Development of Evolution Based Technology for Image Recognition Systems Jens-Petter S. Sandvik
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
2B-1 Application of Regulatory Signs Regulatory
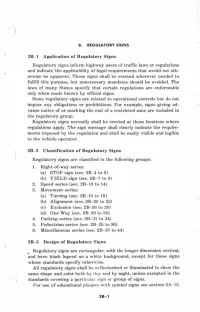
6. REGULATORY SIGNS 2B-1 Application of Regulatory Signs Regulatory signs inform highway users of traffic laws or regulations and indicate the applicability of legal requirements that would not oth- erwise be apparent. These signs shall be erected wherever needed to fulfill this purpose, but unnecessary mandates should be avoided. The laws of many States specify that certain regulations are enforceable only when made known by official signs. Some regulatory signs are related to operational controls but do not impose any obligations or prohibitions. For example, signs giving ad- vance notice of or marking the end of a restricted zone are included in the regulatory group. Regulatory signs normally shall be erected at those locations where regulations apply. The sign message shall clearly indicate the require- ments imposed by the regulation and shall be easily visible and legible to the vehicle operator. 2B-2 Classification of Regulatory Signs Regulatory signs are classified in the following groups: 1. Right-of-way series: (a) STOP sign (sec. 2B-4 to 6) (b) YIELD sign (sec. 2B-7 to 9) 2. Speed series (sec. 2B-10 to 14) 3. Movement series: (a) Turning (see. 2B-15 to 19) (b) Alignment (sec. 2B-20 to 25) (c) Exclusion (see. 2B-26 to 28) (d) One Way (sec. 2B-29 to 30) 4. Parking series (see. 2B-31 to 34) 5. Pedestrian series (see. 2B-35 to 36) 6. Miscellaneous series (sec. 2B-37 to 44) 2B-3 Design of Regulatory Signs Regulatory signs are rectangular, with the longer dimension vertical, and have black legend on a white background, except for those signs whose standards specify otherwise. -

2C-1 Application of Warning Signs Warning Signs Are Used When It Is
C. WARNING SIGNS 2C-1 Application of Warning Signs Warning signs are used when it is deemed necessary to warn traffic of existing or potentially hazardous conditions on or adjacent to a high- way or street. Warning signs require caution on the part of the vehicle operator and may call for reduction of speed or a maneuver in the interest of his own safety and that of other vehicle operators and pedes- trians. Adequate warnings are of great assistance to the vehicle opera- tor and are valuable in safe-guarding and expediting traffic. The use of warning signs should be kept to a minimum because the unnecessary use of them to warn of conditions which are apparent tends to breed disrespect for all signs. Even on the most modern expressways there may be some conditions to which the driver can be alerted by means of warning signs. These conditions are in varying degrees common to all highways, and existing standards for warning signs are generally applicable to expressways. Typical locations and hazards that may warrant the use of warning signs are: 1. Changes in horizontal alignment 2. Intersections 3. Advance warning of control devices 4. Converging traffic lanes 5. Narrow roadways 6. Changes in highway design 7. Grades 8. Roadway surface conditions 9. Railroad crossings 10. Entrances and crossings 11. Miscellaneous Warning signs specified herein cover most conditions that are likely to be met. Special warning signs for highway construction and mainte- nance operations, school areas, railroad grade crossings and bicycle fa- cilities are dealt with in Parts VI through IX of this Manual. -
Frutiger (Tipo De Letra) Portal De La Comunidad Actualidad Frutiger Es Una Familia Tipográfica
