Increase of Capacity on the Shinkansen High-Speed Line Using Virtual Coupling
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Outdoor Club Japan (OCJ) 国際 アウトドア・クラブ・ジャパン Events
Outdoor Club Japan (OCJ) 国際 アウトドア・クラブ・ジャパン Events Norikuradake Super Downhill 10 March Friday to 12 March Monday If you are not satisfied ski & snowboard in ski area. You can skiing from summit. Norikuradake(3026m)is one of hundred best mountain in Japan. This time is good condition of backcountry ski season. Go up to the summit of Norikuradake by walk from the top of last lift(2000m). Climb about 5 hours and down to bottom lift(1500m) about 50 min. (Deta of last time) Transport: Train from Shinjuku to Matsumoto and Taxi from Matsumoto to Norikura-kogen. Return : Bus from Norikura-kogen to Sinshimashima and train to Shinjuku. Meeting Time & Place : 19:30 Shijuku st. platform 5 car no.1 for super Azusa15 Cost : About Yen30000 Train Shinjuku to matsumoto Yen6200(ow) but should buy 4coupon ticket each coupon Yen4190 or You can buy discount ticket shop in town price is similar. (price is non-reserve seat) Taxi about Yen13000 we will share. Return bus Yen1300 and local train Yen680. Inn Yen14000+tax 2 overnight 2 breakfast 1 dinner (no dinner Friday) Japanese room and hot spring! Necessary equipment : Skiers & Telemarkers need a nylon mohair skin. Snowboarders need snowshoes. Crampons(over 8point!) Clothes: Gore-tex jacket and pants, fleece, hut, musk, gloves, sunglasses, headlamp, thermos, lunch, sunscreen If you do not go up to the summit, you can enjoy the ski area and hot springs. 1 day lift pass Yen4000 Limit : 12persons (priority is downhill from summit) In Japanese : 026m)の頂上からの滑降です。 ゲレンデスキーに物足りないスキーヤー、スノーボーダー向き。 山スキーにいいシーズンですが、天気次第なので一応土、日と2日間の時間をとりました。 -

Yamanaka Onsen Niigata Fukushima
Tourist map of Yamanaka Onsen Niigata Fukushima and Hokuriku area Nagaoka Joetsumyoko Sta. Itoigawa Echigoyuzawa Sta. Shintakaoka Sta. Iiyama Kurobe Kanazawa Unazukionsen Sta. Nagano Toyama Tateyama/Kurobe Kaga Onsen Sta. Komatsu Annakaharuna Sta. Utsunomiya Kenrokuen Garden Ueda Tojinbo Takasaki Awaraonsen Sta. Shirakawago Sakudaira Sta. Karuizawa Fukui Yamanaka Onsen Omiya The aroma of the Onsen has been healing travelers Nanjo Eiheiji Temple Tokyo since its inauguration 1300 years ago. Tsuruga Maibara Tottori Nagoya Kyoto Shizuoka Kobe Okayama Shinosaka Sta. Access to Yamanaka Onsen Train To JR Line Kaga Onsen Station ◎ Tokyo – Hokuriku Shinkansen (Kagayaki or Hakutaka) – Kanazawa – Hokuriku line express (Shirasagi or underbird) – Kaga Onsen station Approx 2 hours 55 minutes ◎ Tokyo – Tokaido Shinkansen (Hikari) – Maibara – Hokuriku line express (Shirasagi) – Kaga Onsen station Approx 3 hours 50 minutes ◎ Kyoto – Hokuriku line express (underbird) – Kaga Onsen station Approx 1 hour 45 minutes ◎ Osaka – Hokuriku line express (underbird) – Kaga Onsen station Approx 2 hours 20 minutes ◎ Nagoya – Tokaido Shinkansen (Hikari) – Maibara – Hokuriku line express (Shirasagi) – Kaga Onsen station Approx 2 hours 10 minutes ◎ Kanazawa – Hokuriku line express (Shirasagi or underbird) – Kaga Onsen station Approx 25 minutes * Time calculated for the fastest trains available. * Transportation services available from Kaga Onsen Station. * 20 minutes from Kaga Onsen Station by taxi. Hokuriku Shinkansen running between Kanazawa and Tokyo was put into service on March 14th 2015. Hokuriku Shinkansen made it 1 hour and 20 minutes faster to travel from Tokyo to Kanazawa. Airplane To Komatsu airport ◎ From Haneda Approx 1 hour ◎ From Narita Approx 1 hour 20 minutes ◎ From Sapporo Approx 1 hour 45 minutes ◎ From Sendai Approx 1 hour 10 minutes ◎ From Fukuoka Approx 1 hour 30 minutes * Approx 30 minutes by Can Bus from Komatsu airport to Kaga Onsen. -

