Euler Savary's Formula on Complex Plane
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Differential Geometry
Differential Geometry J.B. Cooper 1995 Inhaltsverzeichnis 1 CURVES AND SURFACES—INFORMAL DISCUSSION 2 1.1 Surfaces ................................ 13 2 CURVES IN THE PLANE 16 3 CURVES IN SPACE 29 4 CONSTRUCTION OF CURVES 35 5 SURFACES IN SPACE 41 6 DIFFERENTIABLEMANIFOLDS 59 6.1 Riemannmanifolds .......................... 69 1 1 CURVES AND SURFACES—INFORMAL DISCUSSION We begin with an informal discussion of curves and surfaces, concentrating on methods of describing them. We shall illustrate these with examples of classical curves and surfaces which, we hope, will give more content to the material of the following chapters. In these, we will bring a more rigorous approach. Curves in R2 are usually specified in one of two ways, the direct or parametric representation and the implicit representation. For example, straight lines have a direct representation as tx + (1 t)y : t R { − ∈ } i.e. as the range of the function φ : t tx + (1 t)y → − (here x and y are distinct points on the line) and an implicit representation: (ξ ,ξ ): aξ + bξ + c =0 { 1 2 1 2 } (where a2 + b2 = 0) as the zero set of the function f(ξ ,ξ )= aξ + bξ c. 1 2 1 2 − Similarly, the unit circle has a direct representation (cos t, sin t): t [0, 2π[ { ∈ } as the range of the function t (cos t, sin t) and an implicit representation x : 2 2 → 2 2 { ξ1 + ξ2 =1 as the set of zeros of the function f(x)= ξ1 + ξ2 1. We see from} these examples that the direct representation− displays the curve as the image of a suitable function from R (or a subset thereof, usually an in- terval) into two dimensional space, R2. -

An Approach on Simulation of Involute Tooth Profile Used on Cylindrical Gears
BULETINUL INSTITUTULUI POLITEHNIC DIN IAŞI Publicat de Universitatea Tehnică „Gheorghe Asachi” din Iaşi Volumul 66 (70), Numărul 2, 2020 Secţia CONSTRUCŢII DE MAŞINI AN APPROACH ON SIMULATION OF INVOLUTE TOOTH PROFILE USED ON CYLINDRICAL GEARS BY MIHĂIȚĂ HORODINCĂ “Gheorghe Asachi” Technical University of Iaşi, Faculty of Machine Manufacturing and Industrial Management Received: April 6, 2020 Accepted for publication: June 10, 2020 Abstract. Some results on theoretical approach related by simulation of 2D involute tooth profiles on spur gears, based on rolling of a mobile generating rack around a fixed pitch circle are presented in this paper. A first main approach proves that the geometrical depiction of each generating rack position during rolling can be determined by means of a mathematical model which allows the calculus of Cartesian coordinates for some significant points placed on the rack. The 2D involute tooth profile appears to be the internal envelope bordered by plenty of different equidistant positions of the generating rack during a complete rolling. A second main approach allows the detection of Cartesian coordinates of this internal envelope as the best approximation of 2D involute tooth profile. This paper intends to provide a way for a better understanding of involute tooth profile generation procedure. Keywords: tooth profile; involute; generating rack; simulation. 1. Introduction Gear manufacturing is a major topic in industry due to a large scale utilization of gears for motion transmissions and speed reducers. Commonly the flank gear surface on cylindrical toothed wheels (gears) is described by two Corresponding author: e-mail: [email protected] 22 Mihăiţă Horodincă orthogonally curves: an involute as flank line (in a transverse plane) and a profile line. -
On the Topology of Hypocycloid Curves
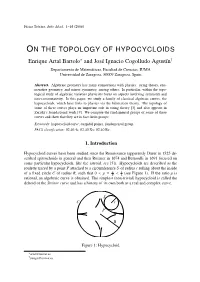
Física Teórica, Julio Abad, 1–16 (2008) ON THE TOPOLOGY OF HYPOCYCLOIDS Enrique Artal Bartolo∗ and José Ignacio Cogolludo Agustíny Departamento de Matemáticas, Facultad de Ciencias, IUMA Universidad de Zaragoza, 50009 Zaragoza, Spain Abstract. Algebraic geometry has many connections with physics: string theory, enu- merative geometry, and mirror symmetry, among others. In particular, within the topo- logical study of algebraic varieties physicists focus on aspects involving symmetry and non-commutativity. In this paper, we study a family of classical algebraic curves, the hypocycloids, which have links to physics via the bifurcation theory. The topology of some of these curves plays an important role in string theory [3] and also appears in Zariski’s foundational work [9]. We compute the fundamental groups of some of these curves and show that they are in fact Artin groups. Keywords: hypocycloid curve, cuspidal points, fundamental group. PACS classification: 02.40.-k; 02.40.Xx; 02.40.Re . 1. Introduction Hypocycloid curves have been studied since the Renaissance (apparently Dürer in 1525 de- scribed epitrochoids in general and then Roemer in 1674 and Bernoulli in 1691 focused on some particular hypocycloids, like the astroid, see [5]). Hypocycloids are described as the roulette traced by a point P attached to a circumference S of radius r rolling about the inside r 1 of a fixed circle C of radius R, such that 0 < ρ = R < 2 (see Figure 1). If the ratio ρ is rational, an algebraic curve is obtained. The simplest (non-trivial) hypocycloid is called the deltoid or the Steiner curve and has a history of its own both as a real and complex curve. -