Iniciar sesión / crear cuenta Artículo Discusión Leer Editar Ver historial Buscar La Fundación Wikimedia está celebrando un referéndum para reunir más información [Ayúdanos traduciendo.] acerca del desarrollo y utilización de una característica optativa y personal de ocultamiento de imágenes. Aprende más y comparte tu punto de vista. Portada Frutiger (tipo de letra) Portal de la comunidad Actualidad Frutiger es una familia tipográfica. Su creador fue el diseñador Adrian Frutiger, suizo nacido en 1928, es uno de los Cambios recientes tipógrafos más prestigiosos del siglo XX. Páginas nuevas El nombre de Frutiger comprende una serie de tipos de letra ideados por el tipógrafo suizo Adrian Frutiger. La primera Página aleatoria Frutiger fue creada a partir del encargo que recibió el tipógrafo, en 1968. Se trataba de diseñar el proyecto de Ayuda señalización de un aeropuerto que se estaba construyendo, el aeropuerto Charles de Gaulle en París. Aunque se Donaciones trataba de una tipografía de palo seco, más tarde se fue ampliando y actualmente consta también de una Frutiger Notificar un error serif y modelos ornamentales de Frutiger. Imprimir/exportar 1 Crear un libro 2 Descargar como PDF 3 Versión para imprimir Contenido [ocultar] Herramientas 1 El nacimiento de un carácter tipográfico de señalización * Diseñador: Adrian Frutiger * Categoría:Palo seco(Thibaudeau, Lineal En otros idiomas 2 Análisis de la tipografía Frutiger (Novarese-DIN 16518) Humanista (Vox- Català 3 Tipos de Frutiger y familias ATypt) * Año: 1976 Deutsch 3.1 Frutiger (1976) -
Seretny A. a Co to Takiego A1-A2.Pdf
987777 987777 987777 987777 ISBN 97883-242-1105-0 987777 SPIS TREŚCI Wstęp 7 Introduction 9 Introduction 11 Vorwort 13 Jak korzystać ze Słownika 16 How to use the dictionary 17 Comment utiliser le dictionaire 18 Wie man dieses Wörterbuch benutzt 19 Spis tablic 21 Tablice 28 Wykaz skrótów 174 Indeks 175 (w języku polskim, angielskim, francuskim i niemieckim) Dodatek 250 A. Wagi B. Miary odległości C. Miary czasu D. Liczebniki E. Znaki interpunkcyjne F. Dodatek geograficzny 5 987777 6 987777 WSTĘP A co to takiego? Obrazkowy słownik języka polskiego po raz pierwszy ukazał się w roku 1993 i był pierwszym słownikiem tego typu przezna− czonym dla uczących się języka polskiego jako obcego. Był on adreso− wany zarówno do tych, którzy naukę rozpoczynali, jak i do tych, którzy chcieli poszerzyć swoją znajomość polskiego słownictwa. Wszystkie ar− tykuły hasłowe słownika definiowane były za pomocą obrazków. Dzięki takiej technice możliwe było uniknięcie wielu kłopotów związanych z definiowaniem pojęć podstawowych, stanowiących zasadniczy kor− pus pracy. Pierwsze wydanie, mimo bardzo skromnej szaty graficznej – plansze słownika były czarno−białe – cieszyło się sporą popularnością wśród uczących się (posługiwano się nim i w kraju i za granicą) i jego nakład wkrótce się wyczerpał. Korzystając z nadarzającej się okazji postanowiliśmy przygotować kolejne wydanie Obrazkowego słownika języka polskiego uwzględniając w nim zarówno nowe pomysły autorów jak i sugestie oraz spostrzeże− nia użytkowników. Zasadnicza koncepcja pracy, zgodnie z którą zna− czenia jednostek leksykalnych definiowane są za pomocą rysunków, nie uległa zmianie. Jednakże dzięki nowym, kolorowym tablicom nie− zwykle zyskała szata graficzna słownika i poprawiła się czytelność rysun− ków. Mieliśmy także możliwość wprowadzenia do nich nowych ele− mentów leksykalnych, przez co wzrosła nieco liczba haseł słowniczka. -

Speed Limits) (Jersey) Order 2003
ROAD TRAFFIC (SPEED LIMITS) (JERSEY) ORDER 2003 Revised Edition 25.550.44 Showing the law as at 1 January 2019 This is a revised edition of the law Road Traffic (Speed Limits) (Jersey) Order 2003 Arrangement ROAD TRAFFIC (SPEED LIMITS) (JERSEY) ORDER 2003 Arrangement Article 1 Interpretation ................................................................................................... 5 2 30 mph speed limit .......................................................................................... 5 3 20 mph speed limit .......................................................................................... 5 4 15 mph speed limit .......................................................................................... 5 4A Part-time speed limits indicated by traffic signs ............................................. 6 4B Part-time speed limits at schools..................................................................... 6 4C Part-time speed limits at works ....................................................................... 6 5 Citation ............................................................................................................ 6 SCHEDULE 1 7 30 MPH SPEED LIMIT 7 SCHEDULE 2 16 20 MPH SPEED LIMIT 16 SCHEDULE 3 21 15 MPH SPEED LIMIT 21 Supporting Documents ENDNOTES 29 Table of Legislation History......................................................................................... 29 Table of Renumbered Provisions ................................................................................. 29 Table of -

