PACE Technical Report Series, Volume 5 Ivona Cetinić, Charles R
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Water Masers in the Saturnian System
A&A 494, L1–L4 (2009) Astronomy DOI: 10.1051/0004-6361:200811186 & c ESO 2009 Astrophysics Letter to the Editor Water masers in the Saturnian system S. V. Pogrebenko1,L.I.Gurvits1, M. Elitzur2,C.B.Cosmovici3,I.M.Avruch1,4, S. Montebugnoli5 , E. Salerno5, S. Pluchino3,5, G. Maccaferri5, A. Mujunen6, J. Ritakari6, J. Wagner6,G.Molera6, and M. Uunila6 1 Joint Institute for VLBI in Europe, PO Box 2, 7990 AA Dwingeloo, The Netherlands e-mail: [pogrebenko;lgurvits]@jive.nl 2 Department of Physics and Astronomy, University of Kentucky, 600 Rose Street, Lexington, KY 40506-0055, USA e-mail: [email protected] 3 Istituto Nazionale di Astrofisica (INAF) – Istituto di Fisica dello Spazio Interplanetario (IFSI), via del Fosso del Cavaliere, 00133 Rome, Italy e-mail: [email protected] 4 Science & Technology BV, PO 608 2600 AP Delft, The Netherlands e-mail: [email protected] 5 Istituto Nazionale di Astrofisica (INAF) – Istituto di Radioastronomia (IRA) – Stazione Radioastronomica di Medicina, via Fiorentina 3508/B, 40059 Medicina (BO), Italy e-mail: [s.montebugnoli;e.salerno;g.maccaferri]@ira.inaf.it; [email protected] 6 Helsinki University of Technology TKK, Metsähovi Radio Observatory, 02540 Kylmälä, Finland e-mail: [amn;jr;jwagner;gofrito;minttu]@kurp.hut.fi Received 18 October 2008 / Accepted 4 December 2008 ABSTRACT Context. The presence of water has long been seen as a key condition for life in planetary environments. The Cassini spacecraft discovered water vapour in the Saturnian system by detecting absorption of UV emission from a background star. Investigating other possible manifestations of water is essential, one of which, provided physical conditions are suitable, is maser emission. -

A Deeper Look at the Colors of the Saturnian Irregular Satellites Arxiv
A deeper look at the colors of the Saturnian irregular satellites Tommy Grav Harvard-Smithsonian Center for Astrophysics, MS51, 60 Garden St., Cambridge, MA02138 and Instiute for Astronomy, University of Hawaii, 2680 Woodlawn Dr., Honolulu, HI86822 [email protected] James Bauer Jet Propulsion Laboratory, California Institute of Technology 4800 Oak Grove Dr., MS183-501, Pasadena, CA91109 [email protected] September 13, 2018 arXiv:astro-ph/0611590v2 8 Mar 2007 Manuscript: 36 pages, with 11 figures and 5 tables. 1 Proposed running head: Colors of Saturnian irregular satellites Corresponding author: Tommy Grav MS51, 60 Garden St. Cambridge, MA02138 USA Phone: (617) 384-7689 Fax: (617) 495-7093 Email: [email protected] 2 Abstract We have performed broadband color photometry of the twelve brightest irregular satellites of Saturn with the goal of understanding their surface composition, as well as their physical relationship. We find that the satellites have a wide variety of different surface colors, from the negative spectral slopes of the two retrograde satellites S IX Phoebe (S0 = −2:5 ± 0:4) and S XXV Mundilfari (S0 = −5:0 ± 1:9) to the fairly red slope of S XXII Ijiraq (S0 = 19:5 ± 0:9). We further find that there exist a correlation between dynamical families and spectral slope, with the prograde clusters, the Gallic and Inuit, showing tight clustering in colors among most of their members. The retrograde objects are dynamically and physically more dispersed, but some internal structure is apparent. Keywords: Irregular satellites; Photometry, Satellites, Surfaces; Saturn, Satellites. 3 1 Introduction The satellites of Saturn can be divided into two distinct groups, the regular and irregular, based on their orbital characteristics. -