Around and Around ______
Andrew Glassner’s Notebook http://www.glassner.com Around and around ________________________________ Andrew verybody loves making pictures with a Spirograph. The result is a pretty, swirly design, like the pictures Glassner EThis wonderful toy was introduced in 1966 by Kenner in Figure 1. Products and is now manufactured and sold by Hasbro. I got to thinking about this toy recently, and wondered The basic idea is simplicity itself. The box contains what might happen if we used other shapes for the a collection of plastic gears of different sizes. Every pieces, rather than circles. I wrote a program that pro- gear has several holes drilled into it, each big enough duces Spirograph-like patterns using shapes built out of to accommodate a pen tip. The box also contains some Bezier curves. I’ll describe that later on, but let’s start by rings that have gear teeth on both their inner and looking at traditional Spirograph patterns. outer edges. To make a picture, you select a gear and set it snugly against one of the rings (either inside or Roulettes outside) so that the teeth are engaged. Put a pen into Spirograph produces planar curves that are known as one of the holes, and start going around and around. roulettes. A roulette is defined by Lawrence this way: “If a curve C1 rolls, without slipping, along another fixed curve C2, any fixed point P attached to C1 describes a roulette” (see the “Further Reading” sidebar for this and other references). The word trochoid is a synonym for roulette. From here on, I’ll refer to C1 as the wheel and C2 as 1 Several the frame, even when the shapes Spirograph- aren’t circular. -

Some Curves and the Lengths of Their Arcs Amelia Carolina Sparavigna
Some Curves and the Lengths of their Arcs Amelia Carolina Sparavigna To cite this version: Amelia Carolina Sparavigna. Some Curves and the Lengths of their Arcs. 2021. hal-03236909 HAL Id: hal-03236909 https://hal.archives-ouvertes.fr/hal-03236909 Preprint submitted on 26 May 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Some Curves and the Lengths of their Arcs Amelia Carolina Sparavigna Department of Applied Science and Technology Politecnico di Torino Here we consider some problems from the Finkel's solution book, concerning the length of curves. The curves are Cissoid of Diocles, Conchoid of Nicomedes, Lemniscate of Bernoulli, Versiera of Agnesi, Limaçon, Quadratrix, Spiral of Archimedes, Reciprocal or Hyperbolic spiral, the Lituus, Logarithmic spiral, Curve of Pursuit, a curve on the cone and the Loxodrome. The Versiera will be discussed in detail and the link of its name to the Versine function. Torino, 2 May 2021, DOI: 10.5281/zenodo.4732881 Here we consider some of the problems propose in the Finkel's solution book, having the full title: A mathematical solution book containing systematic solutions of many of the most difficult problems, Taken from the Leading Authors on Arithmetic and Algebra, Many Problems and Solutions from Geometry, Trigonometry and Calculus, Many Problems and Solutions from the Leading Mathematical Journals of the United States, and Many Original Problems and Solutions. -