The Public Debate on Jock Kinneir's Road Sign Alphabet
Ole Lund The public debate on Jock Kinneir’s road sign alphabet Prelude There has been some recent interest In August 1961 two researchers at the Road Research Laboratory in in Jock Kinneir and Margaret Britain published a paper on the ‘Relative effectiveness of some letter Calvert’s influential traffic signs types designed for use on road traffic signs’ (Christie and Rutley and accompanying letterforms for 1961b). It appeared in the journal Roads and Road Construction. A Britain’s national roads from the late shorter version was published in the same month (Christie and 1950s and early 1960s. Their signs Design and alphabets prompted a unique Rutley 1961c). These two papers were both based on a report ‘not for public debate on letterform legibility, publication’ finished in January the same year (Christie and Rutley which provoked the Road Research 1961a). These papers represented the culmination of a vigorous public Laboratory to carry out large-scale debate on letterform legibility which had been going on since March legibility experiments. Many people 1959. The controversy and the Road Research Laboratory’s subse- participated in the debate, in national quent experiments happened in connection with the introduction newspapers, design and popular of direction signs for Britain’s new motorways.¹ science magazines, technical journals, and radio. It was about alphabets and The design of these directional and other informational motorway signs that would soon become – and signs represented the first phase of an overall development of a new still are – very prominent in Britain’s coherent system of traffic signs in Britain between 1957 and 1963. -

Anew Approach for License Plate Recognition Using the Sift Algorithm
Signal & Image Processing : An International Journal (SIPIJ) Vol.4, No.1, February 2013 ALPR S - A NEW APPROACH FOR LICENSE PLATE RECOGNITION USING THE SIFT ALGORITHM F.A. Silva 1,3 , A.O. Artero 2, M.S.V. Paiva 3 and R.L. Barbosa 4 1University of Western São Paulo (Unoeste), Dept. of Computer Science, Presidente Prudente, São Paulo, Brazil [email protected] 2São Paulo State University (Unesp), School of Science and Technology, Presidente Prudente, São Paulo, Brazil [email protected] 3São Carlos Engineering School (USP), Electrical Engineering Department, São Carlos, São Paulo, Brazil [email protected] 4São Paulo State University (Unesp), Sorocaba, São Paulo, Brazil [email protected] ABSTRACT This paper presents a new approach for the automatic license plate recognition, which includes the SIFT algorithm in step to locate the plate in the input image. In this new approach, besides the comparison of the features obtained with the SIFT algorithm, the correspondence between the spatial orientations and the positioning associated with the keypoints is also observed. Afterwards, an algorithm is used for the character recognition of the plates, very fast, which makes it possible its application in real time. The results obtained with the proposed approach presented very good success rates, so much for locating the characters in the input image, as for their recognition. KEYWORDS License Plate Recognition, Character Recognition, SIFT 1. INTRODUCTION Nowadays, the intense use of video cameras along highways and also in urban areas has contributed a lot to control traffic and, in most applications, the license plate recognition (LPR) of the vehicles is the main objective in traffic analysis, because it consists in a safe way to distinguish clearly imaged vehicles. -

Traffic Sign Recognition System