Cassini Observations of Saturn's Irregular Moons
EPSC Abstracts Vol. 12, EPSC2018-103-1, 2018 European Planetary Science Congress 2018 EEuropeaPn PlanetarSy Science CCongress c Author(s) 2018 Cassini Observations of Saturn's Irregular Moons Tilmann Denk (1) and Stefano Mottola (2) (1) Freie Universität Berlin, Germany ([email protected]), (2) DLR Berlin, Germany 1. Introduction two prograde irregulars are slower than ~13 h, while the periods of all but two retrogrades are faster than With the ISS-NAC camera of the Cassini spacecraft, ~13 h. The fastest period (Hati) is much slower than we obtained photometric lightcurves of 25 irregular the disruption rotation barrier for asteroids (~2.3 h), moons of Saturn. The goal was to derive basic phys- indicating that Saturn's irregulars may be rubble piles ical properties of these objects (like rotational periods, of rather low densities, possibly as low as of comets. shapes, pole-axis orientations, possible global color variations, ...) and to get hints on their formation and Table: Rotational periods of 25 Saturnian irregulars evolution. Our campaign marks the first utilization of an interplanetary probe for a systematic photometric Moon Approx. size Rotational period survey of irregular moons. name [km] [h] Hati 5 5.45 ± 0.04 The irregular moons are a class of objects that is very Mundilfari 7 6.74 ± 0.08 distinct from the inner moons of Saturn. Not only are Loge 5 6.9 ± 0.1 ? they more numerous (38 versus 24), but also occupy Skoll 5 7.26 ± 0.09 (?) a much larger volume within the Hill sphere of Suttungr 7 7.67 ± 0.02 Saturn. -

Evection Resonance in Saturn's Coorbital Moons Dr
Evection resonance in Saturn's coorbital moons Dr. Cristian Giuppone1, Lic Ximena Saad Olivera2, Dr. Fernando Roig2 (1) Universidad Nacional de Córdoba, OAC - IATE, Córdoba, Ar (2) Observatorio Nacional, Rio de Janeiro, Brasil OPS III - Diversis Mundi - Santiago - Chile Evection resonance in Saturn's coorbital moons MOTIVATION: recent studies in Jovian planets links the evection resonance and the architecture and evolution of their satellites. Evection resonance in Saturn's coorbital moons MOTIVATION: recent studies in Jovian planets links the evection resonance and the architecture and evolution of their satellites. GOAL: understand the evection resonance in the frame of coorbital motion of Satellites, through numerical evidence of its importance. Evection resonance ● The evection resonance is produced when the orbit pericenter of a satellite (ϖ) precess with the same period that the Sun movement as a perturber (λO) (Brouwer and Clemence, 1961) The evection angle → Ψ=λO – ϖ Satellite Sun Saturn ψ = 0° Evection resonance ● The evection resonance is produced when the orbit pericenter of a satellite (ϖ) precess with the same period that the Sun movement as a perturber (λO) (Brouwer and Clemence, 1961) The evection angle → Ψ=λO – ϖ Satellite Sun Saturn ψ = 0° Evection resonance ● Interior resonance: ● Produced by the oblateness of the planet. ● -3 Located at a ~ 10 RP (a~10 au), and several armonics are present. ● Importance: tides produce outward migration of inner moons. The moons can cross the resonance and may change substantially their orbital elements (e.g. Nesvorny et al 2003, Cuk et al. 2016) Evection resonance ● Interior resonance: ● Produced by the oblateness of the planet. -