About Suspension of Some Trains
About suspension of some trains Some trains will be suspended considering the transport of passengers due to the outbreak of the Novel Coronavirus. *Please note that further suspension may be subject to occur. 【Suspended Kyushu Shinkansen】 (May 11 – 31) ○Kumamoto for Kagoshima-Chūō ※Service between Kumamoto and Shin-Osaka is available. Name of train Kumamoto Kagoshima-Chūō Day of suspension SAKURA 545 10:34 11:20 May 11~31 SAKURA 555 15:23 16:10 May 11~31 SAKURA 409 12:18 13:15 May 11~31 ○Kagoshima-Chūō for Kumamoto ※Service between Kumamoto and Shin-Osaka is available. Name of train Kagoshima-Chūō Kumamoto Day of suspension SAKURA 554 11:34 12:20 May 11~31 SAKURA 562 14:35 15:20 May 11~31 SAKURA 568 17:18 18:03 May 11~31 MIZUHO 612 18:04 18:48 May 11~31 【Suspended Hokuriku Shinkansen】 (May 1 – 31) ○Tōkyō for Kanazawa Name of train Tōkyō Kanazawa Day of suspension KAGAYAKI 521 8:12 10:47 May 1~31 KAGAYAKI 523 10:08 12:43 May 2. 9. 16. 23. 30 KAGAYAKI 525 10:48 13:23 May 1~4. 9. 16. 23. 30 KAGAYAKI 527 11:48 14:25 May 2. 3. 5. 6 KAGAYAKI 529 12:48 15:26 May 2~6 KAGAYAKI 531 13:52 16:26 May 1. 3~6. 8. 15. 22. 29. 31 KAGAYAKI 533 14:52 17:26 May 1. 8~10. 15~17. 22~24. 29~31 KAGAYAKI 535 17:04 19:41 May 2~6 KAGAYAKI 539 19:56 22:30 May 1~6. -

Uredas, URGENT EARTHQUAKE DETECTION and ALARM SYSTEM, NOW and FUTURE
13th World Conference on Earthquake Engineering Vancouver, B.C., Canada August 1-6, 2004 Paper No. 908 UrEDAS, URGENT EARTHQUAKE DETECTION AND ALARM SYSTEM, NOW AND FUTURE Yutaka NAKAMURA 1 SUMMARY UrEDAS, Urgent Earthquake Detection and Alarm System, can realize the real-time early earthquake detection and alarm system in the world. There is a local government that has realized a tsunami warning system using real-time estimated earthquake parameters as magnitude and location, distributed by UrEDAS. On 26th May 2003, the Miyagiken-Oki Earthquake was occurred. It was so large that the maximum acceleration of about 600 Gal was observed along the Shinkansen line and 23 columns of the rigid frame viaducts (RC) were severely cracked. This earthquake occurred on the business hours of the Shinkansen. As expected, coastline “Compact UrEDAS” along the Shinkansen took out the early P-wave alarm before the destructive earthquake motion and the validity of this system was proved for the first time. INTRODUCTION UrEDAS is the only real time P-wave alarm system over the world on practical use. It is characterized to be able to process digitized waveform step by step without saving. Amount of procedure does not differs either earthquake occurs or not, so failure because of over load will not occur. The 2003 Miyagiken-Oki earthquake (Mj 7.1) occurred on 26th May, Compact UrEDAS worked as expected. It was for the first time that the validity of the early warning system was verified under circumstances of big earthquake such as rigid frame viaducts of Shinkansen were damaged. In this paper, the present condition of P-wave early detection system UrEDAS will be viewed referring to cases at work, also result of test observation where faults exists will be reported. -
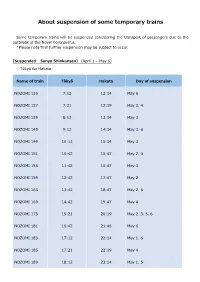