On the Topology of Hypocycloids
ON THE TOPOLOGY OF HYPOCYCLOIDS ENRIQUE ARTAL BARTOLO AND JOSE´ IGNACIO COGOLLUDO-AGUST´IN Abstract. Algebraic geometry has many connections with physics: string theory, enumerative geometry, and mirror symmetry, among others. In par- ticular, within the topological study of algebraic varieties physicists focus on aspects involving symmetry and non-commutativity. In this paper, we study a family of classical algebraic curves, the hypocycloids, which have links to physics via the bifurcation theory. The topology of some of these curves plays an important role in string theory [3] and also appears in Zariski’s foundational work [9]. We compute the fundamental groups of some of these curves and show that they are in fact Artin groups. 1. Introduction Hypocycloid curves have been studied since the Renaissance (apparently D¨urer in 1525 described epitrochoids in general and then Roemer in 1674 and Bernoulli in 1691 focused on some particular hypocycloids, like the astroid, see [5]). Hypocy- cloids are described as the roulette traced by a point P attached to a circumference S of radius r rolling about the inside of a fixed circle C of radius R, such that r 1 0 < ρ = R < 2 (see Figure 1). If the ratio ρ is rational, an algebraic curve is ob- tained. The simplest (non-trivial) hypocycloid is called the deltoid or the Steiner curve and has a history of its own both as a real and complex curve. S r C P arXiv:1703.08308v1 [math.AG] 24 Mar 2017 R Figure 1. Hypocycloid Key words and phrases. hypocycloid curve, cuspidal points, fundamental group. -

Generating Negative Pedal Curve Through Inverse Function – an Overview *Ramesha
© 2017 JETIR March 2017, Volume 4, Issue 3 www.jetir.org (ISSN-2349-5162) Generating Negative pedal curve through Inverse function – An Overview *Ramesha. H.G. Asst Professor of Mathematics. Govt First Grade College, Tiptur. Abstract This paper attempts to study the negative pedal of a curve with fixed point O is therefore the envelope of the lines perpendicular at the point M to the lines. In inversive geometry, an inverse curve of a given curve C is the result of applying an inverse operation to C. Specifically, with respect to a fixed circle with center O and radius k the inverse of a point Q is the point P for which P lies on the ray OQ and OP·OQ = k2. The inverse of the curve C is then the locus of P as Q runs over C. The point O in this construction is called the center of inversion, the circle the circle of inversion, and k the radius of inversion. An inversion applied twice is the identity transformation, so the inverse of an inverse curve with respect to the same circle is the original curve. Points on the circle of inversion are fixed by the inversion, so its inverse is itself. is a function that "reverses" another function: if the function f applied to an input x gives a result of y, then applying its inverse function g to y gives the result x, and vice versa, i.e., f(x) = y if and only if g(y) = x. The inverse function of f is also denoted. -