Rings and Moons of Saturn 1 Rings and Moons of Saturn
PYTS/ASTR 206 – Rings and Moons of Saturn 1 Rings and Moons of Saturn PTYS/ASTR 206 – The Golden Age of Planetary Exploration Shane Byrne – [email protected] PYTS/ASTR 206 – Rings and Moons of Saturn 2 In this lecture… Rings Discovery What they are How to form rings The Roche limit Dynamics Voyager II – 1981 Gaps and resonances Shepherd moons Voyager I – 1980 – Titan Inner moons Tectonics and craters Cassini – ongoing Enceladus – a very special case Outer Moons Captured Phoebe Iapetus and Hyperion Spray-painted with Phoebe debris PYTS/ASTR 206 – Rings and Moons of Saturn 3 We can divide Saturn’s system into three main parts… The A-D ring zone Ring gaps and shepherd moons The E ring zone Ring supplies by Enceladus Tethys, Dione and Rhea have a lot of similarities The distant satellites Iapetus, Hyperion, Phoebe Linked together by exchange of material PYTS/ASTR 206 – Rings and Moons of Saturn 4 Discovery of Saturn’s Rings Discovered by Galileo Appearance in 1610 baffled him “…to my very great amazement Saturn was seen to me to be not a single star, but three together, which almost touch each other" It got more confusing… In 1612 the extra “stars” had disappeared “…I do not know what to say…" PYTS/ASTR 206 – Rings and Moons of Saturn 5 In 1616 the extra ‘stars’ were back Galileo’s telescope had improved He saw two “half-ellipses” He died in 1642 and never figured it out In the 1650s Huygens figured out that Saturn was surrounded by a flat disk The disk disappears when seen edge on He discovered Saturn’s -
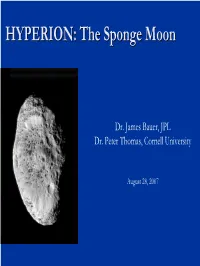
HYPERION: the Sponge Moon Moon
HYPERION:HYPERION: TheThe SpongeSponge MMoonoon Dr. James Bauer, JPL Dr. Peter Thomas, Cornell University August 28, 2007 HyperionHyperion && thethe SaturnianSaturnian SystemSystem HyperionHyperion fromfrom thethe GroundGround Bauer et al. 97 Hyperion Saturn RPX Mommery et al. 2000 R. H. Brown 85 HyperionHyperion && VoyagerVoyager Hyperion 's Icy Surface UVIS VIMS Brightest regions are exposed water ice in the rim of the crater that dominates the hemisphere in view (Hendrix & Hansen, 2007). UVIS ISS SpectraSpectra ofof brightbright andand darkdark regionsregions CO2 H2O 2.42μm COCO2 onon high-high- andand low-albedolow-albedo regionsregions ofof HyperionHyperion Full spectrum with model, Cruikshank et al. 2007 R. Clark, USGS Compositional maps Iapetus of Hyperion The low-albedo material on Hyperion (in the craters) appears to be The same as that on Saturn’s other satellite, Iapetus. OriginOrigin ofof darkdark material?material? The IR spectra show that Phoebe dark material is similar to Iapetus dark material, but the visual spectra show that HyperionI a and petus a re Buratti et al., 2001, Icarus more similar. (200-inch Hale telescope) Hyperion Composition Map Color code: Blue = H2O band depth VIMS/ISS Red = CO2 band depth Green = 2.42 μm band Yellow = CO2 + 2.42 μm Magenta = H2O + CO2 ISS Map by B. Dalton CO2 bands on Iapetus and Hyperion compared. The shift of the Hyperion’s CO2 band center toward shorter wavelengths indicates that the CO2 molecules are somehow combined with, or attached to, other materials (possibly water ice molecules). OriginOrigin ofof thethe J S U N COCO22 Original –requires requires re- re- supply to surface M. Brown, 2000 Converted CO: CO CO2 (Moore, Hudson, et al.) Product of H2O + carbonaceous material with UV Impact or shock-induced chemistry, e.g., H2O + CH3OH CO2 … (Naaaa Mvondo et al. -

Cassini's Coolest Results for Icy Moons During the Past Two Years
Cassini’s Coolest Results for Icy Moons during the Past Two Years Dr. Bonnie J. Buratti Satellite Orbiter Science Team (SOST) Lead Visual Infrared Mapping Spectrometer (VIMS) Team Senior Research Scientist Jet Propulsion Laboratory California Inst. of Technology Cassini Outreach (CHARM) Telecon August 23, 2016 Copyright 2014 California Institute of Technology. Government sponsorship acknowledged. Summary of Talk • Review of targeted flybys of the last two years • Review of small moons (“rocks”) flybys • Scientific results • End-of-Mission: what’s coming up • Monitoring jets and plumes on Enceladus • Spectacular flybys of small moons The final flybys: Dione and Enceladus Flyby Object Date Distance Flavor Goal D4 Dione 06/16/15 516 km Fields&Dust Understand the particle environment D5 Dione 08/17/15 475 km Gravity Understand the interior of Dione E20 Enceladus 10/14/15 1842 km Imaging Map the N. Pole of Enceladus E21 Enceladus 10/28/15 53 km Fields&Dust Understand the particle environment E22 Enceladus 12/19/15 5003 Imaging Understand energy balance and change Small Moons (“Rocks”) Best-ever Flybys on Dec. 6, 2015 Prometheus: 86 km wide; 37,000 km away Atlas: 30 km; 32,000 km Epimetheus: 86 km; 35,000 km E22: the last Enceladus Flyby (5003 km) Dec. 19, 2015 A view of Enceladus southern Thermal image of Damascus Sulcus, region taken during Cassini’s one of the four Tiger Stripes near final close encounter with the the south pole. enigmatic moon. Saturn can be seen in the lower background. Image of Samarkand Sulci, obtained during the E22 flyby at a distance of about 12,000 km. -