About Suspension of Some Temporary Trains(Translation:PDF76KB)
About suspension of some temporary trains Some temporary trains will be suspended considering the transport of passengers due to the outbreak of the Novel Coronavirus. *Please note that further suspension may be subject to occur. 【Suspended Sanyo Shinkansen】 (April 1 – May 6) ○Tōkyō for Hakata Name of train Tōkyō Hakata Day of suspension NOZOMI 135 7:12 12:14 May 6 NOZOMI 137 7:21 12:19 May 3. 4 NOZOMI 139 8:12 13:14 May 3 NOZOMI 145 9:12 14:14 May 3. 6 NOZOMI 149 10:12 15:14 May 3 NOZOMI 151 10:42 15:47 May 2. 4 NOZOMI 155 11:42 16:47 May 3 NOZOMI 159 12:42 17:47 May 2 NOZOMI 163 13:42 18:47 May 2. 6 NOZOMI 169 14:42 19:47 May 4 NOZOMI 173 15:21 20:19 May 2. 3. 5. 6 NOZOMI 181 16:42 21:46 May 6 NOZOMI 183 17:12 22:14 May 1. 6 NOZOMI 185 17:21 22:19 May 4 NOZOMI 189 18:12 23:14 May 1. 5 ○Hakata for Tōkyō Name of train Hakata Tōkyō Day of suspension NOZOMI 136 7:58 13:03 May 3 NOZOMI 138 8:31 13:33 May 1 NOZOMI 140 8:58 14:03 May 2. 3. 5. 6 NOZOMI 144 9:58 15:03 May 2. 3. 5. 6 NOZOMI 150 11:31 16:33 May 2. 5 NOZOMI 152 11:58 17:03 May 4 NOZOMI 156 12:58 18:03 May 3 NOZOMI 160 13:31 18:33 May 4 NOZOMI 170 15:31 20:33 May 2. -

Toyota Kaikan Route from Nagoya Station to Toyota Kaikan
Subway Higashiyama Line Total travel time Route from Nagoya Station to Toyota Kaikan. 80 min. Travel Your travel plan Departure/Arrival time Fare Details Remarks Nagoya Station D 9:00 STEP 名古屋 It is one station from Nagoya Station to Fushimi 3 min. Fushimi Subway Station Station. A 1 Higashiyama Subway Line 伏見 9:03 760 yen Fushimi Subway Station D 9:13 STEP 伏見 It is twenty-one stations from Fushimi Station to 46 min. Local Toyotashi Station. Tsurumai Subway Line to Meitetsu Toyotashi Station Meitetsu Toyota Line 名鉄 豊田市 A 9:59 2 (shared track at the Akaike Station) Hoei Taxi Meitetsu Taxi Meitetsu Toyotashi Station D 10:00 approx. 0565-28-0228 0565-32-1541 1 15 min. 2000 yen Toyota Kaikan Museum Please Note: If taxi is not at station, (North Exit) Taxi A 10:15 ( you may have to wait up 20-30 minutes. ) STEP Meitetsu Toyotashi Station D 10:05 3 It is twelve stops from Toyotashi Station to 2 19 min. 300 yen Toyota Honsha-Mae Bus Stop. Meitetsu Bus Toyota Honsha-Mae A 10:24 * Please note tavel time may be longer depending on the traffic. * Based on the latest information as of March 7, 2018. Meitetsu Toyota-shi Station map Toyota Kaikan vicinity map Towards Toyota City Taxi Station Head Office East exit Technical Center Clock Tower Toyota-cho Toyota Kaikan Grounds Main Building Meitetsu World Bus Stop Kaikan Museum Toyota Travel 248 Highway National (Oiden Bus) Ticket Gate Lotteria M2F West exit Convenience store 1F McDonald's Office Building Towards P National Highway 155 Toyota Interchange Toyota-cho Toyota Honsha-Mae Bus Stop (Meitetsu Bus) South West Bus Matsuzakaya Towards Toyota Higashi Station Interchange & Okazaki 2F 4 Toyota Kaikan Museum station 1 Toyota-cho, Toyota City, Aichi Prefecture 471-0826, Japan Meitestsu Bus Museum Hours: 9:30 a.m. -

OFFICIAL GAZETTE GOVERNMENTPRINTING AGENGY Y^Jjjysh" Edl77on J IS-+-^+-Fl £+ B £M[Ffittsv