uuHonda Sensing®uTraffic Sign Recognition System Traffic Sign Recognition System Reminds you of road sign information, such as the current speed limit, your vehicle 1Traffic Sign Recognition System has just passed through, showing it on the driver information interface. Not all signs may be displayed, but any signs posted on roadsides should not be ignored. The system does ■ How the System Works not work on the designated traffic signs of all the countries you travel, nor in all situations. When the camera located behind the rearview mirror captures traffic signs while Do not rely too much on the system. Always drive at driving, the system displays the ones that are recognized as designated for your speeds appropriate for the road conditions. vehicle. The sign icon will be displayed until the vehicle reaches a predetermined time and distance. Never apply a film or attach any objects to the windshield that could obstruct the camera’s field of vision and cause the system to operate abnormally. Scratches, nicks, and other damage to the windshield within the camera’s field of vision can cause the system to operate abnormally. If this occurs, we recommend that you replace the windshield with a genuine Honda replacement windshield. Making even minor repairs within the camera’s field of vision Driving or installing an aftermarket replacement windshield may also cause the system to operate abnormally. After replacing the windshield, have a dealer The sign icon also may switch to another one or disappear when: recalibrate the camera. Proper calibration of the camera is necessary for the system to operate properly. -

Analyses of the Effects of Bilingual Signs on Road Safety in Scotland – Final Report
Published Project Report PPR589 Analyses of the effects of bilingual signs on road safety in Scotland – final report N Kinnear, S Helman, S Buttress, L Smith, E Delmonte, L Lloyd and B Sexton Transport Research Laboratory PROJECT REPORT PPR589 Analyses of the effects of bilingual signs on road safety in Scotland by N Kinnear, S Helman, S Buttress, L Smith, E Delmonte, L Lloyd and B Sexton (TRL) Client: Transport Scotland, Neil Wands Copyright Transport Research Laboratory December 2012 The views expressed are those of the author(s) and not necessarily those of Transport Scotland. Date Name Approved Project Lorna Pearce 09/02/2012 Manager Technical Shaun Helman 09/02/2012 Referee Published Project Report When purchased in hard copy, this publication is printed on paper that is FSC (Forestry Stewardship Council) and TCF (Totally Chlorine Free) registered. Contents Amendment Record This report has been issued and amended as follows Version Date Description Editor Technical Referee 1 12/11/2010 Draft report NK SH 226/01/2011 Draft report with minor amendments NK SH 3 23/11/11 Draft final report LP SH 4 09/02/12 Final report NK SH TRL PPR589 Published Project Report Contents List of Figures iv List of Tables v Executive summary vii Abstract 1 1 Introduction 3 1.1 Background 3 1.2 Aim 4 1.3 Limitations 5 2 Methodology 6 2.1 Literature review 6 2.2 Analysis of accident data 6 2.3 Survey of drivers 6 2.4 Local authority interviews 7 2.5 Discussion 7 3 Literature Review 8 3.1 Bilingual road signs in Scotland 8 3.2 Driver information processing, -
Assessment of Mexican Driver Understanding of Existing Traffic Control Devices Used in Texas
Technical Report Documentation Page I. Report No. 2. Government Accession No. 3. Recipient's Catalog No. FHWA/TX-97/1274-1 4. Title and Subtitle 5. Report Date ASSESSMENT OF MEXICAN DRIVER UNDERSTANDING OF November 1996 EXISTING TRAFFIC CONTROL DEVICES USED IN TEXAS 6. Perforn1ing Organization Code 7. Author(s) 8. Performing Organization Report No. H. Gene Hawkins, Jr., Dale L. Picha, Bret L. Mann, Charles R. Research Report 12 74-1 Mcllroy, Katie N. Womack, and Conrad L. Dudek 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) Texas Transportation Institute The Texas A&M University System 11. Contract or Grant No. College Station, Texas 77843-3135 Study No. 0-1274 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered Texas Department of Transportation Project Director: Interim: Research and Technology Transfer Office Carlos Lopez, P.E. September 1995 - August 1996 P. 0. Box 5080 Traffic Operations Div. 14. Sponsoring Agency Code Austin, Texas 78763-5080 (512)416-3135 15. Supplementary Notes Research performed in cooperation with the Texas Department of Transportation and the U.S. Department of Transportation, Federal Highway Administration. Research Study Title: Traffic Control Devices for Drivers in Texas Border Areas 16. Abstract The Texas-Mexico border area possesses many unique characteristics that could potentially reduce the effectiveness of traffic control devices used in these areas. This report describes the results from the first year of a three-year research project on the use of traffic control devices in Texas border areas. The first year was devoted to information gathering and an assessment of traffic control device understanding among drivers entering Texas from Mexico. -

