-savers save energy. In fact, it Time: • identify ways to conserve electricity when takes the same amount of electricity to move that fish around your screen as it does to do Preparation: 1 hour using computers. any word processing. Activity: two 50-minute periods Rationale Vocabulary: Another myth is that it takes more energy to Calculating the cost of computers will help turn off and restart your computer than it Blended rate, CPU, Electric rate, students realize potential energy savings both does to just leave it on all the time. It is more Kilowatt-hour, Sleep mode, at school and at home. likely that your computer will be outdated Standby consumption, Watt, Watt before it is worn out by turning it off and on. meter Materials There are some school districts that require • Copies of Calculating Computer Costs Major Concept Areas: computers to be left on at night for software Activity Sheet upgrades and network maintenance; these • Quality of life • Calculator (optional) units are often automatically shut down after • Management of energy the upgrades are complete. -
Classification of Computers
Chapter-2 Classification of Computers Computers can be classified many different ways -- by size, by function, or by processing capacity. Functionality wise 4 types a) Micro computer b) Mini Computer c) Mainframe Computer d) Super Computer Microcomputers Microcomputers are connected to networks of other computers. The price of a microcomputer varies from each other depending on the capacity and features of the computer. Microcomputers make up the vast majority of computers. Single user can interact with this computer at a time. It is a small and general purpose computer. Mini Computer Mini Computer is a small and general purpose computer. It is more expensive than a micro computer. It has more storage capacity and speed. It designed to simultaneously handle the needs of multiple users. Mainframe Computer Large computers are called Mainframes. Mainframe computers process data at very high rates of speed, measured in the millions of instructions per second. They are very expensive than micro computer and mini computer. Mainframes are designed for multiple users and process vast amounts of data quickly. Examples: - Banks, insurance companies, manufacturers, mail-order companies, and airlines are typical users. Super Computers The largest computers are Super Computers. They are the most powerful, the most expensive, and the fastest. They are capable of processing trillions of instructions per second. It uses governmental agencies, such as:- Chemical analysis in laboratory Space exploration National Defense Agency National Weather Service Bio-Medical research Design of many other machines Limitations of Computer Computer cannot take over all activities simply because they are less flexible than humans. It does not hold intelligence of its own. -

Inside the Computer Microcomputer Minicomputer Mainframe
Inside the computer Microcomputer Classification of Systems: • Personal Computer / Workstation. – Microcomputer • Desktop machine, including portables. – Minicomputer • Used for small, individual tasks - such as – Mainframe simple desktop publishing, small business – Supercomputer accounting, etc.... • Typical cost : £500 to £5000. • Chapters 1-5 in Capron • Example : The PCs in the labs are microcomputers. Minicomputer Mainframe • Medium sized server • Large server / Large Business applications • Desk to fridge sized machine. • Large machines in purpose built rooms. • Used for distributed data processing and • Used as large servers and for intensive multi-user server support. business applications. • Typical cost : £5,000 to £500,000. • Typical cost : £500,000 to £10,000,000. • Example : Scarlet is a minicomputer. • Example : IBM ES/9000, IBM 370, IBM 390. Supercomputer • Scientific applications • Large machines. • Typically employ parallel architecture (multiple processors running together). • Used for VERY numerically intensive jobs. • Typical cost : £5,000,000 to £25,000,000. • Example : Cray supercomputer 1 What's in a Computer System? Software • The Onion Model - layers. • Divided into two main areas • Hardware • Operating system • BIOS • Used to control the hardware and to provide an interface between the user and the hardware. • Software • Manages resources in the machine, like • Where does the operating system come in? • Memory • Disk drives • Applications • includes games, word-processors, databases, etc.... Interfaces Hardware • The chunky stuff! •CUI • If you can touch it... it's probably hardware! • Command Line Interface • The mother board. •GUI • If we have motherboards... surely there must be • Graphical User Interface fatherboards? right? •WIMP • What about sonboards, or daughterboards?! • Windows, Icons, Mouse, Pulldown menus • Hard disk drives • Monitors • Keyboards BIOS Basics • Basic Input Output System • Directly controls hardware devices like UARTS (Universal Asynchronous Receiver-Transmitter) - Used in COM ports.