OFFICIAL GAZETTE GOVERNMENTPRINTING AGENGY y^jjjySH" EDl77ON j IS-+-^+-fl £+ B £M[ffittSV No. 1676 WEDNESDAY, OCTOBER 24, 1951 Price 45.00 yen (3) The amount of each Railway Bond Certi- CABINET ORDERS ficate; I hereby promulgate the Cabinet Order for Par- (4) The rate of interest; (5) The issue price; tial Amendments to the Enforcement Order of (6) The mode and time of redemption; the Japanese National Railways Law. (7) The manner and time of the payment of Signed: HIROHITO, Seal of the Emperor interest ; This twenty-fourth day of the tenth month of (8) That each Railway Bond shall be unin- the twenty-sixth year of Showa (October 24, 1951) scribed ; Prime Minister (9) The disposition of the matter of over- YOSHIDA Shigeru subscription ; Cabinet Order No. 339 (10) The name or names of the agency com- Cabinet Order for Partial Amendments to pany or companies commissioned with the busi- the Enforcement Order of the Japanese ness of public offering, if any; ; National Railways Law (ll) The name of the registration organ as For the purpose of enforcing the Japanese Na- prescribed by the Corporation Debentures Reg- tional Railways Law (Law No. 256 of 1948) and istration Law (Law No. ll of 1942). in accordance with the said Law, the Cabinet es- (Acceptance of Railway Bonds) tablishes this Cabinet Order. Article 22. In the case where the Government The Enforcement Order of the Japanese Nation- accepts Railway Bonds or where the company al Railways Law (Cabinet Order No. 113 of 1948) or companies commissioned with the business of shall be partially amended as follows: public offering of Railway Bonds, accept Rail- Article 19 shall be made Article 29, and the way Bonds by themselves, the provisions of the numbering of the succeeding Articles shall be mov- preceding Article shall not apply to the portion down by ten; and next to Article 18 shall be of the bonds accepted. -

Toyota Kaikan Route from Nagoya Station to Toyota Kaikan
Meitetsu Nagoya Line Total travel time Route from Nagoya Station to Toyota Kaikan. 70 min. Your travel plan Departure/Arrival Travel Fare Details Remarks time Nagoya Station D 9:00 STEP This is in the best situation. 4 min. Please Plan to take 10-15minutes to be Safe. Meitetsu Nagoya Station 1 Walking A 9:04 Meitetsu Nagoya Station 名鉄 名古屋 D 9:05 It is three stations from Nagoya Station to Limited STEP 20 min. Chiryu Station. express Chiryu Station Note: Some cars require an additional fee. 2 Meitetsu Nagoya Line 知立 A 9:25 660 yen Chiryu Station 知立 D 9:35 STEP It is five stations from Chiryu Station to 17 min. Local Tsuchihashi Station. Tsuchihashi Station A 9:52 3 Meitetsu Mikawa Line 土橋 Hoei Taxi Meitetsu Taxi Tsuchihashi Station D 9:55 approx. 0565-28-0228 0565-32-1541 1 10 min. 1500 yen Toyota Kaikan Museum Please Note: If taxi is not at station, (North Exit) Taxi A 10:05 ( you may have to wait up 20-30 minutes. ) STEP It is six stops from Tsuchihashi Eki Bus Stop to Tsuchihashi Station D 9:58 4 13 min. Toyota Kaikan Bus Stop. 2 + + 200 yen Toyota 5 min. There is an underground tunnel to help you Toyota Kaikan Museum Oiden Bus Walking A 10:16 cross the road upon arrival. * Please note tavel time may be longer depending on the traffic. * Based on the latest information as of March 7, 2018. Meitetsu Tsuchihashi Station map Toyota Kaikan vicinity map Towards Toyota City North Exit Head Office Technical Center Taxi Station Clock Tower Train railway Toyota-cho Grounds Grounds Main Building Chiryu Toyotashi Pedestrian Toyota Kaikan Underpass -

Shinkansen Bullet Train