NASA Finds Hydrocarbons on Saturn's Moon Hyperion Bill Nye Speaks At
July 2007 NASA finds hydrocarbons on Saturn’s moon Hyperion NASA’s Cassini spacecraft has re- Cruikshank, a planetary scientist at expected ways with the ordinary ice. vealed for the first time surface details Ames and the paper’s lead author. Images of the brightest regions of of Saturn’s moon Hyperion, including “These molecules, when embedded Hyperion’s surface show frozen water cup-like craters filled with hydrocar- in ice and exposed to ultraviolet light, that is crystalline in form, like that bons that may indicate more wide- form new molecules of biological found on Earth. spread presence in our solar system of significance. This doesn’t mean that “Most of Hyperion’s surface ice basic chemicals necessary for life. we have found life, but it is a further is a mix of frozen water and organic indication that the basic chemistry dust, but carbon dioxide ice is also needed for life is widespread in the prominent. The carbon dioxide is not universe.” pure, but is somehow chemically at- NASA NASA photo Cassini’s ultraviolet imaging tached to other molecules,” explained spectrograph and visual and infrared Cruikshank. mapping spectrometer captured com- Prior spacecraft data from other positional variations in Hyperion’s moons of Saturn, as well as Jupiter’s surface. These instruments, capable moons Ganymede and Callisto, sug- of mapping mineral and chemical gest that the carbon dioxide molecule features of the moon, sent back data is “complexed,” or attached with confirming the presence of frozen other surface material in multiple water found by earlier ground-based ways. “We think that ordinary carbon observations, but also discovered solid dioxide will evaporate from Saturn’s carbon dioxide (dry ice) mixed in un- continued on page 2 Bill Nye speaks at Ames summit NASA’s Cassini spacecraft’s recent photograph of Saturn’s moon Hyperion shows its sponge- Bill Nye, ‘the Science Guy,’ like appearance with craters that are filled with spoke recently at the Participatory hydrocarbons. -
Perfect Little Planet Educator's Guide
Educator’s Guide Perfect Little Planet Educator’s Guide Table of Contents Vocabulary List 3 Activities for the Imagination 4 Word Search 5 Two Astronomy Games 7 A Toilet Paper Solar System Scale Model 11 The Scale of the Solar System 13 Solar System Models in Dough 15 Solar System Fact Sheet 17 2 “Perfect Little Planet” Vocabulary List Solar System Planet Asteroid Moon Comet Dwarf Planet Gas Giant "Rocky Midgets" (Terrestrial Planets) Sun Star Impact Orbit Planetary Rings Atmosphere Volcano Great Red Spot Olympus Mons Mariner Valley Acid Solar Prominence Solar Flare Ocean Earthquake Continent Plants and Animals Humans 3 Activities for the Imagination The objectives of these activities are: to learn about Earth and other planets, use language and art skills, en- courage use of libraries, and help develop creativity. The scientific accuracy of the creations may not be as im- portant as the learning, reasoning, and imagination used to construct each invention. Invent a Planet: Students may create (draw, paint, montage, build from household or classroom items, what- ever!) a planet. Does it have air? What color is its sky? Does it have ground? What is its ground made of? What is it like on this world? Invent an Alien: Students may create (draw, paint, montage, build from household items, etc.) an alien. To be fair to the alien, they should be sure to provide a way for the alien to get food (what is that food?), a way to breathe (if it needs to), ways to sense the environment, and perhaps a way to move around its planet. -