Cissoid ∗ History Diocles ( 250 – ∼100 BC) Invented This Curve to Solve the Dou- Bling of the Cube Problem (Also Know As the the Delian Prob- Lem)
Cissoid ∗ History Diocles ( 250 – ∼100 BC) invented this curve to solve the dou- bling of the cube problem (also know as the the Delian prob- lem). The name cissoid (ivy-shaped) derives from the shape of the curve. Later the method used to generate this curve was generalized, and we call all curves generated in a similar way cissoids. Newton (see below) found a way to generate the cis- soid mechanically. The same kinematic motion with a different choice of drawing pin generates the (right) strophoid. From Thomas L. Heath’s Euclid’s Elements translation (1925) (comments on definition 2, book one): This curve is assumed to be the same as that by means of which, according to Eutocius, Diocles in his book On burning-glasses solved the problem of doubling the cube. From Robert C. Yates’ Curves and their properties (1952): As early as 1689, J. C. Sturm, in his Mathesis Enucleata, gave a mechanical device for the constructions of the cissoid of Diocles. From E.H.Lockwood A book of Curves (1961): The name cissoid (“Ivy-shaped”) is mentioned by Gemi- nus in the first century B.C., that is, about a century ∗This file is from the 3D-XploreMath project. Please see http://rsp.math.brandeis.edu/3D-XplorMath/index.html 1 after the death of the inventor Diocles. In the commen- taries on the work by Archimedes On the Sphere and the Cylinder, the curve is referred to as Diocles’ contribution to the classic problem of doubling the cube. ... Fermat and Roberval constructed the tangent (1634); Huygens and Wallis found the area (1658); while Newton gives it as an example, in his Arithmetica Universalis, of the an- cients’ attempts at solving cubic problems and again as a specimen in his Enumeratio Linearum Tertii Ordinis. -

The Math in “Laser Light Math”
The Math in “Laser Light Math” When graphed, many mathematical curves are beautiful to view. These curves are usually brought into graphic form by incorporating such devices as a plotter, printer, video screen, or mechanical spirograph tool. While these techniques work, and can produce interesting images, the images are normally small and not animated. To create large-scale animated images, such as those encountered in the entertainment industry, light shows, or art installations, one must call upon some unusual graphing strategies. It was this desire to create large and animated images of certain mathematical curves that led to our design and implementation of the Laser Light Math projection system. In our interdisciplinary efforts to create a new way to graph certain mathematical curves with laser light, Professor Lessley designed the hardware and software and Professor Beale constructed a simplified set of harmonic equations. Of special interest was the issue of graphing a family of mathematical curves in the roulette or spirograph domain with laser light. Consistent with the techniques of making roulette patterns, images created by the Laser Light Math system are constructed by mixing sine and cosine functions together at various frequencies, shapes, and amplitudes. Images created in this fashion find birth in the mathematical process of making “roulette” or “spirograph” curves. From your childhood, you might recall working with a spirograph toy to which you placed one geared wheel within the circumference of another larger geared wheel. After inserting your pen, then rotating the smaller gear around or within the circumference of the larger gear, a graphed representation emerged of a certain mathematical curve in the roulette family (such as the epitrochoid, hypotrochoid, epicycloid, hypocycloid, or perhaps the beautiful rose family). -