Jōetsu Shinkansen (333.9 km) Train Names: TOKI, TANIGAWA Max-TOKI, Max-TANIGAWA JAPAN RAIL PASS Can also be Used for Shinkansen Jōetsu Shinkansen "Max-TOKI"etc. “bullet train” Travel Akita Shinkansen "KOMACHI" Akita Shinkansen (662.6 km) Train Name: KOMACHI Akita Shin-Aomori Yamagata Shinkansen "TSUBASA" Hokuriku Shinkansen (450.5 km) Yamagata Shinkansen Train Names: KAGAYAKI, HAKUTAKA, (421.4 km) Shinjo¯ Morioka TSURUGI, ASAMA Train Name: TSUBASA Niigata Yamagata Sendai Kanazawa Toyama Nagano Hokuriku Shinkansen "KAGAYAKI"etc. Fukushima Takasaki Omiya¯ Sanyō & Kyūshū Shinkansen "SAKURA" Sanyō Shinkansen (622.3 km) Train Names: NOZOMI*, MIZUHO*, Tōhoku Shinkansen "HAYABUSA "etc. Tōkaidō & Sanyō Shinkansen "HIKARI" HIKARI (incl. HIKARI Rail Star), SAKURA, KODAMA Tōkaidō Shinkansen (552.6 km) (Tōkyō thru Hakata, 1,174.9km) Train Names: NOZOMI*, HIKARI, KODAMA Hakata Kokura Hiroshima Okayama Shin-Osaka¯ Kyōto Nagoya Shin-Yokohama Shinagawa Tokyo¯ ¯ * There are six types of train services, “NOZOMI,” “MIZUHO,” “HIKARI,” “SAKURA,” “KODAMA” and “TSUBAME” trains on the Tōkaidō, Sanyō and Kyūshū Shinkansen, and the stations at which trains stop vary with train types. The JAPAN RAIL PASS is only valid for “HIKARI,” “SAKURA,” “KODAMA” Tōhoku Shinkansen "HAYATE," "YAMABIKO,"etc. and “TSUBAME” trains, and not valid for any seats, reserved or non-reserved, on “NOZOMI” and “MIZUHO” trains. To travel on the Tōkaidō, Sanyō and Kyūshū Shinkansen, the pass holders must take Tōhoku Shinkansen (713.7 km) “HIKARI,” “SAKURA,” “KODAMA” or “TSUBAME” trains, or -

Interaction of Lifecycle Properties in High Speed Rail Systems Operation
Interaction of Lifecycle Properties in High Speed Rail Systems Operation by Tatsuya Doi M.E., Aeronautics and Astronautics, University of Tokyo, 2011 B.E., Aeronautics and Astronautics, University of Tokyo, 2009 Submitted to the Institute for Data, Systems, and Society in partial fulfillment of the requirements for the degree of Master of Science in Engineering Systems at the Massachusetts Institute of Technology June 2016 © 2016 Tatsuya Doi. All rights reserved. The author hereby grants to MIT permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part in any medium now known or hereafter created. Signature of Author: ____________________________________________________________________ Institute for Data, Systems, and Society May 6, 2016 Certified by: __________________________________________________________________________ Joseph M. Sussman JR East Professor of Civil and Environmental Engineering and Engineering Systems Thesis Supervisor Certified by: __________________________________________________________________________ Olivier L. de Weck Professor of Aeronautics and Astronautics and Engineering Systems Thesis Supervisor Accepted by: _________________________________________________________________________ John N. Tsitsiklis Clarence J. Lebel Professor of Electrical Engineering IDSS Graduate Officer 1 2 Interaction of Lifecycle Properties In High Speed Rail Systems Operation by Tatsuya Doi Submitted to the Institute for Data, Systems, and Society on May 6, 2016 in Partial Fulfillment of the Requirements for the Degree of Master of Science in Engineering Systems ABSTRACT High-Speed Rail (HSR) has been expanding throughout the world, providing various nations with alternative solutions for the infrastructure design of intercity passenger travel. HSR is a capital-intensive infrastructure, in which multiple subsystems are closely integrated. Also, HSR operation lasts for a long period, and its performance indicators are continuously altered by incremental updates. -

Oigawa Railway Shin-Shimizu Meitetsu Ikawa Line Shimizu Port