Concepts for Deep Space Travel: from Warp Drives and Hibernation to World Ships and Cryogenics
Research Article Curr Trends Biomedical Eng & Biosci Volume 12 Issue 5 - March 2018 Copyright © All rights are reserved by Martin Braddock DOI: 10.19080/CTBEB.2018.12.555847 Concepts for Deep Space Travel: From Warp Drives and Hibernation to World Ships and Cryogenics Martin Braddock* Sherwood Observatory, Mansfield and Sutton Astronomical Society, UK Submission: January 17, 2018; Published: March 14, 2018 *Corresponding author: Martin Braddock, Sherwood Observatory, Mansfield and Sutton Astronomical Society, Coxmoor Road, Sutton-in-Ashfield, Nottinghamshire, United Kingdom, Tel: ; Email: Introduction effect of an AG in animals has also recently been published [6] The routine detection of exoplanets and exomoons, either to identify potential candidates to harbor or sustain life [1]. and reviewed [7]. Irrespective of the advances in AG research, individually or within their own planetary systems has started we are faced with an as yet, unsurmountable challenge which is the longevity of human life. To date, the limited information Recent discoveries of the TRAPPIST-1 [2] and K2-138 [3] we possess shows candidate exoplanets to lie many light years systems illustrate the inevitability of short-listing new worlds distant, for example candidate exoplanets in the TRAPPIST-1 for further exploration, by unmanned probes or by manned system are approximately 40 lyr away [2]. For humans to be able spacecraft. The ergonomic challenges facing manned spaceflight advances in spacecraft propulsion technologies are essential. to travel to, let alone colonise distantly identified exoplanets, for both human physiological and psychological adaptation to microgravity are well understood and countermeasures for and In addition, extension of the functional human life-span has mitigation of the effects of microgravity are being developed attracted attention from a number of engineering disciplines [4]. -

How Do the Small Planetary Satellites Rotate?
How do the small planetary satellites rotate? A. V. Melnikov∗ and I. I. Shevchenko Pulkovo Observatory of the Russian Academy of Sciences, Pulkovskoje ave. 65/1, St.Petersburg 196140, Russia November 19, 2018 Abstract We investigate the problem of the typical rotation states of the small planetary satellites from the viewpoint of the dynamical stability of their rotation. We show that the majority of the discovered satellites with unknown rotation periods cannot rotate synchronously, because no stable synchronous 1:1 spin-orbit state exists for them. They rotate either much faster than synchronously (those tidally unevolved) or, what is much less probable, chaotically (tidally evolved objects or captured slow rotators). Key Words: Celestial mechanics; Resonances; Rotational dynamics; Satellites, general. The majority of planetary satellites with known rotation states rotates synchronously (like the Moon, facing one side towards a planet), i.e., they move in synchronous spin-orbit resonance 1:1. The data of the NASA reference guide (http://solarsystem.nasa.gov/planets/) combined with additional data (Maris et al., 2001, 2007; Grav et al., 2003) implies that, of the 33 satellites with known rotation periods, 25 rotate synchronously. For the tidally evolved satellites, this observational fact is theoretically expected. The planar rotation (i.e., the rotation with the spin axis orthogonal to the orbital plane) in synchronous 1:1 resonance with the orbital motion is the most likely final mode of the long- term tidal evolution of the rotational motion of planetary satellites (Goldreich and Peale, arXiv:0907.1939v2 [astro-ph.EP] 13 May 2010 1966; Peale, 1977). In this final mode, the rotational axis of a satellite coincides with the axis of the maximum moment of inertia of the satellite and is orthogonal to the orbital plane. -

Matthew Steven Tiscareno
Matthew Steven Tiscareno Senior Research Scientist voice: 650-810-0231 Carl Sagan Center for the Study of Life in the Universe fax: 650-961-7099 SETI Institute [email protected] 189 Bernardo Avenue #200 Mountain View CA 94043 Education 2004 Ph.D., Planetary Science, University of Arizona 1998 B.S., Planetary Science, California Institute of Technology Research Experience SETI Institute, Mountain View, California 2015 – Senior Research Scientist Cornell University, Ithaca, New York 2011 – 2015 Senior Research Associate 2004 – 2011 Research Associate, advisor: Joseph A. Burns University of Arizona, Tucson, Arizona 1999 – 2004 Graduate Research Assistant, advisor: Renu Malhotra (previously Paul Geissler, Carolyn Porco) California Institute of Technology, Pasadena, California 1996 – 1999 Undergraduate Research Assistant, advisor: Michael E. Brown (previously G. Edward Danielson) Current Research Interests Orbital and rotational dynamics of satellites and planets Disk-moon dynamical interactions Planetary rings Orbital histories of Kuiper Belt and Trans-Neptunian Objects Remote sensing for space projects Missions to the outer solar system Team Memberships and Associations Cassini Project, Participating Scientist, 2013 to present Cassini Project, Imaging Team Associate, 2004 to present Planetary Data System (PDS) Ring-Moon Systems Node, Team Member, 2015 to present James Webb Space Telescope (JWST) Guaranteed Time Observations, Team Member, 2016 to present James Webb Space Telescope (JWST) Early Release Science Observations, Team Member, 2017 to