Methods for Maintaining Traffic Sign Retroreflectivity
Methods for Maintaining Traffic Sign Retroreflectivity PUBLICATION NO. FHWA-HRT-08-026 NOVEMBER 2007 Research, Development, and Technology Turner-Fairbank Highway Research Center 6300 Georgetown Pike McLean, VA 22101-2296 FOREWORD Signs are considered essential to communicating regulatory, warning, and guidance information. It is critical that signs are able to fulfill this role during both daytime and nighttime periods. The ability of a sign to fulfill its role during nighttime periods is provided by a unique form of reflection known as “retroreflectivity.” The retroreflectivity of signs, however, degrades as the signs age in the field. A new standard in the Manual on Uniform Traffic Control Devices (MUTCD) requires that agencies maintain traffic signs to a minimum level of retroreflectivity. Various methods can be used within an agency’s sign management processes to meet and maintain a minimum retroreflectivity requirement for traffic signs. This report describes methods for maintaining traffic sign retroreflectivity that can be used by agencies to: • Systematically identify those signs that do not meet the minimum level of retroreflectivity. • Initiate activities that will upgrade signs that fall below the minimum required levels. • Monitor the retroreflectivity of in-place signs. • Create procedures that will assess the need to change practices and policies to enhance the nighttime visibility of signs. It is not appropriate to prescribe a single detailed method for all agencies to follow. The most cost effective and efficient method to maintain sign retroreflectivity will vary by agency, depending on the types of signs in service and the traffic and environmental conditions. Therefore, this report outlines several possible methods an agency can employ to maintain a minimum level of traffic sign retroreflectivity. -

Chapter 5: Signs, Pavement Markings and Signals
What Every Driver Must Know Chapter 5: Signs, Pavement Markings and Signals Did you know that . ? • In 1915, the first stop sign was used in Detroit. • In 1917, Michigan painted the first center line on a state highway, the Marquette-to- Negaunee Road. • In 1920, the first four-way traffic signal with red, yellow and green lights was used at Woodward Avenue and Fort Street in Detroit. Traffic signs A traffic sign’s shape gives you a clue as to its meaning and purpose. Learn to recognize these nine basic shapes and what they mean. Octagon Triangle Diamond STOP YIELD WARNING Pentagon Pennant Horizontal Rectangle SCHOOL WARNING/NO PASSING DIRECTIONS Vertical Rectangle Round Crossbuck LAW RAILROAD CROSSING RAILROAD CROSSING 41 Chapter 5: Signs, Pavement Markings and Signals What Every Driver Must Know Route markers Brown: Recreation/Cultural Interest Federal, State, and County Road Systems Interstate Freeway Sign U.S. Highway Sign Fluorescent Yellow or Fluorescent Green: School, Pedestrian or Bicycle Caution Fluorescent Pink: Incident/Emergency/ Unplanned Event State Highway Sign County Route Marker Regulatory signs Regulatory signs tell you about specific laws. These signs regulate the speed and movement of traffic. They are usually rectangular and have a color pattern of white and black, red, white and black, or red and white. Traffic sign colors A traffic sign’s color also carries meaning. Knowing the colors of basic traffic signs will make you a more informed driver. Red: Stop/Prohibited/Forbidden In 1912, William B. Bachman, Wolverine Auto Club of Michigan tour chairman, made Blue: Service/Hospitality plans for the group to travel 271 miles to the second annual Indianapolis Memorial Day Green: Directions/Guidance Race.