Shizuoka Railway & Bus Route Map Shinjuku Tokyo Machida Fujiyoshida➡ Shibuya Hamamatsucho Hon-Atsugi ➡ ➡ Shiojiri Tatsuno Kofu ➡ Shinagawa Keikyu Kamata Shin-Yokohama Haneda Minobu Line Minobu Line 30 min by bus from Airport Fujinomiya Station Shin-Matsuda Yokohama Shiraito Falls Mt.Fuji Kozu SHIZUOKA Gotemba Odakyu Matsuda Electric Misakubo Railway Gotemba Gotemba Line Odawara Fujinomiya Premium Outlets Kobe/Osaka/Kyoto Shuttle bus available Tokaido Line Chuo Line ➡ from Gotemba Station GUIDE M AP Sakuma Gakunan Railway lida Line lida Line Susono 10 min by bus from Shin-Fuji Gakunan Station to Fuji Station Yoshiwara Enoo Mishima Meitetsu Gifu Ito Line Sunzu Line Izuhakone Railway Atami ➡ Fuji Shin-Fuji Numazu Ikawa Ito Osaka Oigawa Railway Shin-Shimizu Meitetsu Ikawa Line Shimizu Port ➡ Nagoya Toyokawa Shimizu 70 min by Shuzenji Izu-Kogen Shizutetsu Suruga Bay Ferry ➡ Shuzenji Spa FUJI Izu Kyuko Line This area spreads out at the base of Japan’s most iconic site, the breathtaking Kanayama Sumatakyo Railway Jingu-mae Higashi-Shizuoka Shin-Osaka Onsen Shin-Shizuoka Meitetsu Nagoya Line Toyokawa-Inari Okuizumi Mount Fuji. Visitors can take in the beauty of the area’s waterfalls and flowing Nagoya Nihondaira Toi CENTRAL Senzu Shizuoka Joren Ko Oigawa Railway Falls streams and enjoy a host of active pursuits, from golf and fishing to paragliding Main Line Meitetsu Airport Line Meitetsu Tokoname Line/ right in front of the famous mountain. Foodies will enjoy the local pasture-grown Yaizu Mikawa-Anjo Mikkabi Kawazu Enshu Railway Nishikajima Dogashima 1 hr 20 min from Tenhama Atami Station dairy products, famed Fujinomiya yakisoba noodles, and local baked goods. -

'Camellia T'. Synonym for 'Donckelaeri'. (Masayoshi). TC Cole
T. T. Fendig. 1951, American Camellia Yearbook, p.77 as ‘Camellia T’. Synonym for ‘Donckelaeri’. (Masayoshi). T.C. Cole. Trewidden Estate Nursery, 1995, Retail Camellia List, p.8. Abbreviation for Thomas Cornelius Cole. T.C. Patin. (C.japonica) SCCS., 1976, Camellia Nomenclature, p.147: Light red. Very large, full, semi- double with irregular, large petals and a spray of large stamens. Originated in USA by T.C. Patin, Hammond, Louisiana. Sport: T.C. Patin Variegated. T.C. Patin Variegated. (C.japonica), SCCS., 1976, Camellia Nomenclature, p.147 as ‘T.C. Patin Var.’: A virus variegated form of T.C. Patin - Light red blotched white. Originated in USA by T.C. Patin, Hammond, Louisiana. T.D. Wipper. Nagoya Camellia Society Bulletin, 1992, No.25. Synonym for Dave’s Weeper. T.G. Donkelari. Lindo Nurseries Price List, 1949, p.7. Synonym for ‘Donckelaeri’. (Masayoshi). T.K. Blush. (C.japonica) Wilmot, 1943, Camellia Variety Classification Report, 1943, p.14: A light pink sport of T.K. Variegated. Originated in USA. Synonym: ‘T.K. Pink’. T.K. Number 4. Florida Nursery and Landscaping Co. Catalogue, 1948 as ‘T.K. No.4’. Synonym for T.K. Variegated. T.K. Pink. Morris, 1954, RHS., The Rhododendron and Camellia Yearbook, p.113. Synonym for T.K. Blush. T.K. Red. Semmes Nursery Catalogue, 1942-1943, p.21. Synonym for T.K. Variegated Red. T.K. Variegata. Kiyono Nursery Catalogue, 1942-1943. Synonym for T.K. Variegated. T.K. Variegated. (C.japonica) Kiyono Overlook Nursery Catalogue, 1934, p.14: Semi-double. Light pink edged dark pink. Gerbing’s Azalea Gardens Catalogue, 1938-1939: Semi-double, white flowers striped pink, rose and lavender, some flowers solid colour, purple and pink.