And Innovative Research of Emerging Technologies
WWW.JETIR.ORG [email protected] An International Open Access Journal UGC and ISSN Approved | ISSN: 2349-5162 INTERNATIONAL JOURNAL OF EMERGING TECHNOLOGIES AND INNOVATIVE RESEARCH JETIR.ORG INTERNATIONAL JOURNAL OF EMERGING TECHNOLOGIES AND INNOVATIVE RESEARCH International Peer Reviewed, Open Access Journal ISSN: 2349-5162 | Impact Factor: 5.87 UGC and ISSN Approved Journals. Website: www. jetir.org Website: www.jetir.org JETIR INTERNATIONAL JOURNAL OF EMERGING TECHNOLOGIES AND INNOVATIVE RESEARCH (ISSN: 2349-5162) International Peer Reviewed, Open Access Journal ISSN: 2349-5162 | Impact Factor: 5.87 | UGC and ISSN Approved ISSN (Online): 2349-5162 This work is subjected to be copyright. All rights are reserved whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, re-use of illusions, recitation, broadcasting, reproduction on microfilms or in any other way, and storage in data banks. Duplication of this publication of parts thereof is permitted only under the provision of the copyright law, in its current version, and permission of use must always be obtained from JETIR www.jetir.org Publishers. International Journal of Emerging Technologies and Innovative Research is published under the name of JETIR publication and URL: www.jetir.org. © JETIR Journal Published in India Typesetting: Camera-ready by author, data conversation by JETIR Publishing Services – JETIR Journal. JETIR Journal, WWW. JETIR.ORG ISSN (Online): 2349-5162 International Journal of Emerging Technologies and Innovative Research (JETIR) is published in online form over Internet. This journal is published at the Website http://www.jetir.org maintained by JETIR Gujarat, India. © 2017 JETIR March 2017, Volume 4, Issue 3 www.jetir.org (ISSN-2349-5162) Generating Negative pedal curve through Inverse function – An Overview *Ramesha. -
Critical Values for Higher Rank Numerical Ranges Associated with Roulette Curves ∗ Mao-Ting Chien A, ,1, Hiroshi Nakazato B,2
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Linear Algebra and its Applications 437 (2012) 2117–2127 Contents lists available at SciVerse ScienceDirect Linear Algebra and its Applications journal homepage: www.elsevier.com/locate/laa Critical values for higher rank numerical ranges associated with roulette curves ∗ Mao-Ting Chien a, ,1, Hiroshi Nakazato b,2 a Department of Mathematics, Soochow University, Taipei 11102, Taiwan b Department of Mathematical Sciences, Faculty of Science and Technology, Hirosaki University, Hirosaki 036-8561, Japan ARTICLE INFO ABSTRACT Article history: In this paper the critical value is determined for the higher rank nu- Received 1 June 2011 merical ranges of matrices associated with a parameter of roulette Accepted 2 May 2012 curves, for which the higher rank numerical range is a regular poly- Available online 2 July 2012 gon for every parameter less than or equal to the critical value. SubmittedbyR.A.Brualdi © 2012 Elsevier Inc. All rights reserved. AMS classification: 15A60 14Q05 Keywords: Rank-k-numerical range Critical value Singular point Roulette curve 1. Introduction Let Mn be the algebra of n × n complex matrices. For a positive integer k n, the rank-k-numerical range of A ∈ Mn is defined as k(A) ={λ ∈ C : PAP = λP for some rank k orthogonal projection P}. The rank-k-numerical range is introduced by Choi et al. [5] in connection with the study of quantum error corrections. If k = 1, k(A) = W(A) is known as the numerical range of A which is also defined as ∗ ∗ W(A) ={ξ Aξ : ξ ∈ Cn,ξ ξ = 1}. -

1970-2020 TOPIC INDEX for the College Mathematics Journal (Including the Two Year College Mathematics Journal)
1970-2020 TOPIC INDEX for The College Mathematics Journal (including the Two Year College Mathematics Journal) prepared by Donald E. Hooley Emeriti Professor of Mathematics Bluffton University, Bluffton, Ohio Each item in this index is listed under the topics for which it might be used in the classroom or for enrichment after the topic has been presented. Within each topic entries are listed in chronological order of publication. Each entry is given in the form: Title, author, volume:issue, year, page range, [C or F], [other topic cross-listings] where C indicates a classroom capsule or short note and F indicates a Fallacies, Flaws and Flimflam note. If there is nothing in this position the entry refers to an article unless it is a book review. The topic headings in this index are numbered and grouped as follows: 0 Precalculus Mathematics (also see 9) 0.1 Arithmetic (also see 9.3) 0.2 Algebra 0.3 Synthetic geometry 0.4 Analytic geometry 0.5 Conic sections 0.6 Trigonometry (also see 5.3) 0.7 Elementary theory of equations 0.8 Business mathematics 0.9 Techniques of proof (including mathematical induction 0.10 Software for precalculus mathematics 1 Mathematics Education 1.1 Teaching techniques and research reports 1.2 Courses and programs 2 History of Mathematics 2.1 History of mathematics before 1400 2.2 History of mathematics after 1400 2.3 Interviews 3 Discrete Mathematics 3.1 Graph theory 3.2 Combinatorics 3.3 Other topics in discrete mathematics (also see 6.3) 3.4 Software for discrete mathematics 4 Linear Algebra 4.1 Matrices, systems